3. /
Изобретение относится к машиностроению и может быть использовано в промышленных роботах при автоматизации технологических нроцессов.
Цель изобретения - расширение технологических возможностей.
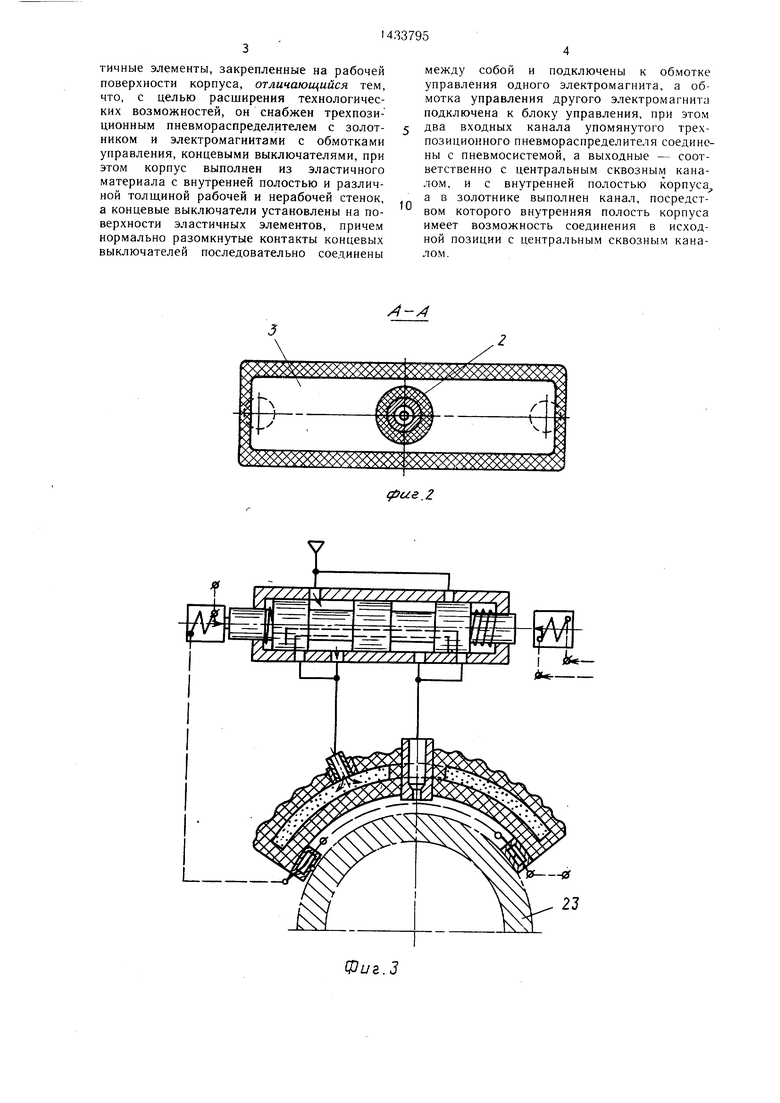
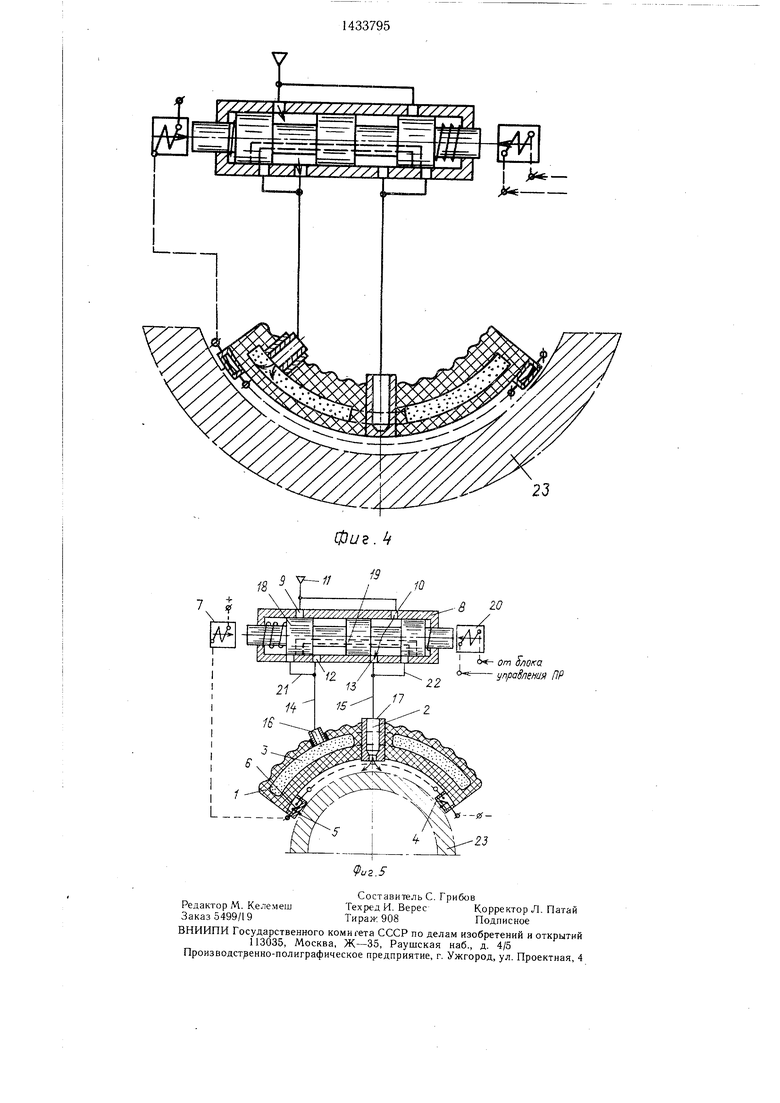
На фиг. 1 показан захватный орган, исходная позиция; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - захватный орган при захвате по выпуклой поверхности детали; на фиг. 4 - то же, при захвате по вогнутой поверхности детали; на фиг. 5 - то же, основная рабочая позиция (позиция удерживания детали).
Захватный орган состоит из корпуса 1, выполненного из эластичного материала с различной толщиной рабочей и нерабочей стенок. При конструктивном исполнении стенок корпуса с (фиг. 1) возможно использование для захвата только по выпуклым поверхностям деталей (фиг. 3). При выполнении корпуса с соотношением толщин стенок а.в возможно использование захватного органа для захвата только по вогнутым поверхностям деталей (фиг. 4).
Корпус 1 имеет центральный сквозной капал 2, внутреннюю полость 3, изолированную от центрального сквозного капала 2, эластичные элементы 4, внутри которых расположены концевые выключатели 5, нормально разомкнутые контакты 6 которых соединены между собой и с обмоткой управления электромагнита 7 трехпозициоп- пого пневмораспределителя 8, входные каналы 9 и 10 которого соединены с пнев- мосистемой 11, а выходные 12 и 13 ли- пия.ми 14, 15 - соответственно с входами 16 и 17 внутренней полости 3 и центрального сквозного канала 2. В золотнике 18 распределителя 8 выполнен капал 19, посредством которого полость 3 и отверстие 2 корпуса 1 соединены между собой в исходной нейтральной позиции распределителя 8. Обмотка управления электромагнита 20 связана с блоком управления промыщленного робота (ПР). Линии 21 и 22 -соединяют попарно выходные каналы пневмораспределителя 8. . Деталь позиция 23.
Устройство работает следующим образом.
В исходном состоянии обмотки управления электромагнитов 7 и 20 распределителя 8 обесточены и последний занимает исходную позицию (фиг. 1). Пневмо- система II перекрыта золотником 18. Внутренняя полость 3 посредством линий 14 и 21, каналов 19 в золотнике 18, линий
22и 15 -соединена с центральным сквозным каналом 2 и атмосферой. При подводе корпуса захватного органа к детали
23произвольной формы сигналом от блока управления промышленного робота запи- тывается обмотка управления электромагнита 20 распределителя 8, золотпик 18 переме
щается в крайнее левое положение и зани- .мает одну из рабочих позиций (фиг. 3). При этом пневмосистема 11 через входной канал 9 распределителя 8, выходной
канал 12, линию 14, входное отверстие 16 соединяется с внутренней полостью 3. Давление в этой полости возрастает и за счет разной толщины стенок () корпус I деформируется, плавно охватывая деталь 23. В момент касания эластичных элементов 4 поверхности детали 23 конечные выключатели 5 срабатывают и замыкают соответствующие контакты 6, подсоединяя обмотку управления электромагнита 7 к цепи питания и отключая (через блок управ2 ления роботом) обмотку управления электромагнита 20. Золотник 18 распределителя 8 занимает правое крайнее положение (фиг. 5), запирая внутреннюю полость 3 и оставляя корпус 1 в дефор.мированпом (по форме детали) состоянии. Одновременно с этим
0 пневмосисте.ма 11 через входной канал 10, выходной канал 13, пневмолинию 15 соединяется с центральным сквозным каналом 2 корпуса 1. При истечении струи воздуха из канала 2 в направлении захватываег мой детали 23 в пространстве между корпусом захватного органа и деталью образуется разре.жение, в результате чего возникает активная подъемная сила, стремящаяся прижать корпус к летали. Деталь еще плотнее прилегает к эластичным элеQ ментам 4, после чего осуществляется ее транспортировка. Для реализа1чии разжима детали по команде от блока управления золотник 18 распределителя 8 переводится в исходное положе ие (фиг. 1). При этом пневмосистема 11 перекрывается, а
5 внутренняя полость 3 посредством каналов 19 в золотнике 18 соединяется с центральным сквозным каналом 2 и атмосферой. Эластичный корпус 1 при отсутствии избыточного давления в полости 3 плавно разжимается и принимает свою первона чальную форму. В дальнейшем по сигналу, от блока управления роботом корпус захватного органа подводится к следующему изделию и вновь повторяется уже описанный цикл захвата, транспортировки и
2 освобождения детали.
Предложенная конструкция захватного органа значительно расширяет технологические воз.можности про.мыщленных роботов и может использоваться для захвата и 0 транспортировки как плоских (листовых), так и объемных без какой-либо переналадки. При этом весь цикл работы схва- та легко автоматизируется.
Формула изобретения
Захватный орган, содержан ий корпус с центральным сквозны.м каналом, соединяющим пневмосистему с атмосферой, и эластичные элементы, закрепленные на рабочей поверхности корпуса, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен трехпози- ционным пневмораспределителем с золотником и электромагнитами с обмотками управления, концевыми выключателями, при этом корпус выполнен из эластичного материала с внутренней полостью и различной толщиной рабочей и нерабочей стенок, а концевые выключатели установлены на поверхности эластичных элементов, причем нормально разомкнутые контакты концевых выключателей последовательно соединены
между собой и подключены к обмотке управления одного электромагнита, а обмотка управления другого электромагнита подключена к блоку управления, при этом два входных канала упомянутого трех- позиционного пневмораспределителя соединены с пневмосистемой, а выходные - соответственно с центральным сквозным каналом, и с внутренней полостью корпуса а в золотнике выполнен канал, посредством которого внутренняя полость корпуса имеет возможность соединения в исходной позиции с центральным сквозным каналом .
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ | 2008 |
|
RU2379556C1 |
| Способ извлечения деталей из кассеты и устройство для его осуществления | 1989 |
|
SU1773680A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДАВЛЕНИЕМ СЖАТОГО ВОЗДУХА С РЕЗЕРВИРОВАНИЕМ ПО УПРАВЛЯЮЩЕМУ ВОЗДЕЙСТВИЮ | 2015 |
|
RU2662333C2 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| ГИДРОЦИЛИНДР ДВОЙНОГО ДЕЙСТВИЯ | 1991 |
|
RU2022732C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН ПНЕВМОРАСПРЕДЕЛИТЕЛЯ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2242663C1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| Ковш скрепера | 1990 |
|
SU1756600A1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах при автоматизации технологических нроцессов. Целью изобретения является расширение технологических возможностей. Для этого корпус 1 выполнен из эластичного материала с внутренней полостью 3 и различной толш.иной рабочей и нерабочей стенок. Сквозной канал 2 и внутренняя полость 3 корпуса J соединены с выходными каналами трехпози- ционного пневмораспределителя 8, снабжен// ного золотником 18 и электромагнитами 7, 20 с обмотками управления. Нормально разомкнутые контакты 6 концевых выключателей 5 соединены последовательно и подключены к обмотке управления электромагнита 7. В исходной позиции внутренняя полость 3 соединена со сквозным каналом 2 при помопли канала 19, выполненного в золотнике 18. При захвате детали на обмотку управления электромагнита 20 подается сигнал от блока управления. Золотник 18 зани.мает крайнее левое положение, соединяя внутреннюю полость 3 с пневмосистемой 11. За счет различной толшины стенок корпус 1 деформируется. При контакте концевых выключателей 5 с поверхностью детали золотник 18 перемещается вправо, соединяя сквозной канал 2 с пневмосистемой 11. Между деталью и корпусом 1 образуется разрежение. Деталь прижимается к эластичным элементам 4 и надежн удерживается. 5 ил. S сл / /С 2О оо со ;о СП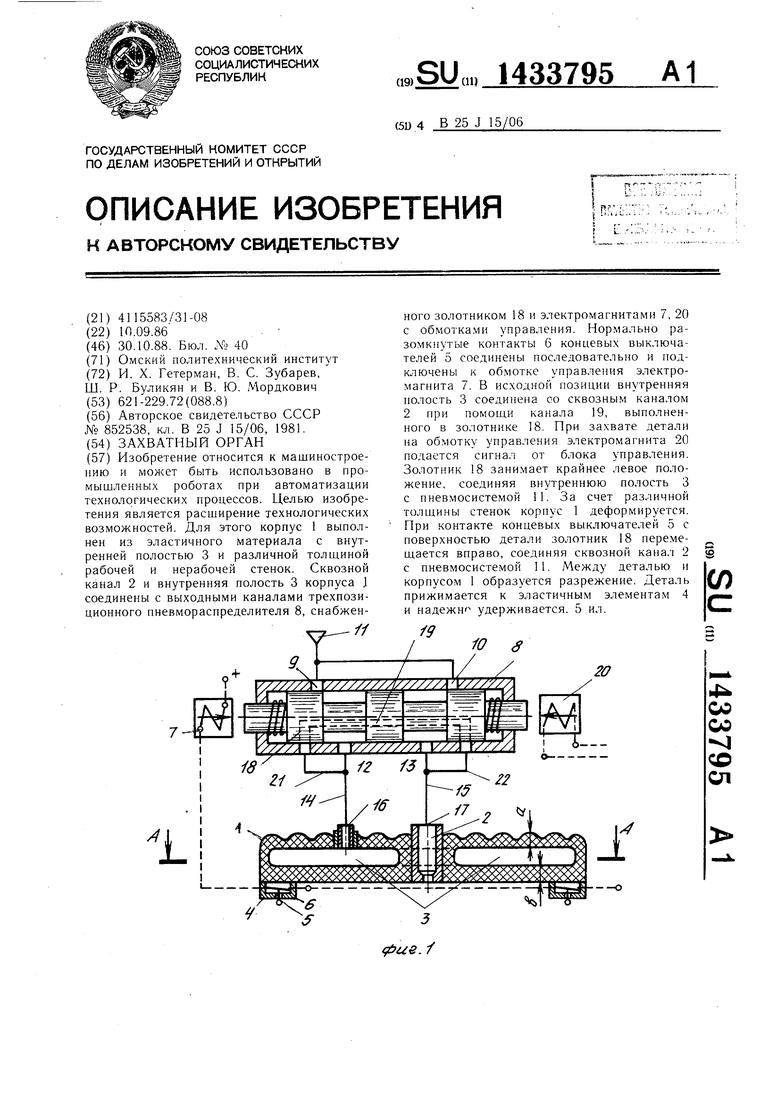
.Z
Фиг.З
фиг.
23
1Q
от Емка ijnpaSnfHU ПР
| Присоска для захвата и транспортировкидЕТАлЕй | 1979 |
|
SU852538A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
