й
00
1
Изобретение относится к электротехнике, а именно к преобразовательной технике, и может быть использовано при построении штульсных преобразователей постоянного напряжения в постоянное и постоянного напряжения в переменное любой формы в автоматике, электроприводе, в радиоэлектронике и других областях техники.
Цель изобретения - повьшение устойчивости импульсного преобразова- 1теля ХИЛ) .
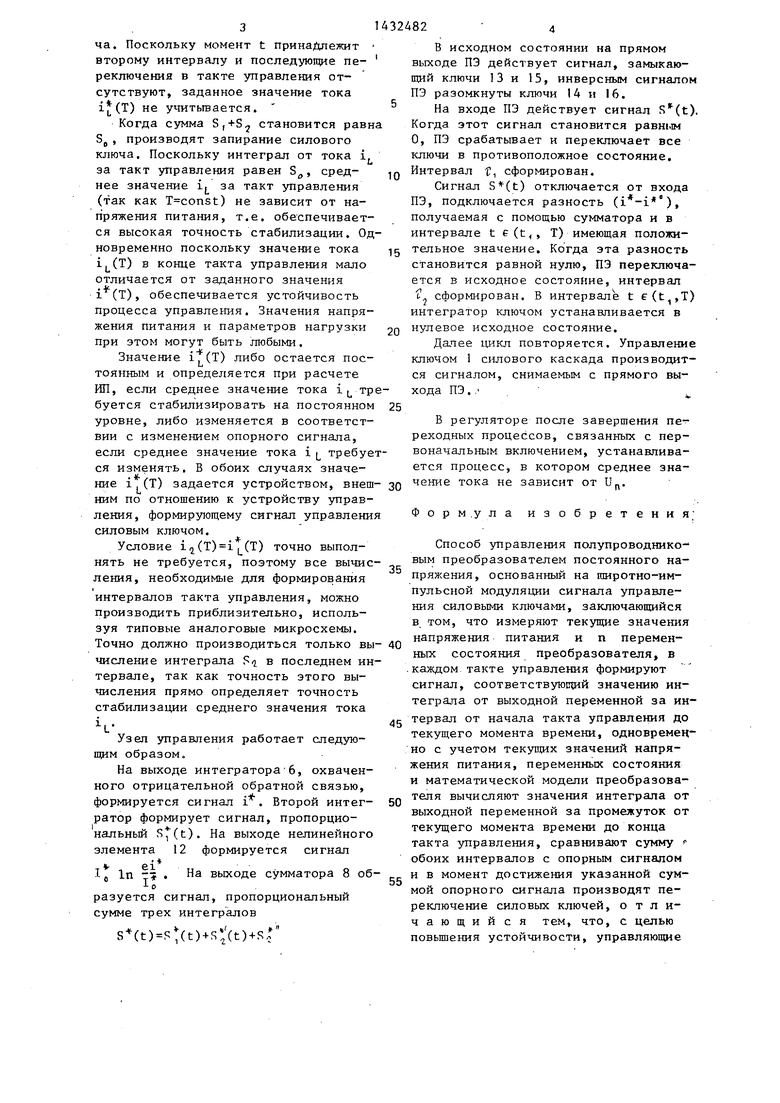
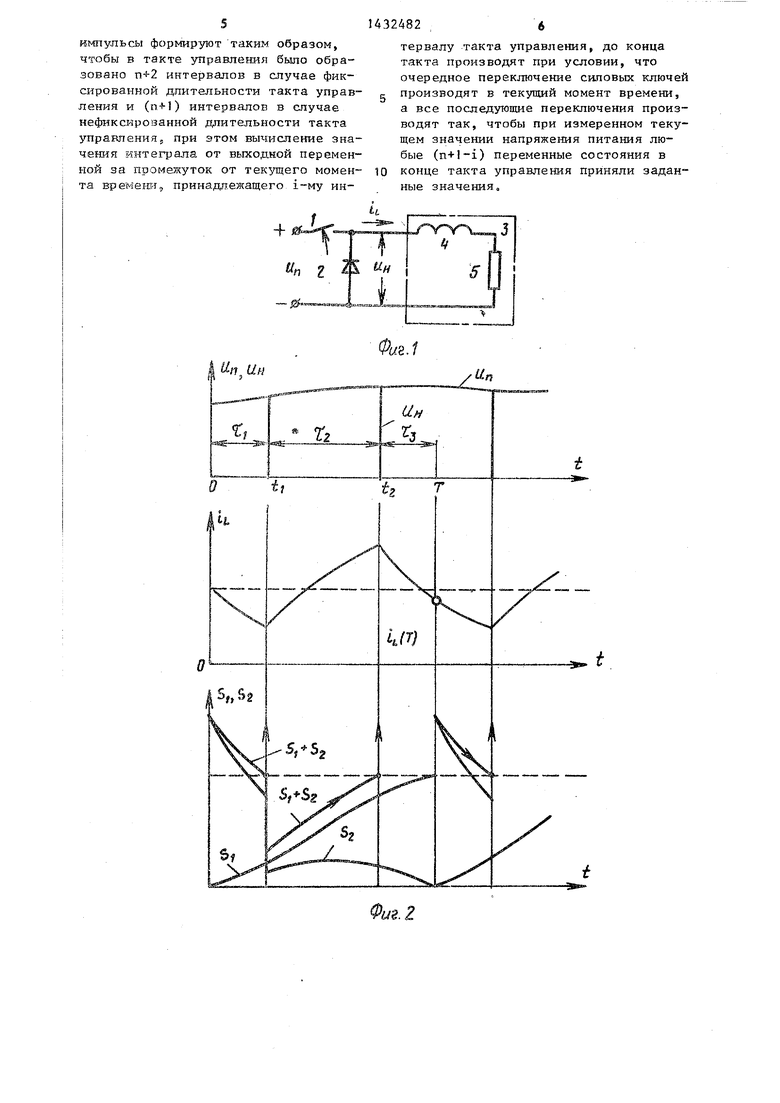
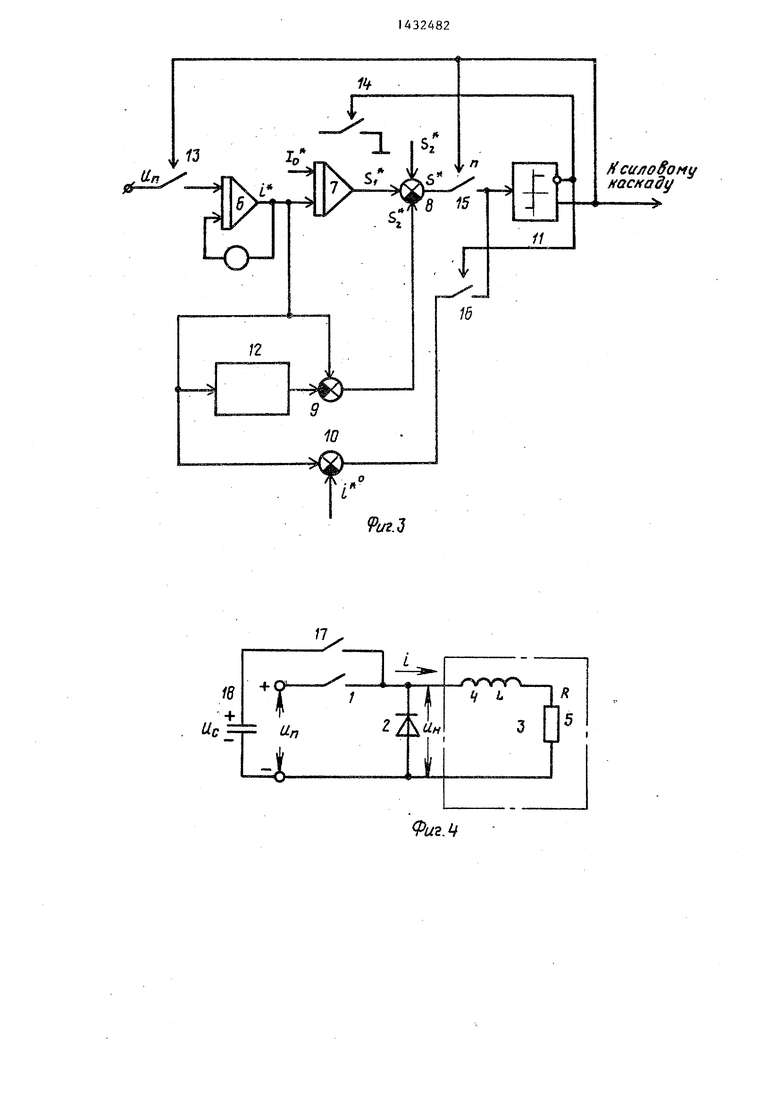
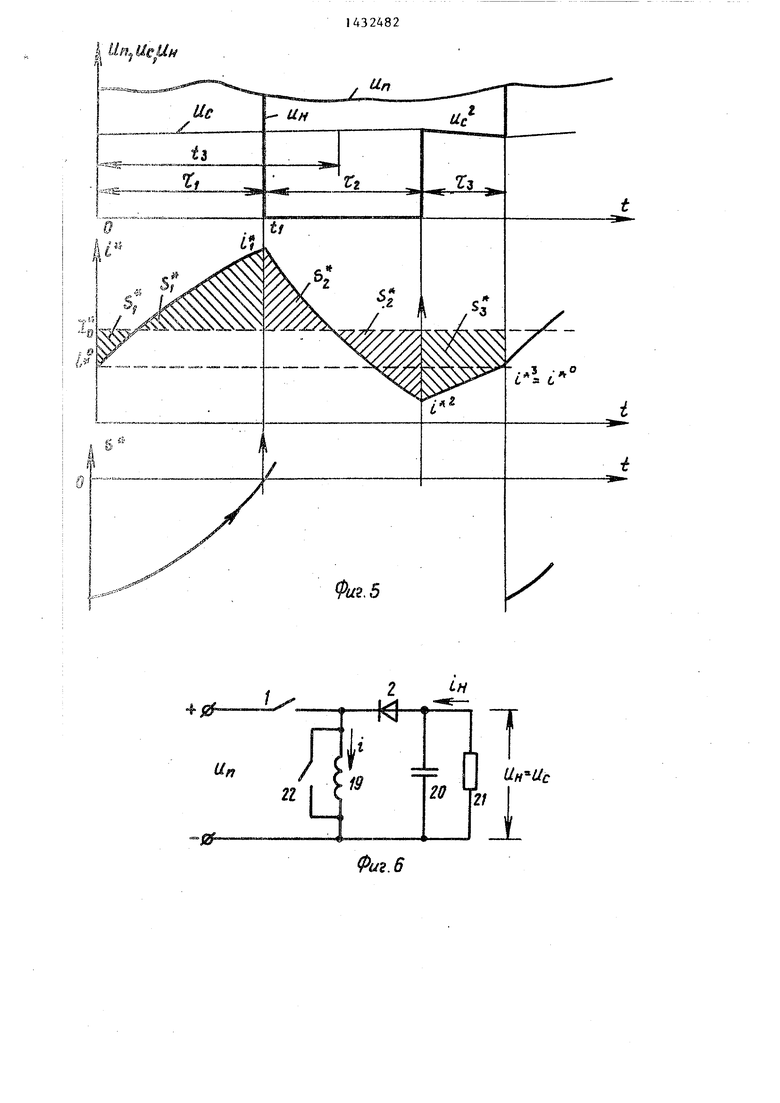
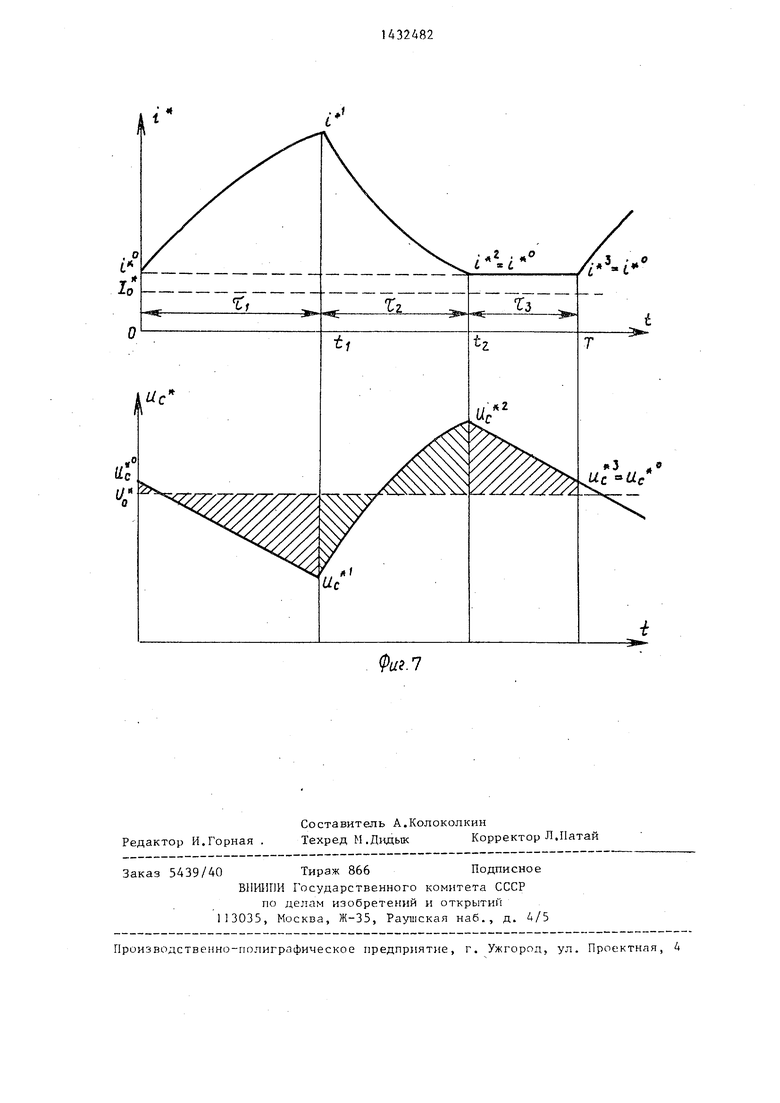
I На фиг.1 представлена схема им- |пульсного преобразователя; на фиг.2 временные диаграммы, поясняющие сущность предлагаемого способа; на |фиг„3 - схема устройства,реализуго- |п1;его предлагаемый способ применительно к силовому каскаду по фиг,1; на фиг,4 - схема силового каскада для Iреализации предлагаемого способа при I узле управлегшя,, работающем с пос- |тояннь м тактом (T const); на фиг.5 - Iдиаграмма рабо1Ъ1 узла управления; на iфиг с 6 и 7 - схема и диаграмма для ИП |С двумя реактивными элементами.
j И шульсный преобразователь содерI
|жит управляемьп полупроводниковый
ключ 1 и диод 2, нагрузку 3, имеющую индуктивность 4 и активное сопро Ь вление 5,
Узел управления (фи,3) состоит из двух интеграторов 6 и 7, трех сум |маторов 8 - 10, порогового элемента |(ПЭ) 11 и нелинейного элемента 12 и I ключей 13-16.
i Силовой каскад содержит допольш- тельный ключ 17, подключающий на вре |мя С j нагрузку к дополнительному кон |денсатору 18. Цепь заряда конденсато |ра не показана. Зто могут быть последовательно включенные дроссель и ключ, подключающие конденсатор к источнику питания (и г,) на время -uj. За время t-i конденсатор должен зарядиться до заданного напряжения и. После заряда конденсатор отключают от Up.
Ш (фиг.6) содержит основной ключ 1, диод 2, накопительный дроссель 19 и ко1зде.нсатор 20 фильтра, нагрузку 21, дополнительный ключ 22, замыка- юпщй дроссель в интервале t e(). Сущность способа управления рассматривают на примере импульсных преобразователей с RL-нагрузкой () для случая фиксированной длительнос
10
50
324822
ти такта преобразования (T const) (фиг.1). В этом случае формирование управляющих импульсов следует производить так, чтобы в такте управле- ния было образовано интервала. При широтно-импульсной модуляции это возможно, если оба фронта импульса, отпирающего силовой ключ импульсного преобразователя, не совпадают с тактовыми моментами времени, т.е. в такте управления чередуются пауза - импульс - пауза или импульс - пауза - импульс. В обоих случаях число перек. лючения силового ключа в такте управления одинаково. Однако точность управления выше в первом случае, так как при этом в третьем интервале напряжение питания и на ток в нагруз- ке нь действует, и изменение U не оказывает влияния на среднее значение тока Б нагрузке i после запирания силового ключа.
С момента времени (фиг.2) фор21; мируется сигнал, соответствующий значению интеграла -t
S, (t) ii.(t)dr; (0,t) ,
1°
. Одновременно путем вычисления формируется сигнал S(t), равный значению интеграла от тока i за промежуток времени от момента t до конца такта управления Т. Вычисление производится по измеренным значениям 1|(с) и и (t) при условии, что отпирание силового ключа осуществляется в дан- Ш51Й момент BpeMeiM t,, а его запира- 1ше - в такой момент времени 1,при котором ток i в конце такта преобразования становится равен заданному значению i (t), Поскольку , .а момент времени t принадлежит первому интервалу (), то, согласно форму- дг ле, запирание производят так, чтобы первая и единственная переменная состояния 1ц в конце такта управления приняла заданное значение.
Когда сумма S,+S становится равна опорному сигналу S , производят переключение, т.е. отпирание силового ключа 1. Первый интервал такта управления длительностью i, сформирован.
Далее в каждый момент времени t 7 продолжают формирование сигналов Я и So. Значение S при этом вычисляют при условии, что в момент t производится запирание силового клю3
ча. Поскольку момент t принадлежит второму интервалу и последующие пе- реключения в такте управления отсутствуют, заданное значение тока i(T) не учитьшается.
Когда сумма S,+S становится рав Sj, производят запирание силового ключа. Поскольку интеграл от тока i
за такт управления равен S , средонее значение ij за такт управления
(так как T const) не зависит от напряжения питания, т.е. обеспечивается высокая точность стабилизации. Одновременно поскольку значение тока в конце такта управления мало
Ч(т)
отличается от заданного значения
i (Т), обеспечивается устойчивость Процесса управления. Значения напряжения питания и параметров нагрузки при этом могут быть любыми.
Значение i,(Т) либо остается постоянным и определяется при расчете ИП, если среднее значение тока i, тре
5
0
В исходном состоянии на прямом выходе ПЭ действует сигнал, замыкающий ключи 13 и 15, инверсным сигналом ПЭ разомкнуты ключи 14 и 16.
На входе ПЭ действует сигнал S (t). Когда этот сигнал становится равным О, ПЭ срабатывает и переключает все ключи в Противоположное состояние, Интервал f, сформирован.
Сигнал S(t) отключается от входа ПЭ, подключается разность (), получаемая с помощью сумматора и в интервале t c(t, Т) имеющая положительное значение. Когда эта разность становится равной нулю, ПЭ переключается в исходное состояние, интервал i сформирован. В интервале t e(t,T) интегратор ключом устанавливается в нулевое исходное состояние.
Дапее цикл повторяется. Управление ключом 1 силового каскада производится сигналом, снимаемым с прямого выхода ПЭ. . 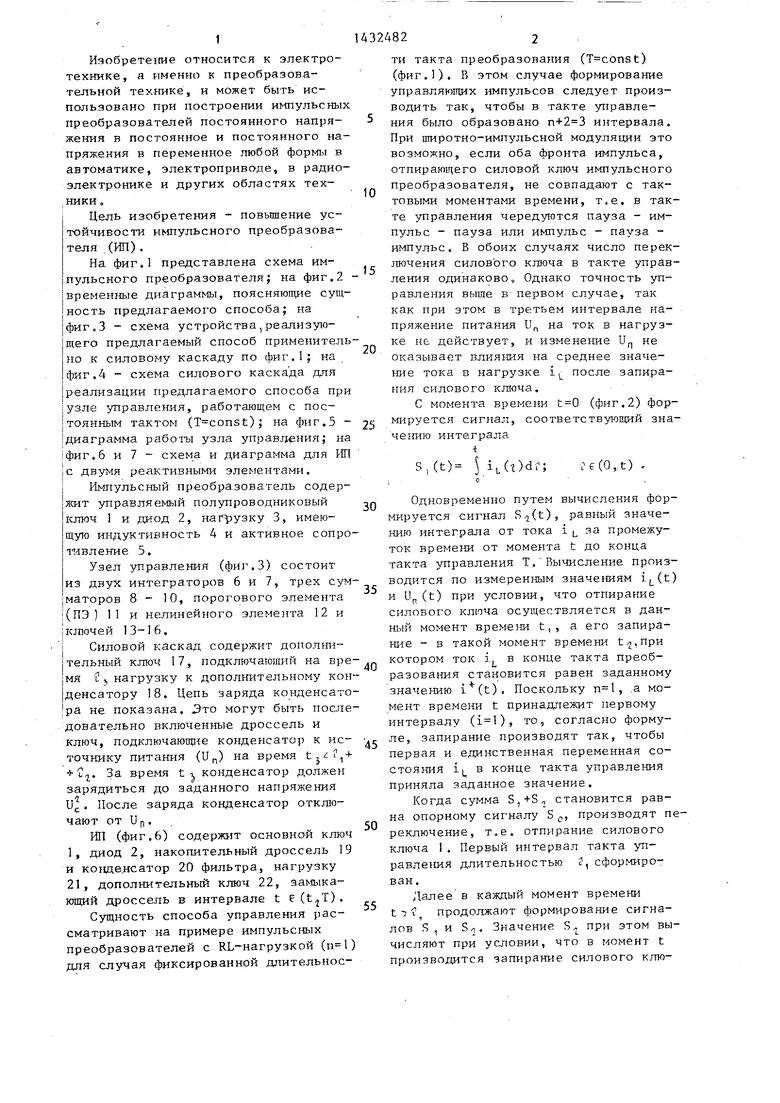
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления импульсным стабилизатором | 1985 |
|
SU1495770A1 |
| Способ управления импульсным стабилизатором среднего значения выходной переменной с последовательно включенными силовым ключом и непрерывной частью | 1984 |
|
SU1238046A1 |
| Способ управления импульсным преобразователем постоянного напряжения | 1984 |
|
SU1262656A1 |
| Импульсный преобразователь напряжения | 1989 |
|
SU1677699A1 |
| Импульсный регулятор тока для активно-индуктивной нагрузки | 1988 |
|
SU1644108A1 |
| Способ управления импульсным преобразователем напряжения | 1989 |
|
SU1746369A1 |
| Способ регулирования тока нагрузки вентильного преобразователя | 1985 |
|
SU1304148A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| СПОСОБ УПРАВЛЕНИЯ МОСТОВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 1993 |
|
RU2093949C1 |
Изобретение откосится к способам управления импульсными преобразователями постоянного напряжения. Цель изобретения - повьш1ение устойчивости импульсного преобразователя. Цель достигается тем, что управляющие импульсы форьшруют таким образом, чтобы в такте управления было образовано п+2 интервалов в случае фиксированной длительности такта управления и п+1 интервалов в случае нефиксированной длительности такта управления, при этом вычисление значения интеграла от выходной переменной за промежуток от текущего момента времени, принадлежащего i-му интервалу такта управления, до конца такта производят при условии, что очередное переключение силовьпс ключей производят таким образом, чтобы при измеренном теку- S щем значении напряжения питания любые n+1-i переменные состояния в конце такта управления приняли эаданиле значения. 7 ил. (Л
В регуляторе после заве реходных процессов, связан воначальным включением, ус ется процесс, в котором ср
ооптт/ пт ТТ
Фор м .у ла изобре
буется стабилизировать на постоянном 25 уровне, либо изменяется в соответствии с изменением опорного сигнала, если среднее значение тока i требуется изменять. В обоих случаях значение it(T) задается устройством, внеш- зО e™s тока не зависит от U ним по отношению к устройству управления, формирующему сигнал управления силовым ключом.
Условие 1,(Т) 1ц(Т) точно выполнять не требуется, поэтому все вычисления, необходимые для формирования
интервалов такта управления, можно производить приблизительно, используя типовые аналоговые микросхемы. Точно должно производиться только вы- 40
35
Способ управления полуп вым преобразователем посто пряжения, основанный на ши пульсной модуляции сигнала ния силовыми ключами, заклю в том, что измеряют текущи напряжения питания и п ных состояния преобразов .каждом такте управления фор сигнал, соответствуюпщй зн теграла от выходной переме с тервал от начала такта упр текущего момента времени, но с учетом текущих значени . жения питания, переменных и математической модели пр теля вычисляют значения ин выходной переменной за пром текущего момента времени д такта управления, сравниваю обоих интервалов с опорным и в момент достижения указ мой опорного сигнала произ реключение силовых ключей, чающийся тем, что, повышения устойчивости, уп
числение интеграла в последнем интервале, так как точность этого вычисления прямо определяет точность стабилизации среднего значения тока
ЧУзел управления работает следующим образом.
На выходе интегратора 6, охваченного отрицательной обратной связью, формируется сигнал i . Второй интегратор формирует сигнал, пропорциональный S(t). На выходе нелинейного элемента 12 формируется сигнал
4 -. 1 ei In р
- - о
На выходе сумматора 8 образуется сигнал, пропорциональный сумме трех интегралов
s(t)(t))+sr
В регуляторе после завершения переходных процессов, связанных с первоначальным включением, устанавливается процесс, в котором среднее знаооптт/ пт ТТ
Фор м .у ла изобретения
e™s тока не зависит от U
0
5
Способ управления полупроводнико- вым преобразователем постоянного напряжения, основанный на широтно-им- пульсной модуляции сигнала управления силовыми ключами, заключающийся в том, что измеряют текущие значения напряжения питания и п переменных состояния преобразователя, в .каждом такте управления формируют сигнал, соответствуюпщй значению интеграла от выходной переменной за ин- с тервал от начала такта управления до текущего момента времени, одновременно с учетом текущих значений напря- . жения питания, переменных состояния и математической модели преобразователя вычисляют значения интеграла от выходной переменной за промежуток от текущего момента времени до конца такта управления, сравнивают сумму обоих интервалов с опорным сигналом и в момент достижения указанной суммой опорного сигнала производят переключение силовых ключей, отличающийся тем, что, с целью повышения устойчивости, управляющие
0
5
lln, UH
IB
Uc :4 Un
-Д
ТП
Ч i
R
игМ
i%
4
2 (-н
I UH
м
JL
Фиг.в
. «
«З .9
С
Фиг.
| Способ регулирования выходного напряжения преобразователей постоянного напряжения в постоянное | 1983 |
|
SU1091283A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Мелешин В.И., Опадчий Ю.Ф., Моин В.В | |||
| Улучшение динамических свойств ключевых ВИП | |||
| - ЭТвА, 1980, вып.11,с.105-112, рис.3. | |||
