1 . 1
Изобретение относится к измерительной технике, может быть использовано для контроля угловых перемещений и является усовершенствованием датчика по основному авт. ев, № 1315791.
Цель изобретения - повышение точности датчика путем улучшения компенсации температурной погрешности в отрицательном диапазоне температур окружающей среды.
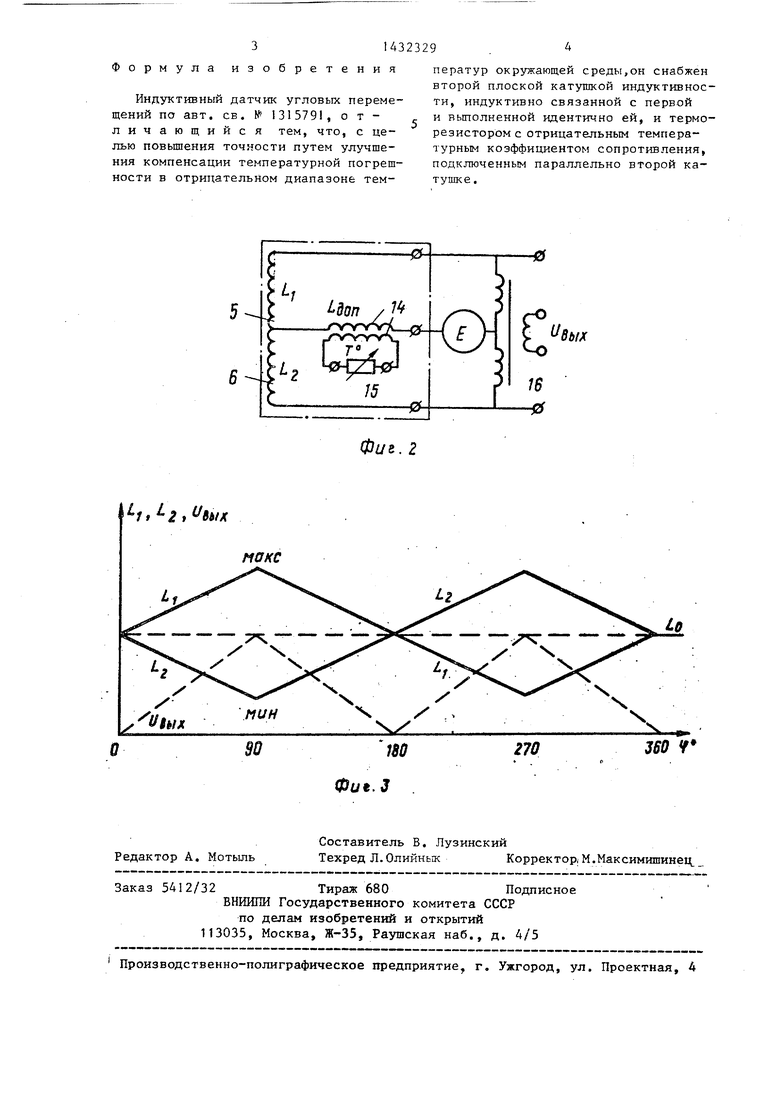
На фиг. 1 схематично показана конструкция индуктивного датчика угловь перемещений; на фиг. 2 - электричес- кая схема включения его обмоток; на фиг. 3 - зависимость изменения индук тивностей L) и L измерительных обмо ток датчика и его нЬкодного сигнала и. функции угла ф поворота ротора
oblX1
датчика.
Индуктивный датчик угловых перемещений содержит размещенные в стака нообразном корпусе 1 на статоре 2, имеющем растровые окна 3 и 4, две измерительные обмотки 5 и 6, установленные на общем изоляционном каркасе 7. Внутри статора 2 размещен ко аксиально с ним стаканообразньм ротор 8, также имеющий растровые окна 9 и 10. В торце корпуса 1 со стороны его закрытой части размещен цилиндр 11, заполненный жидкостью 12 и закры тьй мембраной 13. На параллельной поверхности мембраны установлены две плоские катушки 14 индуктивности, выполненные идентично одна к другой и находящиеся в тесной индуктивности связи благодаря тому, что они намотаны одновременно в два провода.
На каркасе 7 внутри корпуса закреплен терморезистор 15 с отрицательным температурньм коэффициентом сопротивления, переключенный параллельно второй плоской катушке 14 индук-. тивности, первая плоская катушка индуктивности подключена одним концом к точке соединения измерительных обмоток 5 и 6 датчика, а - к источнику питания переменного тока. Измерительные обмотки 5 и 6 образуют смежные плечи мостовой измерительной схемы (фиг. 2), два других плеча которой образованы обмотками выходного трансформатора 16,
При сборке датчика сначала вставляют в его корпус 1 обе катушки 4 индуктивности, выполненные в виде;ОД него конструктивного элемента, затем
размещают в корпусе цилиндр 1I, заполненный жидкостью 12, опорный подшипник 17, каркас 7 с обмотками 5, 6 и терморезистором 15, статор 2, ротор 8, второй опорный подшипник 18 и заканчивают сборку датчика затягиванием контрящей гайки 19.
Датчик работает следующим образом.
В исходном состоянии растровые окна 3, 4 и 9, 10 статора и ротора перекрывают друг друга на 50%,, при этом суммарные площади измерительных окон под обмотками 5 и 6, а следовательно, и их индуктивности L, и L (фиг. 3) равны. Поскольку эти обмотки включены в мостовую измерительную схему, то выходной сигнал датчика равен нулю. При угловом смещении ротора 8 на угол ц в любом направлении
0
5
0
5
0
5
выходной сигнал U
вых
датчика пропорционален величине угла ( смещения ротора (фиг. 3). При увеличении тем- 5 пературы окружающей среды индуктивности обмоток датчика увеличиваются. Одновременно расширяется жидкость 12 в цилиндре. 11, мембрана 13 приб- лижается к катушкам 14,, вследствие чего уменьшается их индуктивность за счет влияния вихревых токов, наводимых в мембране. Благодаря допол-. нительному уменьшению сопротивления терморезистора происходит еще большее уменьшение индуктивности, вносимой катшуками 14 в цепь питания мостовой измерительной схемы. Благодаря этому температурная погрешнос ть измерения угла ( несколько снижается. При уменьшении температуры окружающей среды индуктивности L, и L, обмоток 5 и 6 датчика уменьшаются. Объем жидкости 12 в цилиндре 11 уменьшается, мембрана.3 удаляется от сдвоенных катушек 14, индуктивность этих катушек увеличивается. Но так как этого увеличения недостаточно для компенсации температурного ухода, то дополнительное увеличение вносимого индуктивного сопротивления -в цепь питания мостовой схемы происходит за счет увеличения сопротивления терморезистора 15, имеющего отрицательный температурный коэффициент сопротивления.
Благодаря улучшению степени ком/ пенсации температурных погрешностей измерений повьш1ается точность предлагаемого датчика.
Формула изобретения
Индуктивный датчик угловых перемещений по авт. св. № 1315791, о т - личающийс я тем, что, с целью повьшения точности путем улучшения компенсации температурной погрешности в отрицательном диапазоне температур окружающей среды,он снабжен второй плоской катушкой индуктивности, индуктивно связанной с первой и выполненной идентично ей, и терморезистором с отрицательным температурным коэффициентом сопротивления, подключенным параллельно второй катушке.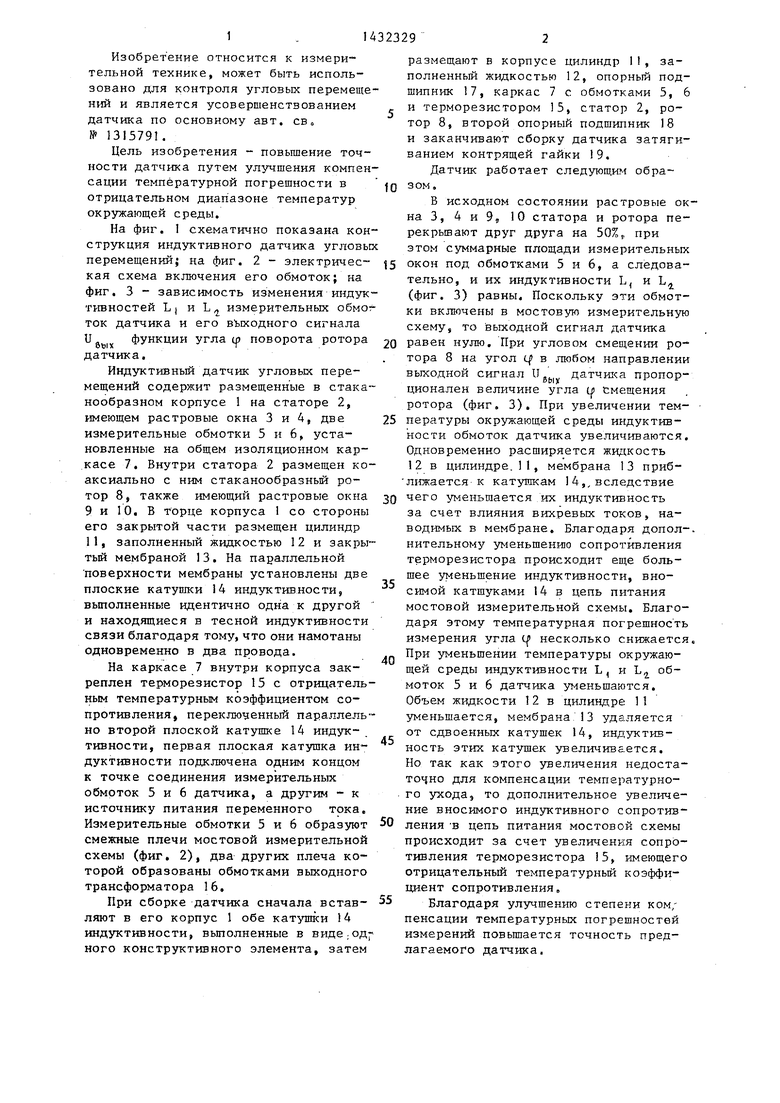
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный датчик угловых перемещений | 1985 |
|
SU1315791A1 |
| Индуктивный датчик угловых перемещений | 1990 |
|
SU1768953A1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2445633C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2442991C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231750C2 |
| Двухкоординатный датчик углов наклона | 1990 |
|
SU1783291A1 |
| Индуктивный датчик микроперемещений ротора активного магнитного подвеса | 2024 |
|
RU2834196C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Бесконтактный индуктивный датчик | 1987 |
|
SU1497448A2 |
Изобретение относится к измерительной технике. Цель - повышение точности индуктивного датчика угловых перемещений путем улучшения компенсации температурной погрешности, особенно в отрицательном диапазоне температур окружающей среды. В этом диапазоне температур ослабляется компенсирующее влияние плоской катушки 14 индуктивности, чувствительной к изменению зазора между нею и мембраной 13 и включенной в цель питания мос1 8 г /I..././ Ч ТОБОЙ схемы измерения, смежные плечи которой образованы измерительными обмотками 5 и 6 индуктивного датчика. Для улучшения степени компенсации температурной погрешности датчик снабжен второй катушкой 14 индуктивности, вьпполненной идентично первой и намотанной одновременно с нею в два провода. К зажимам второй катушки индуктивности подключен терморезистор 15 с отрицательным темпера- турньм коэффициентом сопротивления, В результате прн уменьшении температуры окружающей среды, когда -увеличивается зазор между мембраной 13 и плоскостью катушек 14 индуктивности, что обусловлено сжатием жидкости 12 в центре 11, происходит увеличение индуктивности катушек 14 и дополнительное увеличение падения напряжения на той катушке, которая включена в цепь питания мостовой схемы, за счет увеличения также и сопротивления терморезистора 15. 3 ил. 7 S // /2 / ID 4;а оо 00 tsp } /J rsj ;7
,вА/;г
Фг/г. г
LO
360 у
| Индуктивный датчик угловых перемещений | 1985 |
|
SU1315791A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
