17
ФЮ-З
1
Изобретение относится к строитель |Ной технике и может быть использован ;для вытрамбовьтания котловацов при возведении фундаментов зданий и сооружений.
Цель изобретения - повьшение надежности и снижение энергоемкости
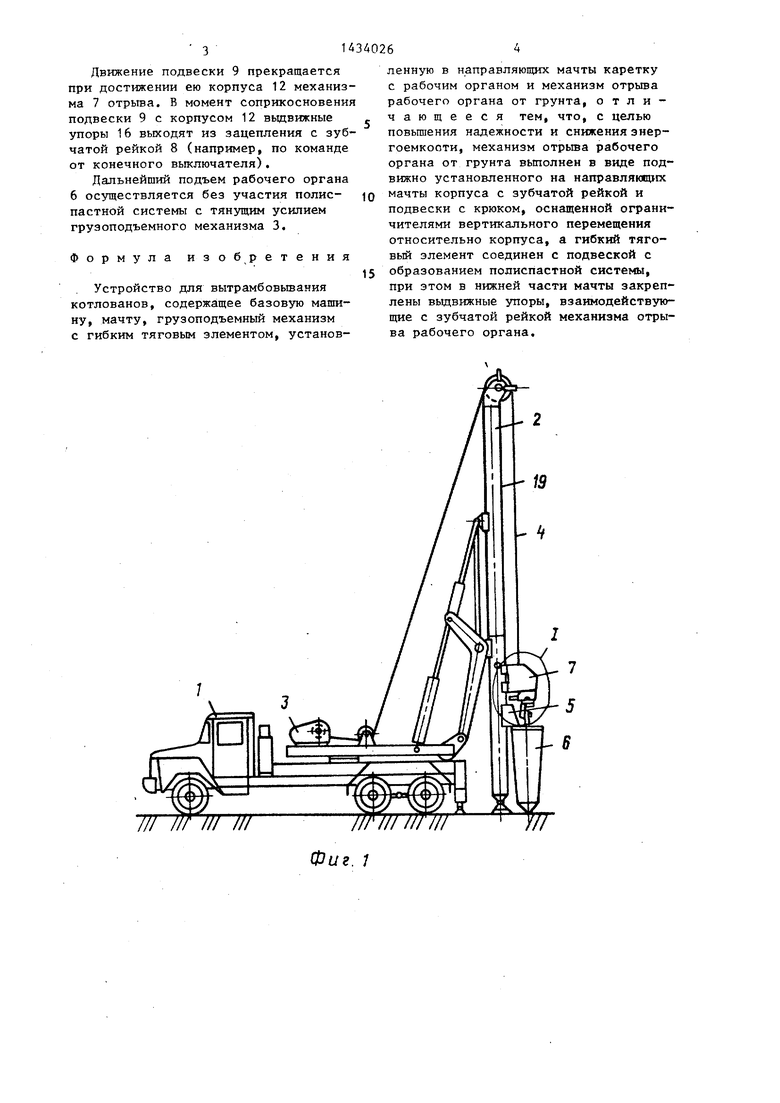
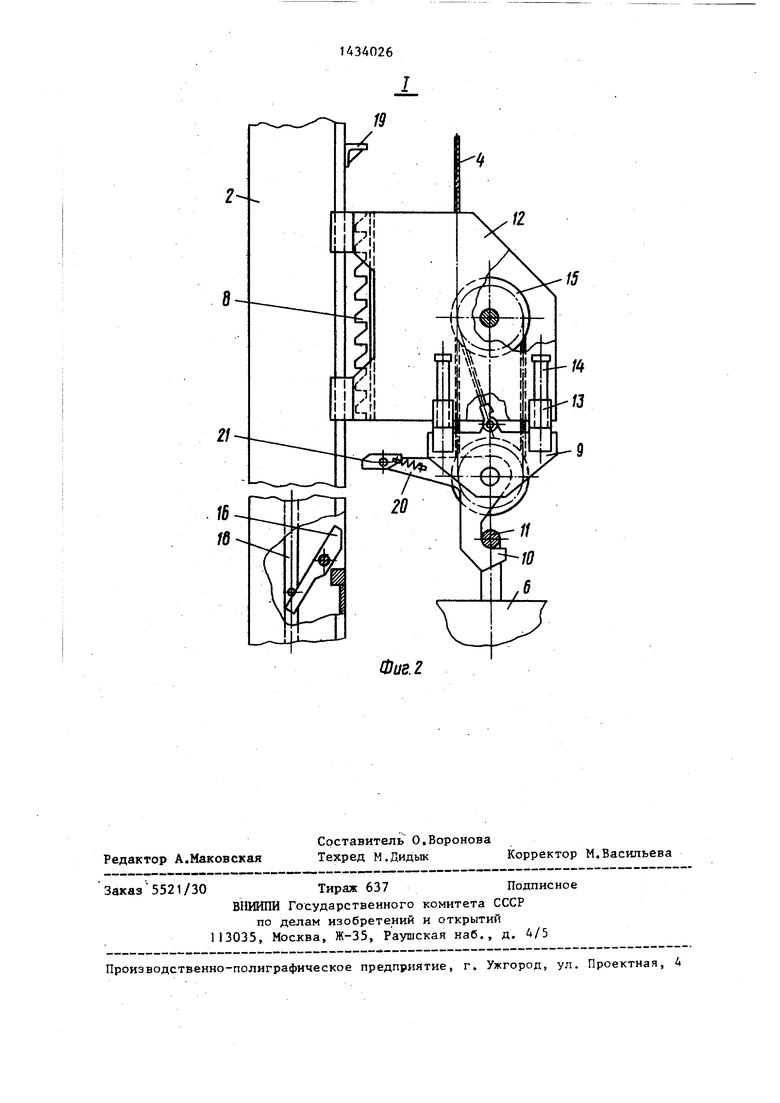
На фиг.1 представлено описываемое устройство, общий вид; на фиг.2 - узел I на фиг.1 (устройство в момент подъема каретки с рабочим органом); |на фиг.З - то же, устройство в момен |отрьта рабочего органа от грунта. Устройство для вытрамбовывания ;котлованов содержит базовую машину 1 i(например, шасси автомобильное) с I мачтой 2 и грузоподъемный механизм |3 с гибким тяговым элементом 4. В на правляющих мачты установлены каретки |5 с жестко закрепленным рабочим ор- |ганом 6 и механизм 7 отрьюа с зубча- |той рейкой 8 и повеской 9 с шарнирно ;закрепленным крюком 10, На рабочем : органе 6 установлена петля 11 для со единения с крюком 10. Зубчатая рейка 8 жестко закреплена на корпусе 12 механизма 7 отрыва, а подвеска 9 уста- |Новлена в направляющих 13, закреплен |ных на корпусе 12, и соединена с ним ;ограничителями 14 вертикального перемещения и гибким тяговым элементом 4 с образованием полиспастной системы :15. Нижней подвижной обоймой этой си :стемы является подвеска 9 с крюком |10, а верхней (неподвижной) - корпус |12 механизма 7 отрьгеа, Полиспастная Ьистема служит для увеличения усилия трыва рабочего органа 6 от грунта, Зависящего от грунтовых условий и оп- )еделяемого количеством блоков, установленных на нижней и верхней обоймах полиспастной системы.
Направляющие 13 служат для направленного перемещения подвески 9 с целью обеспечения зацепления крюка 10 с петлей 11 рабочего органа 6.
В нижней части мачты 2 установлены выдвижные упоры 16, связанные между собой и с гидроцилиндром 17 тягой 18. Профиль выдвижных упоров выбирается соответствунмцим профилю зубчатой рейки 8 для обеспечения зацепления с последней при включенном гщфоцилиндре 17. Количество и шаг упоров 16 назначаются исходя из условия зацепления с зубчатой рейкой 8 от начала до полного погружения рабочего органа 6 в грунт.
fO
15
20
5
0 5
0
5
0
5
Для автоматического расцепления рабочего органа 6 с механизмом 7 отрыва в верхней части мачты 2 установлены упоры 19, а на крюке 10 подвески 9 жестко закреплен рычаг 20 с подпружиненным флажком 21,
Устройство работает следующим образом.
Маневрируя базовой маминой 1 и мачтой 2, рабочий орган устанавливают над точкой вытрамбовывания. Грузоподъемным механизмом 3 посредством гибкого тягового элемента 4 производят подъем механизма 7 отрьгоа с зацепленным с ним рабочим органом 6, при этом подвеска 9 под действием сил натяжения в гибком тяговом элементе 4 упирается в нижнюю часть корпуса 12 и подъем производится с тянущим усипием грузоподъемного механизма 3.
При достижении заданной высоты сбрасывания грузоподъемный механизм 3 переключают на ход вниз. При движении механизма 7 отрыва флажок 21 взаимодействует с упором 19, поворачиваясь при неизменном положении рычага 20, а при ходе вниз флажок 21, набегая на упор 19, поворачивает рычаг 20 с крюком 10 и освобождает от зацепления рабочий орган 6, которьй падает, заглубляясь в грунт. Механизм 7 отрыва продолжает опускаться до соприкосновения крюка 10 с петлей 11 рабочего органа fi. Далее включается гидроцилиндр 17 вьщвижных упоров 16, при этом вьщвижные упоры 16 занимают горизонтальное положение и входят в зацепление с зубчатой рейкой 8,
I
Корпус 12 механизма 7 отрьта прекращает движение, а подвеска 9 (нижняя обойма полиспастной системы) продолжает двигаться вниз под действием собственного веса до зацепления крюка 10 с петлей 11 рабочего органа 6. Затем начинается процесс отрыва рабочего органа 6 от грунта, при этом подвеска 9, поднимаясь и воздействуя на рабочий орган 6 через крюк 10 с усилием, превьипающим усилие грузоподъемного механизма 3, отрывает рабочий орган 6 от грунта, в то время как верхняя обойма полиспастной системы (корпус 12 механизма 7 отрыва) посредством зубчатой рейки 8 и выд- вижных упоров 16 опирается на нижнюю часть мачты 2.
/// /// /// ///
/// /// /// ///
Фиг. 7
Фи8.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вытрамбовывания котлованов | 1983 |
|
SU1135840A1 |
| Гидравлический копер для вытрамбовывания котлованов в грунте | 1989 |
|
SU1715977A1 |
| Устройство для вытрамбовывания котлованов | 1981 |
|
SU983187A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Установка для вытрамбовывания котлованов | 1987 |
|
SU1442611A1 |
| Устройство для образования скважин в грунте | 1978 |
|
SU685764A1 |
| Установка для разработки грунта | 1985 |
|
SU1323670A1 |
| Навесное оборудование к стреловому крану для извлечения свай | 1975 |
|
SU580271A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| Захват для изделий | 1979 |
|
SU918246A1 |
Изобретение относится к строительной технике. Цель изобретения повышение надежности и снижение энергоемкости. Устройство содержит базовую машину с мачтой 2, грузоподъемный механизм, каретку с рабочим органом 6 и механизм отрьта рабочего органа. Механизм отрыва рабочего органа выполнен в виде подвижно установленного на направляющих мачты корпуса 12 с зубчатой рейкой 8 и подвески 9 с крюком 10о Подвеска соединяется с корпусом 12 механизма отрыва ограничителями вертикального перемещения 14 и гибким тяговым элементом 4 с образованием полиспастной системы 15, Усилие при отрьше рабочего органа 6 от грунта через зубчатую рейку 8 кор- g пуса 12 и вьщвижные упоры 16 передается только на нижнюю часть мачты 2. 3 ил. (Л
| Устройство для вытрамбовывания котлованов | 1982 |
|
SU1141161A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для вытрамбовывания котлованов | 1983 |
|
SU1135840A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
