f3
-I fflf
со 00
05 Х)
ел
со
1138
Изобретение относится к системам управления автоматизированным электроприводом, а именно к системам автоматического регулирования частоты вращения электроприводами постоянного тока с применением цифровой техники.
Цель изобретения - повышение динамической точности системы цифрового регулирования.
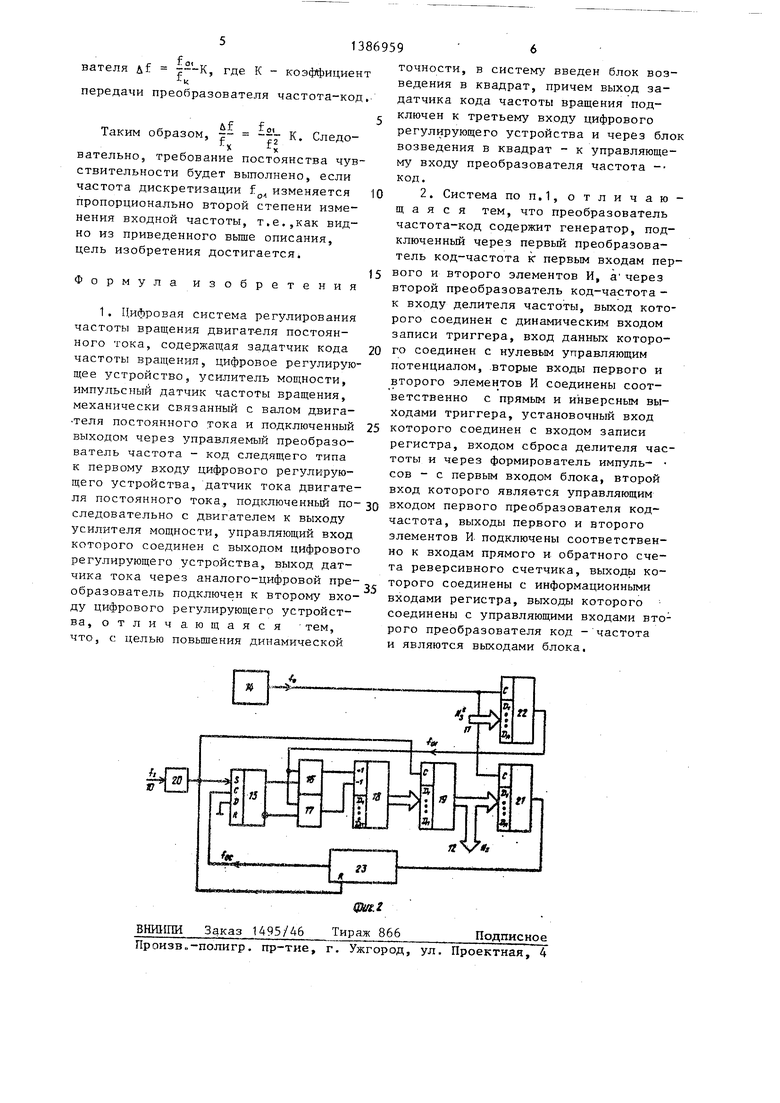
На фиг.1 представлена структура системы регулирования; на фиг.2 - схема управления преобразователя частота-код.
Система содержит задатчик 1 кода частоты .вращения, цифровое регулирующее устройство 2 с входом синхронизации и информационными входами, усилитель 3 мощности, выполненный как ти- ристс рный преобразователь со схемой управления, источник 4 силового напряжения, двигатель 5 постоянного то- ка, датчик 6 тока двигателя, импульсный датчик 7 частоты вращения, пре- образовате-ль 8 аналог-код, управляе- мый преобразователь 9 частота-код следящего типа, частотным входом 1C связанный с импульсным датчиком 7 скорости, вход 11 кода управления, выходную информационную шину 12 . и. устройство 13 возведения в квадрат.
Управляемый преобразователь 9 частота-код содержит генератор 14 частоты, D-триггер 15, первый 16 и второй 17 двухвходовые элементы И, реверсивный счетчик 18, регистр 19, формирователь 20 коротких, импульсов, первый 21 и второй 22 преобразователи код-частота и делитель 23 частоты
Цифровая система регулирования ра ботает следующим образом,
Система представляет собой двух- контурную ЦАСР частоты вращения двигателя с внешним контуром регулирова
ния частоты вращения и внутренним контуром регулирования тока якоря двигателя. .Алгоритмы регулирования закладываются в память цифрового регулирующего устройств.а, в том числе и микропроцессорного. Для обеспечени работы устройства 2 вся информация, поступающая на его входы, должна быть представлена в форме параллельного двоичного кода. Код задания значений частоты вращения вырабатывает- ся задатчиком 1, код значений тока якоря двигателя - датчиком 6 тока (шунт в якорной цепи) в сочетании с вторичным преобразователем В аналог
5 0 5 0
5
0
0
5
код, код истинных значении частоты вращения - импульсным датчиком 7 в сочетании с управляемым преобразователем 9 частота-код.
Регулирующее устройство 2 в соответствии с запрограммированным алгоритмом вычисляет код регулирующего- воздействия, управляющий работой ти- ристорного преобразователя 3 со схемой управления, включающей и схемы преобразования выходного кода устройства 2 в сигналы импульсно-фазового управления. Якорная цепь двигателя 5 подключена к выходам преобразователя 3, питающегося от источника 4 сотового напряжения. Цикличность работы регулирующего устройства синхронизируется по частоте и фазе переключений - переменного напряжения на анодах ти- ристорного преобразователя благодаря связи устройства 2 с источником 4 силового напряжения. В качестве сигнал. Датчика тока РЕспользуется напряжение, снимаемое с шунта в якорной цели дв .-т- гателя. .
Особенность работь системы заклгз чается в возможностях, которые связь- ны с применением специального управляемого преобразователя 9 частота-код, вход 11 управления которого связан с выходом датчика 1 через устройство 13 возведения в квадрат. Схема, представленная на фиг.2, является преобразователем частота-код следящего типа, в цепи обратной связи которого включены преобразователь 21 код-частота с делителем 23 частоты, а прямая ветвь выполнена в виде триггерного импульсно-фазового дискриминатора (триггер 15, элеме {ты И 16 и 17) в сочетании с цифровым интегратором на базе реверсивного счетчика 18 с регистром 19 промежуточной памяти. Мгновенное значение кода, записанное в счетчике 18, представляет собой интегральное рассогласование двух сравниваемых частот - частоты импульсов датчика частоты вращения f , поступаь щей через формирователь 20 коротких импульсов на S-вход триггера 15, и частоты, поступающей из цепи обратной связи преобразователя на С-вход 15.
Ылаг одаря применению в качестве триггера дискриминатора D-триггера исключается его сбой при совлгдении -гм п V л -j сон обе их част о т Б с в р е м е н к.
так как .определяющим всегда будет импульс по установочному входу. В синхронном следящем режиме
ре
1
i ос)
триггер 15 находится в жиме переключений с частотой f
(fx ре при
постоянстве скважности переключений. При нарушении равенства частот триггер 15 переключается с частотой, рав ной меньшей из сравниваемых частот, оставаясь по времени преимущественно в том состоянии, которое подтверждается импульсами большей из частот.
При f,i „
триггер преимуществен
но находится в состоянии единицы, устанавливаемом по S-входу. Различие в скважности напряжения на прямом и инверсном выходах триггера 15 и является тем признаком, кото.рьй используется в качестве сигнала рассогласования в описываемом следящем преобразователе .
На первые входы элементов И 16 и 17 подаются управляющие сигналы с выходов триггера 15. На их вторые входы подана выходная частота преобразователя 22 fд,. Таким образом, количество импульсов частоты fot , которые по- ступают через элементы И 16 и 17 на выходы сложения и вычитания реверсив- ног;о счетчика 18, пропорпиональны длительности пребьгоания триггера 15 в состоянии единицы или нуля соот- ветственно в каждом цикле его переключения. Перенос информации из счетчика 18 в регистр | 9 производится t каждой записи единицы в триггер 15 путем подачи короткого импульса раз- решения на С-вход регистра 19.
Если за время цикла переключения триггера разность в числе импульсов, поступивших на входы счетчика 18, не равна нулю, то значение управляю- щего кода, записанного в регистре 19, изменяется с учетом знака разности. Последнее приводит к пропорциональ
ному изменению частоты f на выходе преобразователя 21 код-частота. В качестве опорной для указанного преобразователя также используется частота генератора 14, Делитель 23 частоты включен на выходе преобразователя 21 и служит для сглаживания возможной неравномерности на его выходе, а также для настройки чувствительности всего устройства. Выбор коэффициента деления делителя 11 наряду с соотно
10
шением меткду значением частоты f, , коэффициентом преобразования преобразователя 21 и разрядностью счетчика 18 определяет чувствительность преобразователя.
Знак рассогласования, получаемого в счетчике 18, таков, что он способствует синхронизации частот f и f
В установившемся состоянии f.
ое
2
и значение управляющего кода на входе преобразователя 21, одновременно являющегося выходным кодом устройст- ва , снимаемым с выходной шины 12, оказывается строго пропорциональным входной частоте fx.
Высокая чувствительность схемы к
нарушению равенства частот
f If
- 2 ос
определяется фазовым характером слежения, позволяет ускорить реакцию замкнутой следящей системы на изменение частоты имщ льсного датчика скорости и тем самым повысить быстродействие и динамическую точность всего канала обратной связи. С целью стабилизации этих характеристик во всем диапазоне регулирования частоть; вращения двигателя в схему преобразователя частота-код введен второй преобразователь 22 код-частота, информационные входы которого через шину 11 связаны с выходом задатчика 1 кода скорости через устройство 13 возведения в квадрат. Выходная частота преобразователя 22 определяется так
,
0
где N.J - код задания скорости;
К - коэффициент пропорциональности (N.) .
Квадратичная зависимость частоты дискретизации f, фазы следования импульсов частот, сравниваемых фазовым дискриминатором, позволяет компенсировать квадратичное изменение чувствительности преобразователя частота- код при изменении входной частоты.
Действительно, требование постоянства чувствительности преобразоваAf
5 теля можно выразить как
т- const,
х
где л - разрешающая способность преобразователя частота-код, В то же время ИЗ принципа работы преобразователя if ,
k
где К - коэффициент передачи преобразователя частота-код.
Таким образом, - - К. Следо х fx
вательно, требование постоянства чувствительности будет выполнено, если частота дискретизации f изменяется пропорционально второй степени изменения входной частоты, т.е.,как видно из приведенного вьше описания, цель изобретения достигается.
Формула изобретения
1. Цифровая система регулирования частоты вращения двигат-еля постоянного тока, содержащая задатчик кода частоты вращения, цифровое регулирующее устройство, усилитель мощности, импульсный датчик частоты вращения, механически связанный с валом двига- теля постоянного тока и подключенный выходом через управляемый преобразователь частота - код следящего типа к первому входу цифрового регулирующего устройства, датчик тока двигателя постоянного тока, подключенный по- следовательно с двигателем к выходу усилителя мощности, управляющий вход которого соединен с выходом цифрового регулирующего устройства, выход датчика тока через аналого-цифровой преобразователь подключен к второму входу цифрового регулирующего устройства, отличающаяся тем, что, с целью повышения динамической
0
5
0
5
о
5
точности, в систему введен блок возведения в квадрат, причем выход за- датчика кода частоты вращения подключен к третьему входу цифрового регулирующего устройства и через блок возведения в квадрат - к управляющему входу преобразователя частота - код.
2. Система поп,1, отличающаяся тем, что преобразователь частота-код содержит генератор, подключенный через первый преобразователь код-частота к первым входам первого и второго элементов И, а через второй преобразователь код-ча-стота - к входу делителя частоты, выход которого соединен с динамическим входом записи триггера, вход данных которого соединен с нулевым управляющим потенциалом, вторые входы первого и второго элемен тов И соединены соответственно с прямым и инверсным выходами триггера, установочный вход которого соединен с входом записи регистра, входом сброса делителя частоты и через формирователь импуль- сов - с первым входом блока, второй вход которого является управляющим входом первого преобразователя код- частота, выходы первого и второго элементов И. подключены соответственно к входам прямого и обратного счета реверсивного счетчика, выходы которого соединены с информационными входами регистра, выходы которого соединены с управляющими входами второго преобразователя код - частота и являются выходами блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования скорости | 1984 |
|
SU1229727A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Электропривод постоянного тока | 1983 |
|
SU1119151A1 |
| Цифровая система управления | 1986 |
|
SU1361500A1 |
| Электропривод | 1985 |
|
SU1275726A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
Изобретение относится к системам управления автоматизированным электроприводом. Цель изобретения - ттовьшение динамической точности. Цифровая система регулирования частоты вращения двигателя постоянного тока содержит задатчик 1 кода частоты вращения, цифровое регулирующее устройство 2, усилитель 3 мощности, источ- .ник 4 силового напряжения, двигатель 5 постоянного тока, датчик 6 тока, связанный с устройством 2 через аналого-цифровой преобразователь 8, импульсный датчик 7 частоты вращения, связанный с устройством 2 через управляемый преобразователь 9 частота- код следящего типа, которьй по входу 11 управления связан с задатчиком 1 через устройство возведения в квадрат. Последнее позволяет обеспечить постоянство чувствительности преобразователя 9 и повысить динамическую точность системы в щироком диапазоне значений частоты вращения. 1 з.п, ф-лы, 2 ил. S. (Л
| Устройство для регулирования скорости электродвигателя постоянного тока | 1977 |
|
SU738080A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система регулирования скорости | 1984 |
|
SU1229727A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
