Изобретение относится к кожгалантерей- ной отрасли легкой промышленности и может быть использовано для изготовления чемоданов.
Целью изобретения является повышение производительности путем сокращения времени на переналадку устройства при изменении типоразмеров чемоданов.
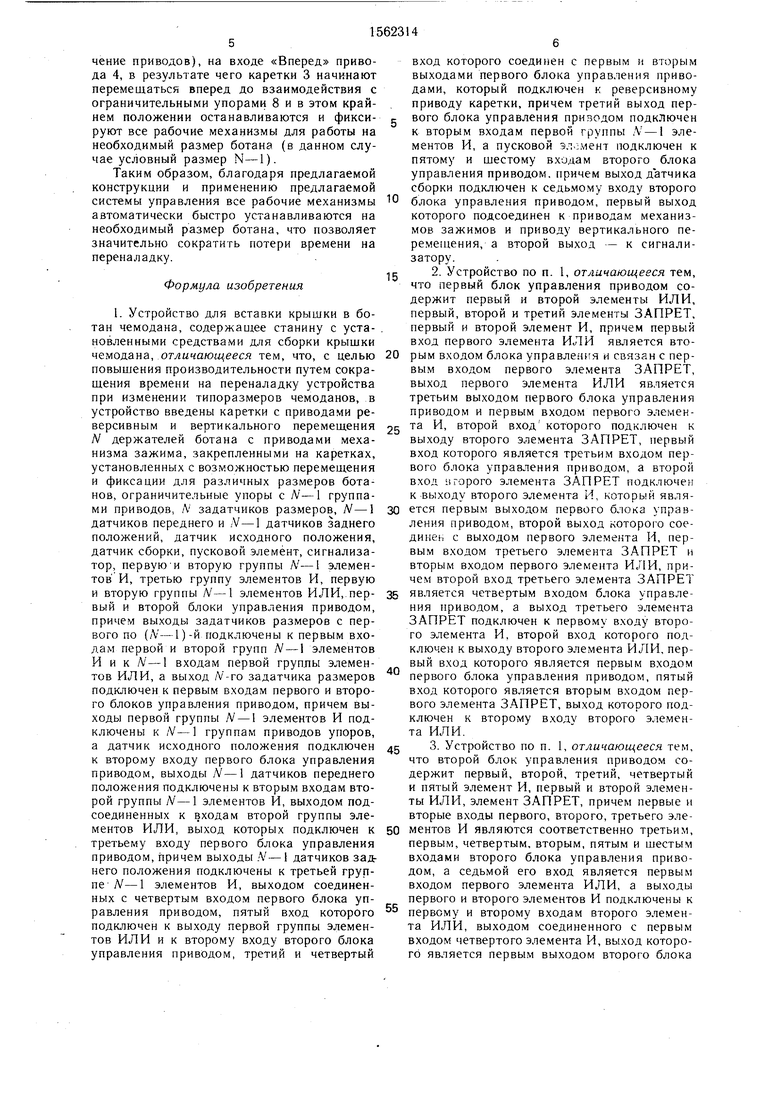
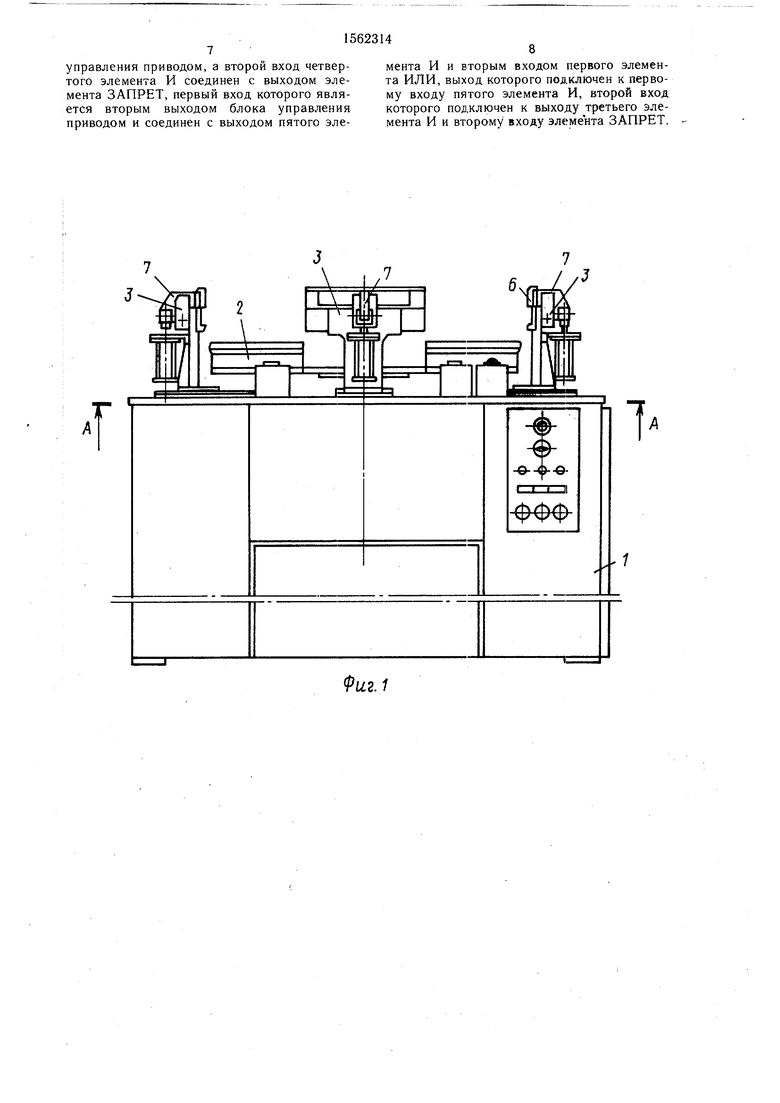
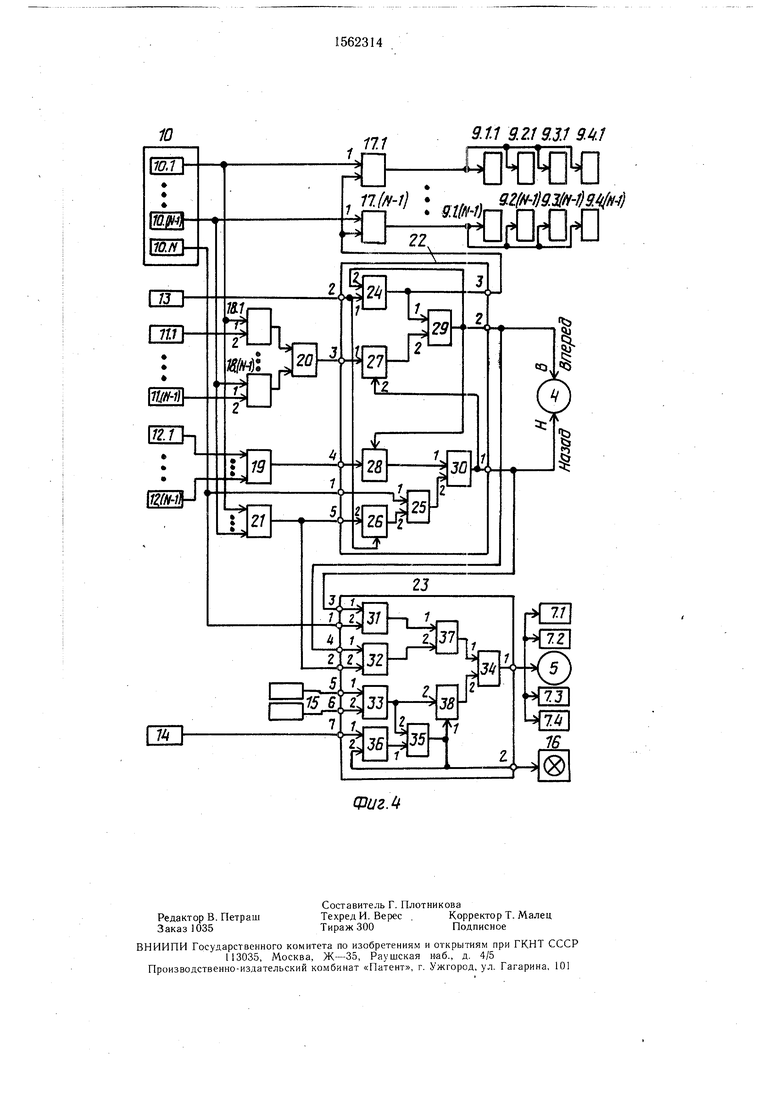
На фиг. 1 изображено устройство, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - функциональная схема управления устройством.
Устройство для вставки крышки в ботан чемодана содержит станину 1 с установленными средствами 2 для сборки крышки чемодана, каретки 3 с реверсивным приводом 4 и приводом 5 вертикального перемещения, держатели 6 ботана. Приводы 7 механизмов зажима, ограничительные упоры 8, с приводами 9,задатчики 10 размеров, датчики 11
переднего положения, датчики 12 заднего положения, датчик 13 исходного положения, датчик 14 сборки, пусковой элемент 15, сигнализатор 16, первую группу N-1 элементов И 17, вторую группу N-1 элементов И 18, третью группу элементов И 19, первую группу N-1 элементов ИЛИ 20, вторую группу N-1 элементов ИЛИ 21, первый блок 22 управления приводом, второй блок 23 управления приводом.
Первый блок 22 управления приводом содержит первый 24 и второй 25 элементы ИЛИ, первый 26, второй 27 и третий 28 элементы ЗАПРЕТ, первый 29 и второй 30 элементы И Второй блок 23 управления приводом содержит первый 31, второй 32, третий 33 четвертый 34 и пятый 35 элементы И, первый 36 и вторэй 37 элементы ИЛИ и элемент ЗАПРЕТ 38.
Устройство работает следующим образом.
СП
О N8
С
Допустим, с помощью задатчика 10 размеров (например, клавишного переключателя с механической фиксацией и автоматическим сбросом предыдущих значений) установлен условный размер чемодана (фиг. 2
ментов И 33 и 35, на втором ка 23 и на входе сигнализатор
После этого оператор сним изделие, устанавливает новую тан, включает привод, далее вс
и 3), т. е. включены приводы 9.1.1, 9.2.1, 5 аналогично описанному выше.
10
15
20
30
9.3.1 и 9.4.1, выдвинуты фиксаторы соответствующих ограничительных упоров 8, которые в переднем крайнем положении воздействуют на датчик 11.1 переднего положения и становятся на пути перемещающихся вперед по направляющим кареток 3 (имеются сигналы на выходах задатчика 10.1, датчика 11.1, на выходах элементов И 17.1, 18.1 и 32, элементов ИЛИ 20, 21, 25 и 37, на входах приводов 9.1.1, 9.2.1, 9.3.1 и 9.4.1 выдвижных упоров 8, на входе «Вперед привода 4 передвижных кареток и на втором и четвертом входах блока 23), в результате чего все рабочие, механизмы устанавливаются на необходимый размер.
После этого оператор берет крышку и надевает ее на соответствующее данному размеру средство для сборки крышки чемодана. Затем на планки кареток 3 устанавливает соответствующий данному размеру бо- тан. Убедившись в правильности установки крышки и ботана, оператор одновременно двумя руками воздействует на пусковой элемент 15 ПУСК, в результате чего на его выходах появляются сигналы, которые поступают соответственно на пятый и шестой входы блока 23 и на входы элемента И 33.
Наличие одновременно двух сигналов на входах элементов И 32 и 33 вызывает появление сигналов на их выходах, которые через элемент ИЛИ 37 и элемент ЗАПРЕТ 38 поступают на входы элемента И 34. Наличие одновременно двух сигналов на входах элемента И 34 вызывает появление сигнала на его выходе, на первом выходе блока 23, на входах приводов 7 механизмов зажима ботана и на входе привода 5, т. е. на каждой каретке 3 зажимается и фиксируется ботан. Одновременно привод 5 осуществляет подъем 40 крышки.
При достижении верхнего крайнего положения происходит воздействие на датчик 14 и осуществляется вставка крышки в ботан чемодана. На выходе датчика 14 появляется сигнал, который поступает на седьмой вход блока 23 и через элемент ИЛИ 36 на вход элемента И 35. Наличие одновременно двух сигналов на входах элемента И 35 вызывает появление сигнала на его выходе, на запретном входе элемента ЗАПРЕТ 38 и исчезновение сигналов на его выходе, на выходе элемента И 34, на первом выходе блока 23 и на входах приводов 5 и 7, также появляется сигнал на втором выходе блока 23 и на входе сигнализатора 16. Ботан возвращается в исходное положение, а оператор, руководствуясь командой сигнализатора 16, освобождает кнопки 15, в результате чего исчезает сигнал на их выходах, на выходах элеЕсли требуется перейти на д например (N- 1), то оператор д установить задатчик 10. (Л/ - 1 автоматически сбрасывается п устанавливается новый размер исчезают сигналы на выходах з элементов И 17.1, 18.1, 29 и ИЛИ 20, 24 и 37 и на входах при 9.2.1, 9.3.1 и 9.4.1.
На каретки 3 прекращаетс упоров 8, которые начинают с вратных пружин перемещаться бождая сначала датчик 11.1, пе жения, а затем воздействуя на заднего положения; после чего нал на выходе датчика 11.1 тельно появляются сигналы на датчика 10.(/V - 1), датчика 12 19 и 25, элементов ЗАПРЕТ ментов И 19 и 30, на первом ка 22 и на входе «Назад прив ки 3 начинают перемещаться на нем положении вступают во вз со стационарными упорами 8 м типоразмера и воздействуют исходного положения, после че ходе появляется сигнал, котор на второй вход блока 22, на од элемента ИЛИ 24 и на запрет мента ЗАПРЕТ 26, в результа зает сигнал на его выходе и на мента ИЛИ 25 и элемента И 3 35 входе «Назад привода 4 каре
Наличие сигнала на вхо ИЛИ 24 вызывает появление с выходе, который поступает на о элементов И 29, на третий вы на один vs входов элемент 17.(/V-1). Наличие одновреме налов на входе элемента И 17. вает появление сигнала на его входах приводов 9.1.(/V-1) 9.3. (/V-1) и 9.4. (/V-1), в ре 45 выдвигаются в переднее крайн соответствующие упоры и воз датчик 1 1. (Л - 1), после чего н появляется сигнал, который пос рой вход элемента И 18.(/V-1
Наличие одновременно двух входе элемента И 18. (/V-1) вы
50
55
ление сигнала на его выходе, к элемент ИЛИ 20 и элемент ЗА ступает на второй вход элемен
Наличие одновременно двух входах элемента И 29 вызыва сигнала на его выходе, на вт блока 22, на втором входе элем на запрещающем входе элемент (предотвращающем протшюпол
ментов И 33 и 35, на втором выходе блока 23 и на входе сигнализатора 33.
После этого оператор снимает собранное изделие, устанавливает новую крышку и бо- тан, включает привод, далее все повторяется
аналогично описанному выше.
5 аналогично описанному выше.
0
5
0
30
40
Если требуется перейти на другой размер, например (N- 1), то оператор должен только установить задатчик 10. (Л/ - 1), после чего автоматически сбрасывается предыдущий и устанавливается новый размер ботана, т. е. исчезают сигналы на выходах задатчика 10.1, элементов И 17.1, 18.1, 29 и 32, элементов ИЛИ 20, 24 и 37 и на входах приводов 4, 9.1.1, 9.2.1, 9.3.1 и 9.4.1.
На каретки 3 прекращается воздействие упоров 8, которые начинают с помощью возвратных пружин перемещаться назад, освобождая сначала датчик 11.1, переднего положения, а затем воздействуя на датчик 12.1, заднего положения; после чего исчезает сигнал на выходе датчика 11.1 и последовательно появляются сигналы на выходах задатчика 10.(/V - 1), датчика 12.1, элементов 19 и 25, элементов ЗАПРЕТ 28 и 26, элементов И 19 и 30, на первом выходе блока 22 и на входе «Назад привода 4. Каретки 3 начинают перемещаться назад и в крайнем положении вступают во взаимодействие со стационарными упорами 8 максимального типоразмера и воздействуют на датчик 13 исходного положения, после чего на его выходе появляется сигнал, который поступает на второй вход блока 22, на один из входов элемента ИЛИ 24 и на запретный вход элемента ЗАПРЕТ 26, в результате чего исчезает сигнал на его выходе и на выходах элемента ИЛИ 25 и элемента И 30, а также на 35 входе «Назад привода 4 кареток 3.
Наличие сигнала на входе элемента ИЛИ 24 вызывает появление сигнала на его выходе, который поступает на один из входов элементов И 29, на третий выход блока 22, на один vs входов элементов И 17.1 - 17.(/V-1). Наличие одновременно двух сигналов на входе элемента И 17.(/V-1) вызывает появление сигнала на его выходе и на входах приводов 9.1.(/V-1), 9.2.(/V-1), 9.3. (/V-1) и 9.4. (/V-1), в результате чего 45 выдвигаются в переднее крайнее положение соответствующие упоры и воздействуют на датчик 1 1. (Л - 1), после чего на его выходе появляется сигнал, который поступает на второй вход элемента И 18.(/V-1).
Наличие одновременно двух сигналов на входе элемента И 18. (/V-1) вызывает появ50
5
ление сигнала на его выходе, который через элемент ИЛИ 20 и элемент ЗАПРЕТ 27 поступает на второй вход элемента И 29.
Наличие одновременно двух сигналов на входах элемента И 29 вызывает появление сигнала на его выходе, на втором выходе блока 22, на втором входе элемента ИЛИ 24, на запрещающем входе элемента ЗАПРЕТ 28 (предотвращающем протшюположное включение приводов), на входе «Вперед привода 4, в результате чего каретки 3 начинают перемещаться вперед до взаимодействия с ограничительными упорами 8 и в этом крайнем положении останавливаются и фикси- руют все рабочие механизмы для работы на необходимый размер ботанэ (в данном случае условный размер N-1).
Таким образом, благодаря предлагаемой конструкции и применению предлагаемой системы управления все рабочие механизмы автоматически быстро устанавливаются на необходимый размер ботана, что позволяет значительно сократить потери времени на переналадку.
Формула изобретения
1. Устройство для вставки крышки в бо- тан чемодана, содержащее станину с установленными средствами для сборки крышки чемодана, отличающееся тем, что, с целью повышения производительности путем сокращения времени на переналадку устройства при изменении типоразмеров чемоданов, в устройство введены каретки с приводами реверсивным и вертикального перемещения N держателей ботана с приводами механизма зажима, закрепленными на каретках, установленных с возможностью перемещения и фиксации для различных размеров бота- нов, ограничительные упоры с Л/-1 группами приводов, Л задатчиков размеров, N-1 датчиков переднего и Л/-1 датчиков заднего положений, датчик исходного положения, датчик сборки, пусковой элемент, сигнализатор, первую и вторую группы Л -1 элементов И, третью группу элементов И, первую и вторую группы /V-1 элементов ИЛИ, первый и второй блоки управления приводом, причем выходы задатчиков размеров с первого по (/V-1)-й подключены к первым входам первой и второй групп N - 1 элементов И и к N-1 входам первой группы элементов ИЛИ, а выход /V -ro задатчика размеров подключен к первым входам первого и второго блоков управления приводом, причем выходы первой группы N - 1 элементов И подключены к /V-1 группам приводов упоров, а датчик исходного положения подключен к второму входу первого блока управления приводом, выходы N-1 датчиков переднего положения подключены к вторым входам второй группы N-1 элементов И, выходом подсоединенных к входам второй группы элементов ИЛИ, выход которых подключен к третьему входу первого блока управления приводом, причем выходы /V-1 датчиков заднего положения подключены к третьей группе N-1 элементов И, выходом соединенных с четвертым входом первого блока управления приводом, пятый вход которого подключен к выходу первой группы элементов ИЛИ и к второму входу второго блока управления приводом, третий и четвертый
5
0
5
0
5
0
5
0
5
вход которого соединен с первым и вторым выходами первого блока управления приводами, который подключен к реверсивному приводу каретки, причем третий выход первого блока управления приводом подключен к вторым входам первой группы .V - 1 элементов И, а пусковой элемент подключен к пятому и шестому входам второго блока управления приводом, причем выход датчика сборки подключен к седьмому входу второго блока управления приводом, первый выход которого подсоединен к приводам механизмов зажимов и приводу вертикального перемещения, а второй выход - к сигнализатору.
2.Устройство по п. 1, отличающееся тем, что первый блок управления приводом содержит первый и второй элементы ИЛИ, первый, второй и третий элементы ЗАПРЕТ, первый и второй элемент И, причем первый вход первого элемента ИЛИ является вторым входом блока управленгя и связан с первым входом первого элемента ЗАПРЕТ, выход первого элемента ИЛИ является третьим выходом первого блока управления приводом и первым входом первого элемента И, второй вход которого подключен к выходу второго элемента ЗАПРЕТ, первый вход которого является третьим входом первого блока управления приводом, а второй вход игорого элемента ЗАПРЕТ подключен к выходу второго элемента И, который является первым выходом первого блока управления приводом, второй выход которого соединен с выходом первого элемента И, первым входом третьего элемента ЗАПРЕТ и вторым входом первого элемента ИЛИ, причем второй вход третьего элемента ЗАПРЕТ является четвертым входом блока управления приводом, а выход третьего элемента ЗАПРЕТ подключен к первому входу второго элемента И, второй вход которого подключен к выходу второго элемента ИЛИ, первый вход которого является первым входом первого блока управления приводом, пятый вход которого является вторым входом первого элемента ЗАПРЕТ, выход которого подключен к второму входу второго элемента ИЛИ.
3.Устройство по п. 1, отличающееся тем, что второй блок управления приводом содержит первый, второй, третий, четвертый и пятый элемент И, первый и второй элементы ИЛИ, элемент ЗАПРЕТ, причем первые и вторые входы первого, второго, третьего элементов И являются соответственно третьим, первым, четвертым, вторым, пятым и шестым входами второго блока управления приводом, а седьмой его вход является первым входом первого элемента ИЛИ, а выходы первого и второго элементов И подключены к первому и второму входам второго элемента ИЛИ, выходом соединенного с первым входом четвертого элемента И, выход которого является первым выходом второго блока
управления приводом, а второй вход четвертого элемента И соединен с выходом элемента ЗАПРЕТ, первый вход которого является вторым выходом блока управления приводом и соединен с выходом пятого элемента И и вторым входом первого элемента ИЛИ, выход которого подключен к первому входу пятого элемента И, второй вход которого подключен к выходу третьего элемента И и второму входу элемента ЗАПРЕТ.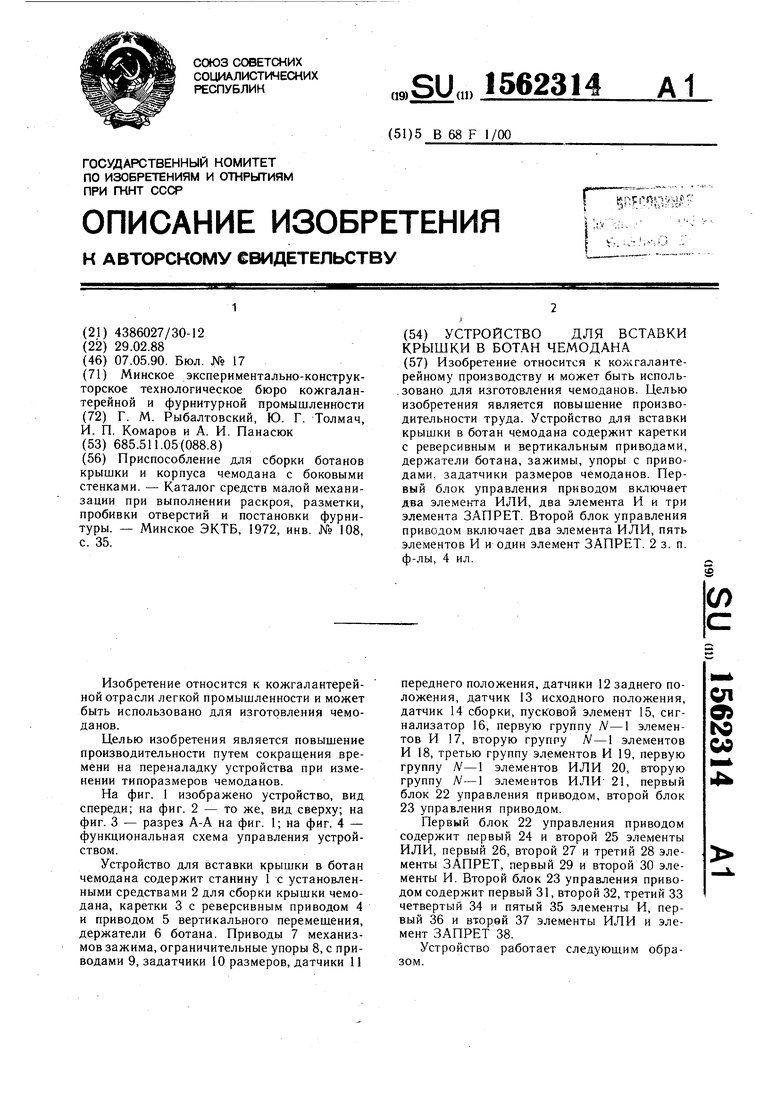

| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1997 |
|
RU2115135C1 |
| Устройство управления летучей пилой | 1979 |
|
SU998017A1 |
| Устройство для управления перегрузочной тележкой распределительного конвейера | 1985 |
|
SU1265123A1 |
| Автомат для укладки строительных изделий | 1991 |
|
SU1807935A3 |
| Устройство для управления приводом подачи стола плоскошлифовального станка | 1986 |
|
SU1348771A1 |
| Устройство для счета метража и определения теоретической массы проката | 1981 |
|
SU955096A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Устройство для управления аккумуля-TOPOM пОлОСы | 1979 |
|
SU814499A1 |
Изобретение относится к кожгалантерейному производству и может быть использовано для изготовления чемоданов. Целью изобретения является повышение производительности труда. Устройство для вставки крышки в ботан чемодана содержит каретки с реверсивным и вертикальным приводами, держатели ботана, зажимы, упоры с приводами, задатчики размеров 10 чемоданов. Первый блок управления приводом включает два элемента ИЛИ, два элемента - И и три элемента ЗАПРЕТ. Второй блок управления приводом включает два элемента ИЛИ, пять элементов И и один элемент ЗАПРЕТ. 3 з.п. ф-лы, 4 ил.
Т
Риг.1
О
-O--0--Gт
Фив. 2
т
отш
Щн-ЫЛМ&ЩнЛ
) : г пгт
-rUfLlnJrU
| Приспособление для сборки ботанов крышки и корпуса чемодана с боковыми стенками | |||
| - Каталог средств малой механизации при выполнении раскроя, разметки, пробивки отверстий и постановки фурнитуры | |||
| - Минское ЭКТБ, 1972, инв | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
