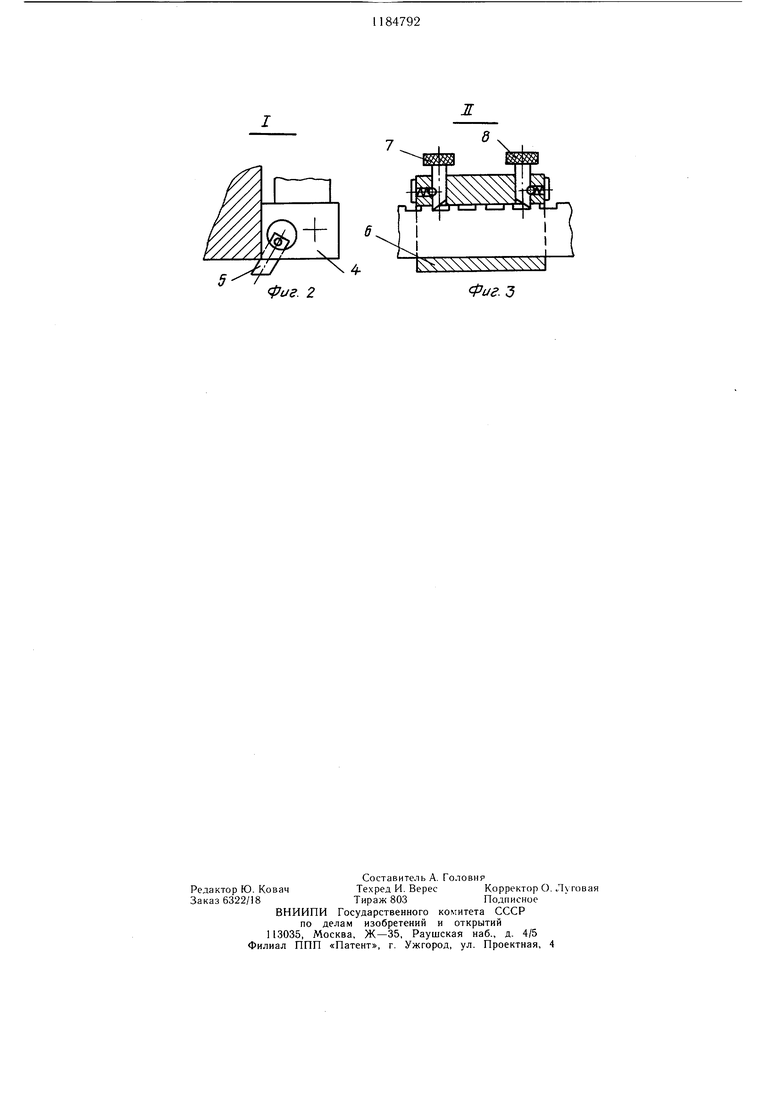
Изобретение относится к машиностроению и может быть использовано в областях, где применяются грузозахватные устройства. Цель изобретения - обеспечение надежного захвата грузов с гладкими стенками и повышение техники безопасности при работе захватного устройства путем соединения кареток, содержащих две храповые собачки, действующие в противоположных напраЕ лениях, с захватными органами через зубчатые рейки и щтанги, а с механизмом фиксации - через дополнительные распорки. Гибкие тяги, являющиеся приводом захватных органов, соединенные одним концом с траверсой, а вторым - с корпусом механизма фиксации, пропущены через блоки, установленные на раме у центральной оси. Захватные органы снабжены отверстиями, выполненными под углом 45° к горизонту, в которые вставлены с возможностью выдвига 1ия вниз до упора под действием силы тяжести выдвижные упоры. На фиг. 1 изображено предлагаемое автоматическое грузозахватное устройство, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. S - узел II на фиг. 1. Захватное устройство имеет раму 1, штанги 2, рейку 3, захватные органы 4, выдвижные упоры 5, каретки 6, храповые собачки 7 и 8, траверсу 9, гибкие тяги 10, ловитель 11, крюки 12 направляющий щтырь 13, колокол 14, конусное кольцо 15, распорки 16, корпус 17 механизма фиксации, центральный стержень 18 и блоки 19. Поднимаемый груз обозначен позицией 20. Грузозахватное устройство работает следующим образом. Грузоподъемным механизмом (не показан) траверса 9 опускается вниз, ловитель 11, закрепленный жестко на траверсе 9, охватывает направляющий штырь 13, который жестко соединен с колоколом 14 и корпусом 17 механизма фиксации, перемещающимся по центральному стержню 18. Крюки 12, закрепленные щарнирно на ловителе 11, опускаются своими зацепами ниже среза колокола 14. При подъеме траверсы 9 крюки 12, зацепив колокол 14, потянут корпус 17 и через распорки 16, каретки 6, собачки 7 и рейки 3 втянут щтанги 2 с захватными органами 4. При дальнейшем подъеме захватное устройство поднимается, после чего устанавливается в полость груза 20. Для захвата груза 20 траверсу 9 опускают до захвата крюками 12 конусного кольца 15, установленного с возможностью перемещения по корпусу 17 механизма фиксации. При подъеме крюки 12 подхватывают конусное кольцо 15 и поднимают до встречи с колоколом 14. Встретив сопротивление колокола 14, крюки 12 соскальзывают с конусной поверхности конусного кольца 15 и минуют колокол 14. При дальнейщем подъеме гибкие тяги 10 через блоки 19 подтягивают вниз корпус 17, который через распорки 16, каретки 6, собачки 8 и рейки 3 раздвигает штанги 2 с захватными органами 4, захватное устройство поднимается вместе с грузом. Выдвижные упоры 5 под действием силы тяжести выступают из своих гнезд под торец поднятого груза 20, препятствуя соскальзыванию груза с захватных элементов. Для освобождения груза 20 нужно крюками 12 захватить колокол 14 и поднять захватное устройство из полости груза. Для регулировки захватного устройства на меньший размер необходимо собачку 8 вывести из зацепления с рейкой 3, поднять траверсу 9, зацепив крюками 12 колокол 14. Корпус 17 потянет распорки 16 и через каретки 6 и собачки 7 подтянет рейки 3 со штангами 2. Опускаясь, траверса 9 нажимает на штырь 13, перемещает корпус 17 вниз, распорки 16 раздвигают каретки 6, собачки 7 скользят своими скосами по рейкам 3. При следующем подъеме корпуса 17 щтанги 2 снова подтягиваются. Раз.мер определяется по шкале, нанесенной на щтанге 2. Для регулировки устройства на больший размер необходимо вывести из зацепления собачки 7 и ввести в зацепление с рейками 3 собачки 8, подъемом и опусканием корпуса 17 раздвинуть щтанги на необходимый размер. Наличие реек с зубьями, соединенными со штангами, и кареток с храповыми собачками позволяет регулировать захватное устройство на размер с помощью грузоподъемного механизма, что особенно ценно для захватных устройств больщой грузоподъе.мности, содержащих захватные органы большой массы. Кроме того, возможность приблизить гибкие тяги к центру захватного устройства, что важно при использовании захватного устройства для установки грузов больших габаритов на планшайбы, карусельных станков. Выдвижные упоры, установленные в отверстиях, выполненных под углом (45°) в захватных элементах, и выступающие под действием силы тяжести под торец поднятого груза, позволяют повысить безопасность транспортировки грузов, препятствуя соскальзыванию груза с захватных элементов.
s 4фиг. 2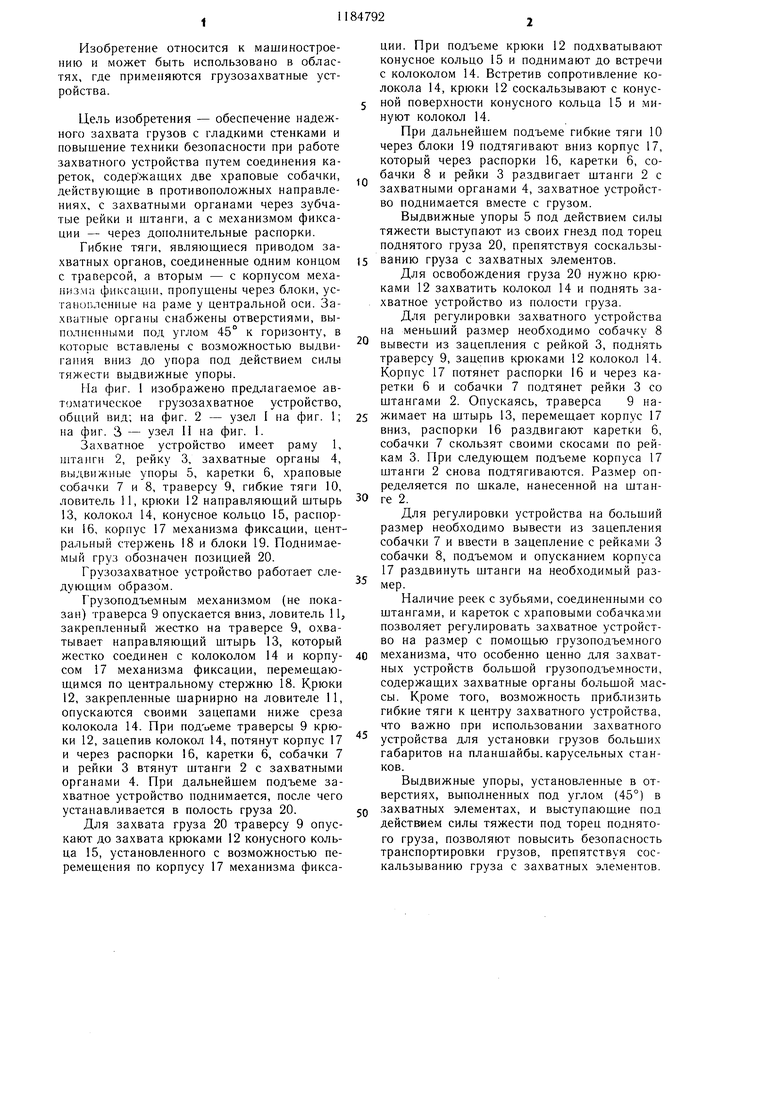
АВТОМАТИЧЕСКОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО, содержащее навешиваемую на крюк грузоподъемного механизма траверсу и раму с вертикальным стержнем, соединенным с механизмом фиксации положения захватных органов, связанных с расположенными на раме каретками, отличающееся тем, что, с целью повышения надежности устройства, захватные органы выполнены с горизонтальными зубчатыми рейками, на которых установлены каретки, снабженные двумя храповыми противоположно направленными собачками, а вертикальный стержень соединен с каретками посредством распорок. (Л 00 4ib :о to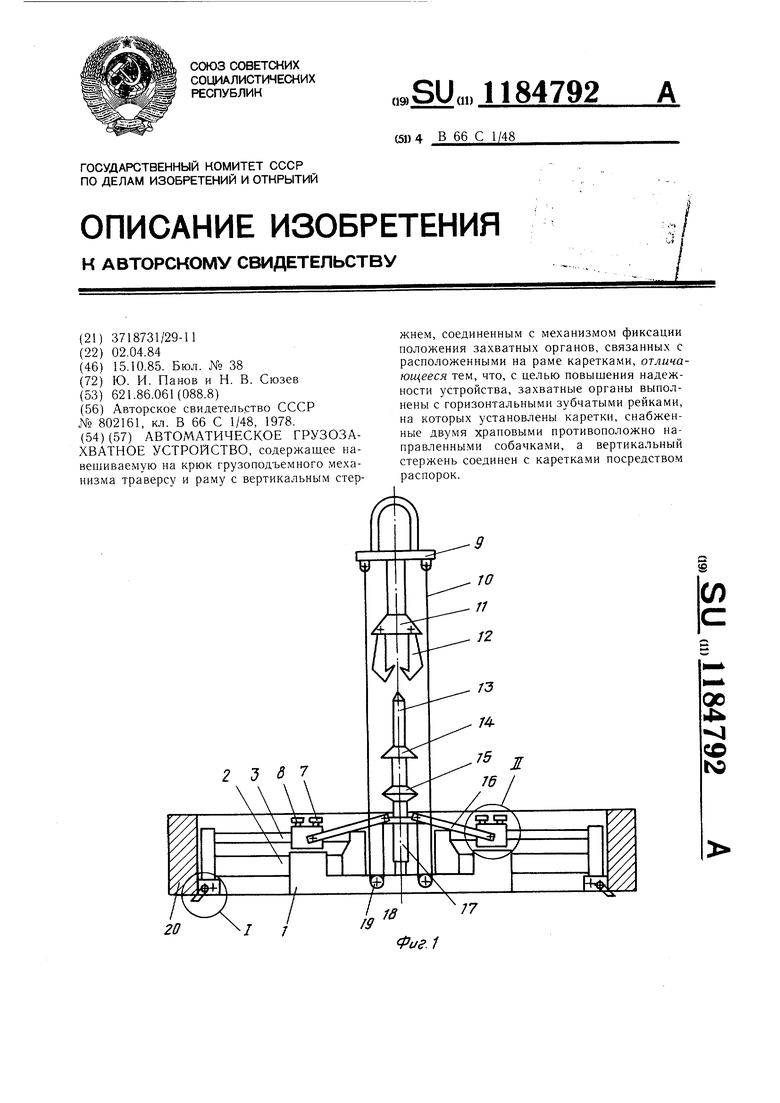
| Автоматическое захватное устройство | 1978 |
|
SU802161A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
