Предполагаемое изобретение относится к технологической оснастке для механизации и автоматизации вспомогательных технологических операций и может быть использовано в промышленных роботах с пневматическим приводом рабочих органов.. . .. . . .
Известен захват манипулятора, содержащий корпус с магнитом. Захват сложен по конструкции, т.е. имеет дополнительные устройства для контроля и регулировки величины магнитного потока.
Наиболее близким к предполагаемому является захват манипулятора, снабженный пневмосистемой и эластичной рубашкой, в которой установлен полый корпус с магнитом, причем в теле магнита выполнены сквозные отверстия, связанные.с пневмосистемой.
Недостатками этого захвата являются низкие технологические возможности, а именно невозможность захвата неферромагнитных деталей, недостаточная грузоподъемность и отсутствие ее регулирования.
Цель изобретения - расширение технологических возможностей за счет повышения удерживающей силы, возможности ее регулирования и захвата неферромагнитных деталей. .
Поставленная цель достигается тем, что в пневмосистему введено пневматическое распределительное устройство, которое состоит из пневмоцилиндра двустороннего действия, жестко закрепленного на непод-. вижном полом штоке, имеющем расшире- ние на выходе. Распределительное устройство обеспечивает попеременную подачу и отсос воздуха из полости захвата.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием пневматического распределительного устройства, состоящего из пневмоцилиндра двустороннего действия с расширяющимся конусом на выходе и двумя парами сопел, перекрывающимися попеременно поршнем.:
Сравнение заявляемого решения с другими техническими решениями показывает, что пневмоц илиндры двустороннего действия широко известны. Однако при жестком закреплении его на неподвижном полом штоке, имеющем расширяющийся конус на выходе, а на цилиндрической части выполненные под углом 45-50° к продольной оси две пары сопел, направленные в разные стороны, перекрывающиеся попеременно поршнем, возможно повысить и регулиро- вать удерживающую силу, а также производить захват устройством неферромагнитных деталей,
На чертеже представлено захватное устройство манипулятора.
Устройство содержит полый корпус 1, Внутри корпуса установлен постоянный магнит 2, а снаружи эластичная рубашка 3. Для присоединения захвата к промышленному роботу используется переходная планка 4. Корпус 1 через патрубок 5, хомуты 6 и выводную трубу 7 соединен с распределительным устройством, которое представляет из себя пневмоцилиндр двустороннего действия. Распределительное устройство
состоит из крышек 8, 9, гильзы 10, шпилек 11, поршня 12, полого штока 13, в котором выполнены сопла 14, 15 под углом к продольной оси 45-50°, направленные в разные стороны. На конце полого штока
имеется расширительная камера 16. Для подачи сжатого воздуха в полости пневмоцилиндра в крышках 8, 9 установлены штуцера 17, 21. С помощью болта 18 осуществляется фиксация пневмоцилиндра
на штоке 13. Для уплотнения крышек 8, 9 поршня 12 используются уплотнительные кольца 19.
Устройство работает следующим образом. Промышленный робот опускает захват
на деталь 20, которая захватывается силой постоянного магнита. Одновременно в момент опускания захвата сжатый воздух подается через штуцер 21 в полость пнсамоцилиндра. Через сопла 15 сжатый
воздух устремляется в полый шток 13. За счет эжектирующего действия струи начинается отсос воздуха из полости захватного устройства, т.е. создается дополнительная удерживающая сила, Затем промышленный
робот переносит деталь на позицию установки. Для освобождения захвата от детали воздух подается через штуцер 17 в другую полость пневмоцилиндра и перемещает поршень 12 до упора в выступ крышки 9.
Одновременно прекращается подача воздуха через штуцер 21. Поршень, перемещаясь до упора в крышку 9, перекрывает сопла 15 и открывает сопла 14, в которые устремляется сжатый воздух и проходит в полость
захвата через отверстия 2, освобождая деталь от удерживающих сил;
Применение предлагаемого устройства позволит захватывать неферромагнитные детали, при захвате ферромагнитных деталей создавать дополнительную удерживающую силу за счет разряжения в полост захвата, которую можно регулировать. Расширяется номенклатура и масса захватываемых деталей.
Формула изобретения Захват манипулятора, содержащий корпус с установленным в нем магнитным за- хватным элементом, на боковой поверхности которого и коэксиально ему ус- |ановлен другой захватный элемент, выполненный в виде вакуумной присоски, полость Которой посредством каналов, выполненных в магнитном захватном элементе, соединена с вакуумной системой, снабженной Нневмораспределителем, о т л и ч а ю щ и й- 0 я тем, что, с целью повышения быстродействия, магнитный захватный элемент выполнен в виде постоянного магнита, а пнев- мораспределитель выполнен в виде пневмоцилиндра двустороннего действия, жестко закрепленного на неподвижном штоке, причем шток выполнен полым и имеет расширяющийся конус на выходе, а на цилиндрической части штока под углом 45- -50° к продольной оси выполнены две пары каналов, направленных в разные стороны и имеющих возможность попеременного перекрытия поршнем.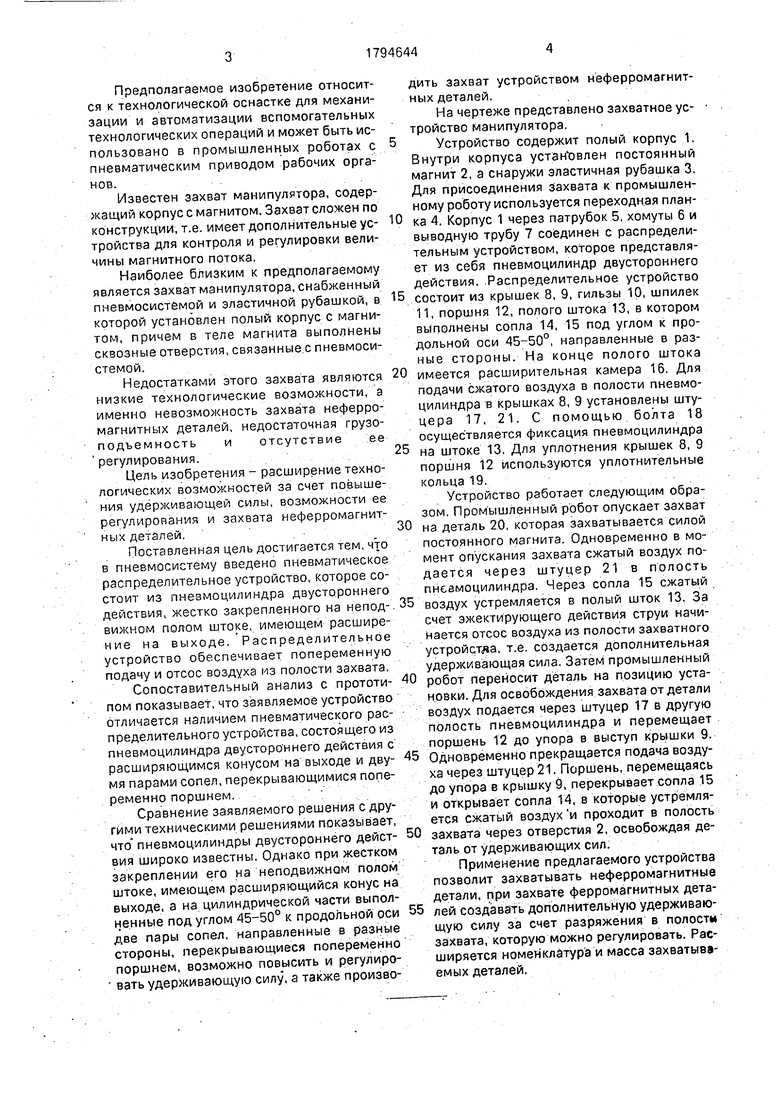
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Манипулятор | 1980 |
|
SU921850A1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
Использование: машиностроение, в за- хват|ных органах промышленных роботов. Сущность изобретения: захват содержит корпусе установленными на нем захватными элементами. Причем один захватный элемент выполнен в виде постоянного МЗР- нит( 2, а другой - в виде вакуумной присоски; 3. При этом вакуумная присоска установлена из боковой поверхности посто- яннрго магнита коаксиально ему. В постоя нп юз „,,.,.. -Л ,--, ,,JL, 7 ч v Щ ном магните выполнены.каналы, соединяющие полость присоски с вакуумной системой. Вакуумная система снабжена пневмораспределителем. При этом пневмо- распределитель выполнен в виде пневмоци- линдра двухстороннего действия. Пневмоцилиндр жестко закреплен на полом штоке 13. На выходе штока 13 выполнен расширяющийся конус, а на цилиндрической части штока выполнены под углом от 45 до 50° две пары каналов , которые направлены в разные стороны и имеют возможность попеременного перекрытия поршнем. За счет этого создается либо разрежение в полости присоски для захвата детали, либо повышенное давление в ней для сброса детали. 1 ил. ел С
| Грузозахватное устройство | 1983 |
|
SU1142409A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
