Вход
(Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Приемник фазоманипулированных сигналов с одной боковой полосой | 1982 |
|
SU1172061A1 |
| КОРРЕЛЯЦИОННЫЙ ПРИЕМНИК ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2014 |
|
RU2548010C1 |
| Устройство для приема сигналов с относительной фазовой модуляцией | 1986 |
|
SU1356253A1 |
| СПОСОБ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2006 |
|
RU2307474C1 |
| РАДИОЛИНИЯ С АМПЛИТУДНО-ФАЗОМАНИПУЛИРОВАННЫМИ ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1996 |
|
RU2101871C1 |
| Демодулятор частотно-манипулированных сигналов | 1982 |
|
SU1137577A1 |
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ | 2009 |
|
RU2396722C1 |
| СПОСОБ КВАДРАТУРНОГО ПРИЕМА ЧАСТОТНО-МАНИПУЛИРОВАННЫХ СИГНАЛОВ С МИНИМАЛЬНЫМ СДВИГОМ | 1999 |
|
RU2192101C2 |
| УСТРОЙСТВО УСКОРЕННОЙ СИНХРОНИЗАЦИИ ПРИЕМНИКА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2011 |
|
RU2446560C1 |
| Когерентный приемник частотномодулированных сигналов | 1986 |
|
SU1462510A1 |

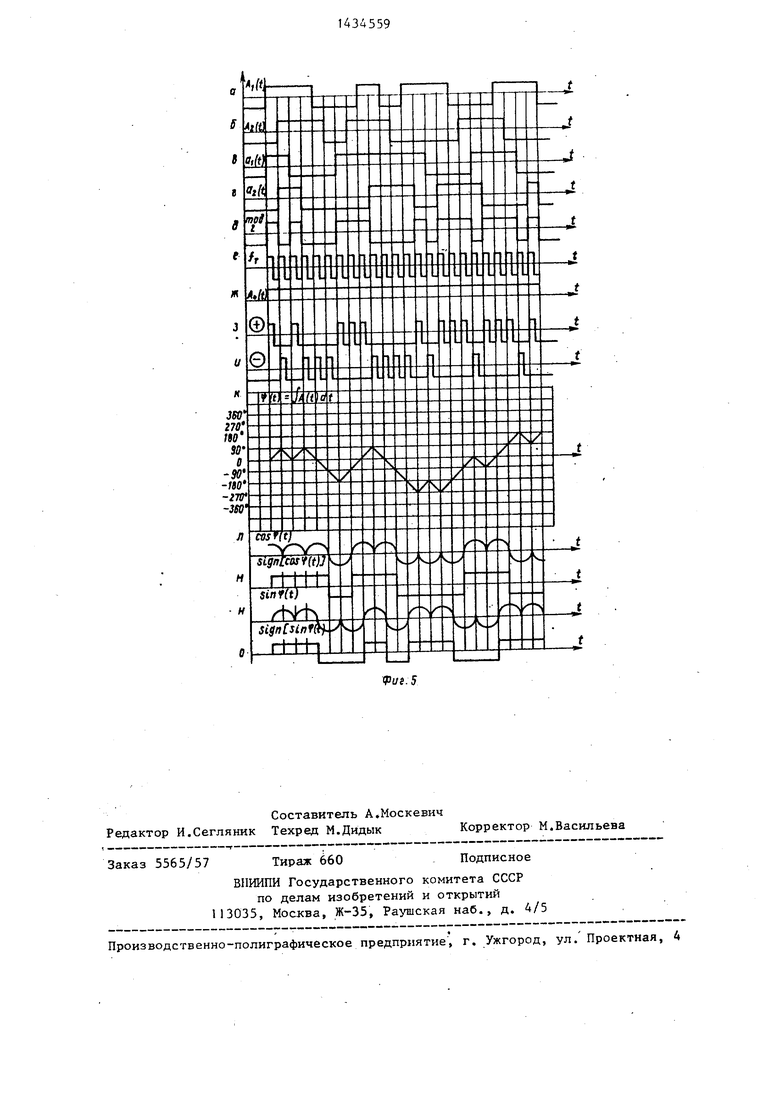
Изобретение относится к технике связи. Цель изобретения - повьппение помехоустойчивости путем устранения фазовой неопределенности. Цель достигается введением в структуру приемни.- ка трех преобразователей 1,2,3 частоты, индикатора 9 захвата, инвертора 10, двух перемножителей 11, 12 и блока 13 разделения каналов. Устранение обратной работы в предложенном решении стало возможным за счет использования при построении схемы приемника структурных свойств сигнала офсетной двукратной фазовой манипуляции, а именно свойства непрерывности фазовых траекторий, достигнутой благодаря отсутствию скачков фазы на tT, и свойств тригонометрического манипу- ляционного кода. 2. з.п. ф-лы, 5 ил., 2 табл. с S
СП
сл
ю
(pus.г
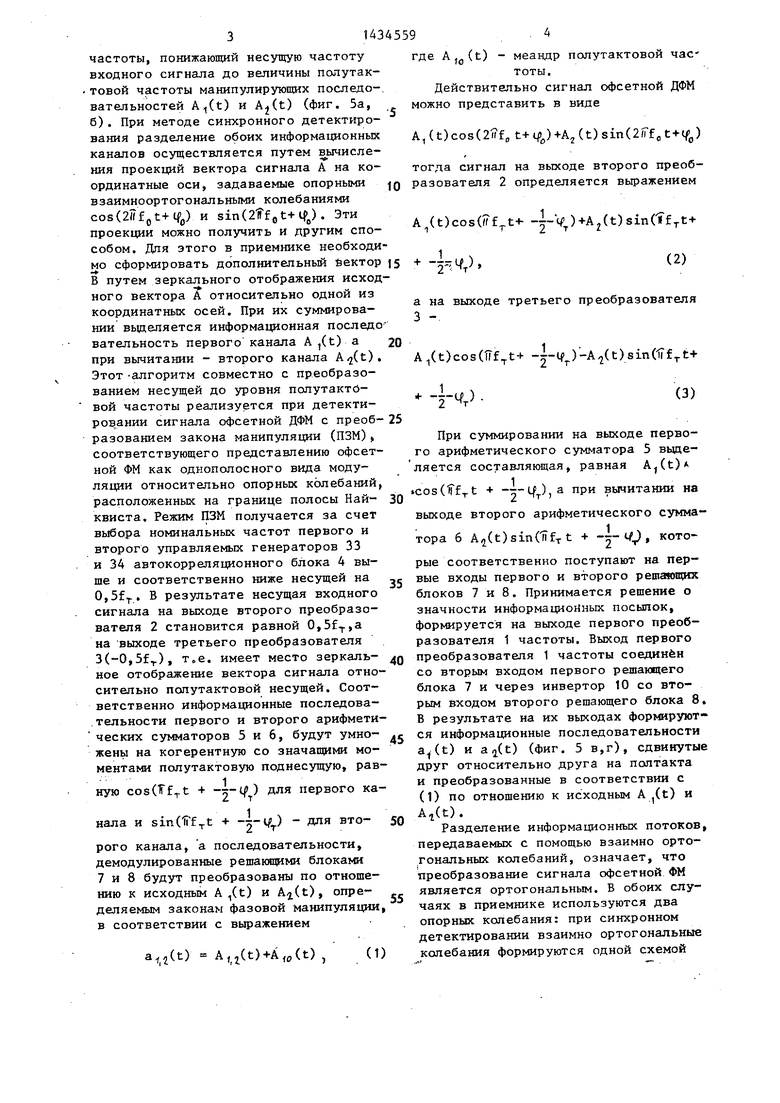
: Изобретение относится к технике Связи и может использоваться в уст- j oftcTBax обработки с поэлементным Приемом сигналов двухкратной фазовой манипуляции со сдвигом на контактах информационных последовательностей ;(офсетной ФМ), а также при цифровой реализации приема в целом в радиосвя и, радиолокации и при радиоизмере- иях.
I Цель изобретения - повьшение по- ехоустойчивости путем устранения фазовой неопределенности. На фиг. 1 представлена структур- ая электрическая схема приемника Сигналов офсетной фазовой манипуля- |ции; на фиг. 2 - вариант выполнения
к ( , (f - соответственно значения частоты и начальной фазы несущего.и тактового колебания. В автокорреля|блока разделения каналов на фиг. 3 |автокорреляционный блок восстановле- 20 ционном блоке 4 преобразователем 31
|ния опорных когерентных колебаний}частоты (фиг. 3) несущая входного
|на фиг. 4 - индикатор захвата} на
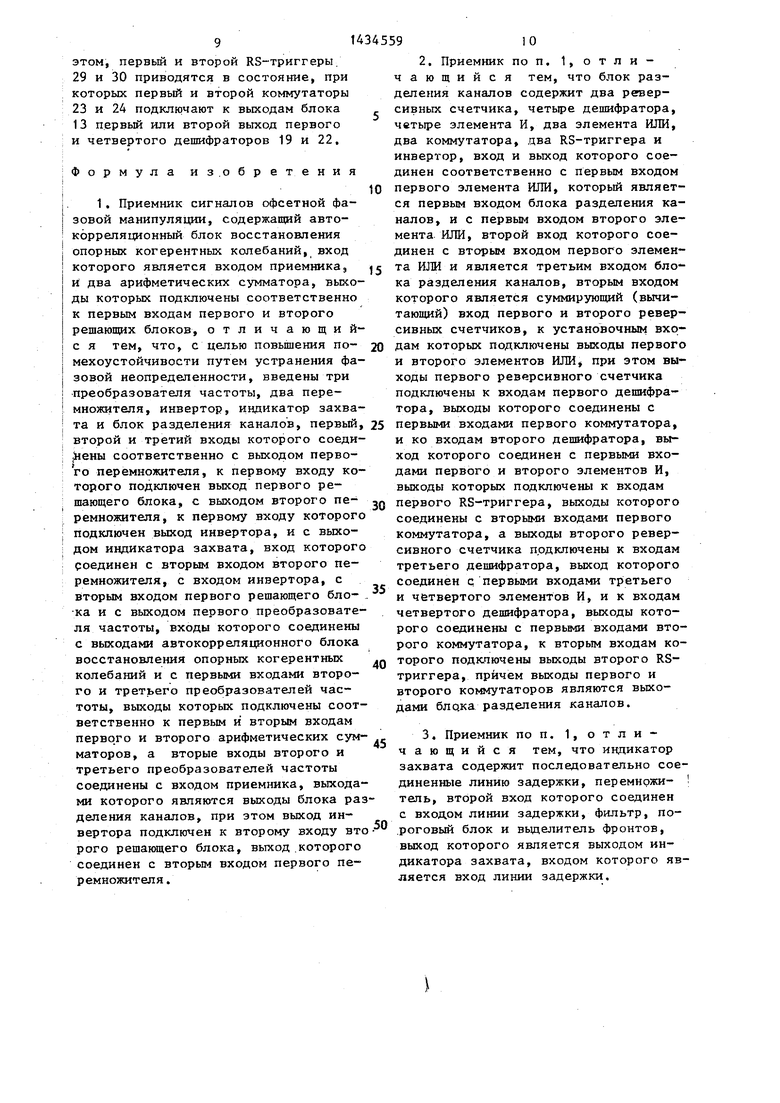
иг. 5 - эпюры напряжений, поясняющие
;работу приемника сигналов офсетной
;двукратной фазовой манипуляции.25
I Приемник сигналов офсетной фазовой
1манипуляции содержит (фиг. 1) первый,
сигнала офсетной ДФМ понижается до значения, равного полутактовой частоте. В качестве сигнала гетеродина используется сигнал первого управля мого генератора 33. В автокоррелято ре, состоящем из первого переменожи теля 35, первой линии задержки 37 и первого интегратора 39, путем биени гармоники тактовой ч астоты в спектр произведения задержанных друг относ тельно друга на полтакта копий инфо мационной последовательности и несу щей, равной тактовой, формируется дискриминационная характеристика ФА Второй канал автокорреляционного бл ка 4, включающий второй преобразова тель 32 частоты, второй - управляем генератор 34, второй перемножитель 36, вторую линию задержки 38 и втор го интеграто{)а 40, работает аналоги но первому. Поскольку автокоррелято соответствует схеме многочастотного дискриминатора, наряду с режимом ФА имеет место и режим ЧАП с полосой захвата t1/2f. Совместньй режим ча тотной и фазовой автоподстройки поз воляет оптимизировать синхронизацию по обеспечению малой величины фазов го джиттера и быстрого ввода в синхронизм первой и второго управляемы генераторов 33 и 34. Второй и трети преобразователи 2 и 3 частоты совме но с первым и вторым арифметическим сумматорами 5 и 6 образуют схему де тектора сигналов офсетной ФМ. Особе ностью этой схемы является то, что в качестве преобразующего элемента ступает когерентный преобразователь
|второй и третий преобразователь 1,2 :3 частоты, автокорреляционный блок 4 Iвосстановления опорных когерентных :колебаний, первый и второй арифмети- 1ческие сумматоры 5 и 6 первый и вто- ;рой решающие блоки 7 и 8, индикатор |9 захвата, инвертор 10, первый |и второй перемножители 11 и 12, блок l3 разделения каналов. I Блок 13 разделения каналов содер- |жит (фиг. 2) инвертор 14, первый и второй элементы ИЛИ 15 и 16, первый ;и второй реверсивные счетчики 17 и : 18, первый, второй, третий и четзвер- iтый дешифраторы 19-22, первый и вто- :рой коммутаторы 23 и 24, первый, вто ;рой, третий и четвертый элементы И 25-28, первый и второй RS-триггеры 29 и 30.
Автокорреляционный блик 4 восстановления опорных когерентных колебаний содержит (фиг. 3) первый и второй преобразователи 31 и 32 частоты первый и второй управляемые генераторы 33 и 34, первый и второй перемножители 35 и 36, первую и вторую линии задержки 37 и 38 первый и второй интеграторы 39 и 40.
Индикатор 9 захвата содержит (фиг. 4) перемножитель 41, линию задержки 42, фильтр 43, пороговый блок 44, вьщелитель 45 фронтов.
Приемник работает следующим образом.
Сигнал офсетной ФМ (фиг. 1) с вхо- да приемника (не показан) поступает на первые входы второго и третьего преобразователей 2 и 3 частоты и на вход автокорреляционного блока 4 восстановления опорных когерентных коле- баний. В автокорреляционном блоке 4 на первом выходе формируется опорное
колебание (fj)- )t-f if 1
--If , a на втором выходе -
(f,+ -l-f,)+lf,-b ,где f,, f
к ( , (f - соответственно значения частоты и начальной фазы несущего.и тактового колебания. В автокорреля5
0
0
g
5
0
5
сигнала офсетной ДФМ понижается до значения, равного полутактовой частоте. В качестве сигнала гетеродина используется сигнал первого управляемого генератора 33. В автокорреляторе, состоящем из первого переменожи- теля 35, первой линии задержки 37 и первого интегратора 39, путем биений гармоники тактовой ч астоты в спектре произведения задержанных друг относи-, тельно друга на полтакта копий информационной последовательности и несущей, равной тактовой, формируется дискриминационная характеристика ФАЛ. Второй канал автокорреляционного блока 4, включающий второй преобразователь 32 частоты, второй - управляемый генератор 34, второй перемножитель 36, вторую линию задержки 38 и второго интеграто{)а 40, работает аналогично первому. Поскольку автокоррелятор соответствует схеме многочастотного дискриминатора, наряду с режимом ФАЛ имеет место и режим ЧАП с полосой захвата t1/2f. Совместньй режим частотной и фазовой автоподстройки позволяет оптимизировать синхронизацию по обеспечению малой величины фазового джиттера и быстрого ввода в синхронизм первой и второго управляемых генераторов 33 и 34. Второй и третий преобразователи 2 и 3 частоты совместно с первым и вторым арифметическими сумматорами 5 и 6 образуют схему детектора сигналов офсетной ФМ. Особенностью этой схемы является то, что в качестве преобразующего элемента выступает когерентный преобразователь
где А
fo
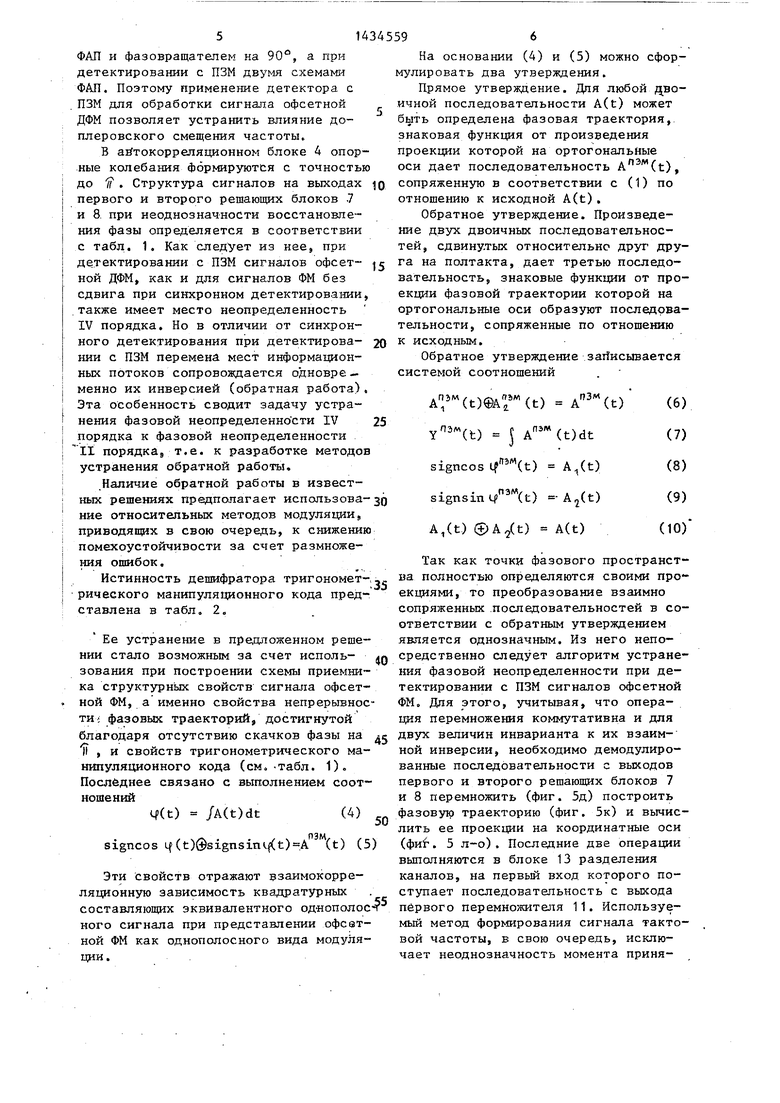
частоты, понижающий несущую частоту входного сигнала до величины полутактовой частоты манипулирующих последо-, вательностей A(t) и ) (фиг, 5а, б). При методе синхронного детектирования разделение обоих информационных каналов осуществляется путем вычисления проекций вектора сигнала А на координатные оси, задаваемые опорными |Q взаимноортогональными колебаниями cos(2((fpt+lfp) и sin(2 {gt-Hf). Эти роекции можно получить и другим способом. Для этого в приемнике необходимо сформировать дополнительный йектор j5 + -:г-ц), путем зеркального отображения исходого вектора А относительно одной из координатных осей. При их суммировании вьщеляется информационная последо вательность первого канала А ,(t) а 20 ри вьиитании - второго канала A,), Этот -алгоритм совместно с преобразованием несущей до уровня полутактовой частоты реализуется при детекти- сигнала офсетной ДФМ с преоб- 25 азованием закона манипуляции (ПЗМ)ц соответствующего представлению офсетной ФМ как одкополосного вида модуяции относительно опорных колебаний, асположенных на границе полосы Най- 30 квиста. Режим ПЗМ получается за счет выбора номинальных частот первого и второго управляемых генераторов 33 34 автокорреляционного блока 4 вые и соответственно ниже несущей на Q,5f В результате несущая входного игнала на выходе второго преобразователя 2 становится равной 0,5f,a на выходе третьего преобразователя 3(-0,5f), т„е. имеет место зеркапь- дд ное отображение вектора сигнала относительно полутактовой несущей. Соответственно информационные последовательности первого и второго арифмети-
(t)
Действи можно пред
А, (t)cos(2
тогда сигн разователя
A(t)cos(
35
а на выход
о
A/t)cos(t
При сум го арифмет ляется сос
cosCff -t + выходе вто тора 6 A2(
рые соотве вые входы блоков 7 и значности формируетс разователя преобразов со вторым блока 7 и рым входом В результа
ческих сумматоров 5 и 6, будут умно- .j ся информационные последовательности
жены на когерентную со значащими моментами полутактовую поднесущую, рав- 1
ную cosCTf -t + ) для первого
каa(t) и ) (фиг. 5 в,г), сдвинуты друг относительно друга на полтакта и преобразованные в соответствии с
(1) по отношению к исходным А (t) и A(t).
нала и sin( + -j-) - для вто- 50
рого канала, а последовательности, демодулированные рещакяцими блоками 7 и 8 будут преобразованы по отношению к исходным А (t) и A2.(t), определяемым законам фазовой манипуляции, в соответствии с выражением
a,j(t) A,д(t)-t-A,o(t) , (1)
А
fo
(t) - меандр полутактовой час
+ -:г-ц),
тоты.
Действительно сигнал офсетной ДФМ можно представить в виде
А, (t)cos( t+ % )+А (t) sin(2/rf „ )
тогда сигнал на выходе второго преобразователя 2 определяется выражением
A(t)cos( )+A2(t)sin(irfTt+
(2)
+ -:г-ц),
а на выходе третьего преобразователя
о
A/t)cos( -i-lf)-A(t)sin(
з)
При суммировании на выходе первого арифметического сумматора 5 вьще- ляется составляющая, равная )
cosCff -t + -r-tf),a при вычитании на выходе второго арифметического сумматора 6 A2(t)sin( nf-r t + -5 V которые соответственно поступают на первые входы первого и второго решающих блоков 7 и 8. Принимается рещение о значности информационных посыпок, формируется на выходе первого преобразователя 1 частоты. Выход первого преобразователя 1 частоты соединён со вторым входом первого решающего блока 7 и через инвертор 10 со вторым входом второго решающего блока 8, В результате на их выходах формируют.j ся информационные последовательности
a(t) и ) (фиг. 5 в,г), сдвинутые друг относительно друга на полтакта и преобразованные в соответствии с
50
(1) по отношению к исходным А (t) и A(t).
Разделение информационных потоков, передаваемых с помощью взаимно ортогональных колебаний, означает, что преобразование сигнала офсетной ФМ является ортогональным. В обоих случаях в приемнике используются два опорных колебания: при синхронном детектировании взаимно ортогональные колебания формируются одной схемой
ФАЛ и фазовращателем на 90°, а при детектировании с ПЗМ двумя схемами ФАЛ. Поэтому применение детектора с
ПЗМ для обработки сигнала офсетной
ДФМ позволяет устранить влияние доплеровского смещения частоты.
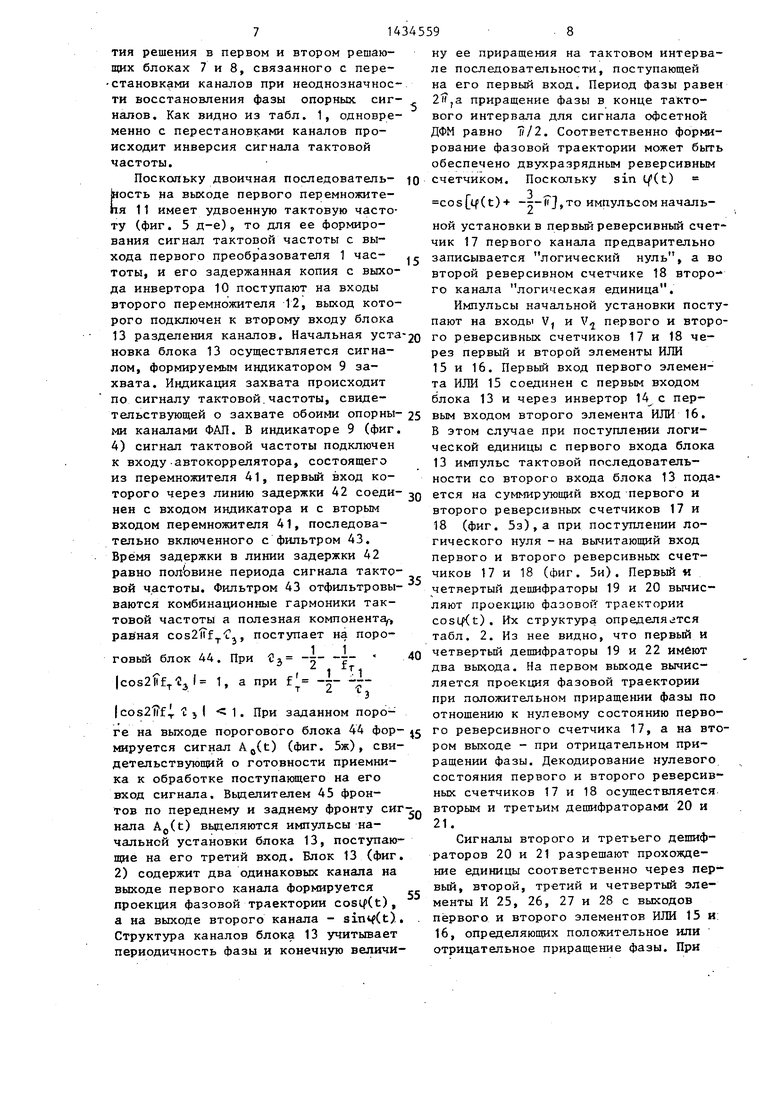
В автокорреляционном блоке 4 опорные колебания формируются с точностью до If . Структура сигналов на выходах первого и второго решающих блоков 7 и 8. при неоднозначности восстановле™ ния фазы определяется в соответствии с табл. 1. Как следует из нее, при детектировании с ПЗМ сигналов офсет- ной ДФМ, как и для сигналов ФМ без сдвига при синхронном детектировании, .также имеет место неопределенность IV порядка. Но в отличии от синхронного детектирования при детектирова- НИИ с ПЗМ перемена мест информационных потоков сопровождается одновременно их инверсией (обратная работа). Эта особенность сводит задачу устранения фазовой неопределенно сти IV порядка к фазовой неопределенности 11 порядкад т.е. к разработке методов устранения обратной работы.
Наличие обратной работы в известных решениях предполагает использова- ние относительных методов модуляции, приводящих в свою очередь, к снижению помехоустойчивости за счет размножения ошибок.
Истинность дешифратора тригонометрического манипуляционного кода представлена в табл, 2,
Ее устранение в пре,щ1оженном решении стало возможным за счет исполь- зования при построении схемы приемни- ка структурных свойств сигнала офсетной ФМ, а именно свойства непрерьгенос ти; фазовых траекторий, достигнутой благодаря отсутствию скачков фазы на If , и свойств тригонометрического манипуляционного кода (см,-табл. 1). Последнее связано с выполнением соотношений
t(t) /A(t)dt (4)
ПЗМ,
signcos q (t)@signsint|(t)A (t) (5)
Эти свойств отражают взаимокорре- лящ онную зависимость квадратурных составляющих эквивалентного од-нополос-т ного сигнала при представлении офсетной ФМ как однополосного вида модуляции.
На основании (4) и (5) можно сформулировать два утверждения.
Прямое утверждение. Для любой двоичной последовательности A(t) может быть определена фазовая траектория, знаковая функция от произведения проекции которой на ортогональные оси дает последовательность (t), сопряженную в соответствии с (1) по отношению к исходной A(t).
Обратное утверждение. Произведение двух двоичных последовательностей, сдвинутых относительно друг друга на полтакта, дает третью последовательность, знаковые функции от проекции фазовой траектории которой на ортогональные оси образуют последовательности, сопряженные по отношению к исходным.
Обратное утверждение записывается системой соотношений
.пгм,
ПЗМ
(t)®Ar(t) (t) ) J (t)dt signcos (t) A(t) signsin ) -Aj(t) A,(t) ® A,/t) A(t)
о
-
л
0
Так как точки фазового пространства полностью определяются своими проекциями, то преобразование взаимно сопряженных .последовательностей в соответствии с обратным утверждением является однозначным. Из него непосредственно следует алгоритм устранения фазовой неопределенности при детектировании с ПЗМ сигналов офсетной ФМ. Для этого, учитывая, что операция перемножения коммутативна и для двух величин инварианта к их взаимной инверсии, необходимо демодулиро- ванные последовательности с выходов первого и второго решаюшзнх блоков 7 и 8 перемножить (фиг. 5д) построить фазовую траекторию (фиг. 5к) и вычислить ее проекции на координатные оси (фи. 5 л-о). Последние две операции выполняются в блоке 13 разделения каналов, на первый вход которого поступает последовательность с выхода первого перемножителя 11. Используемый метод формирования сигнала тактовой частоты, в свою очередь, исключает неоднозначность момента принятия решения в первом и втором решающих блоках 7 и 8, связанного с пере- становкэми каналов при неоднозначности восстановления фазы опорных CHI- налов. Как видно из табл. 1, одновременно с перестановками каналов происходит инверсия сигнала тактовой частоты.
ну ее приращения на тактовом интервале последовательности, поступающей на его первый вход. Период фазы равен . ZiijE приращение фазы в конце тактового интервала для сигнала офсетной ДФМ равно (/2. Соответственно формирование фазовой траектории может быть обеспечено двухразрядным реверсивным
Поскольку двоичная последователь- IQ счетчиком. Поскольку sin Lf (t)
ность на выходе первого перемножите- пя 11 имеет удвоенную тактовую частоту (фиг. 5 д-е), то для ее формирования сигнал тактовой частоты с (t)-«- -T-li JjTo импульс ом начальго канала логическая единица.
Импульсы начальной установки поступают на входы V и V первого и второной установки в первьй реверсивный счет чик 17 первого канала предварительно хода первого преобразоватепя 1 час- записывается логический нуль а во тоты, и его задержанная копия с выхо- второй реверсивном счетчике 18 второ- да инвертора 10 поступают на входы второго перемножителя 12, выход которого подключен к второму входу блока
13 разделения каналов. Начальная уста-2о го реверсивных счетчиков 17 и 18 че- новка блока 13 осуществляется сигна- рез первый и второй элементы ИЛИ лом, формируемым индикатором 9 за- 15 и 16. Первый вход первого элемен- хвата. Индикация захвата происходит та ИЛИ 15 соединен с первым входом по сигналу тактовой.частоты, свиде- блока 13 и через инвертор 14 с пер- тельствующей о захвате обоими опорны- 25 вым входом второго злемента ИЛИ 16. ми каналами ФАП. В индикаторе 9 (фиг. в этом случае при поступлении логи- 4) сигнал тактовой частоты подключен ческой единицы с первого входа блока к входу.автокоррелятора, состоящего 13 импульс тактовой последователь- из перемножителя 41, первый вход ко- ности со второго входа блока 13 пода- торого через линию задержки 42 соеди- Q ется на суммирующий вход первого и нен с входом индикатора и с вторым второго реверсивных счетчиков 17 и входом перемнояштеля 41, последова- 8 (фиг. 5з),а при поступлении ло- тельно включенного с фильтром 43. Время задержки в линии задержки 42 равно полЬвине периода сигнала тактовой частоты. Фильтром 43 отфильтровы- ваются комбинационные гармоники тактовой частоты а полезная компоненту рав ная cos2 irf Cj, поступает на поро1
1
говый блок 44. При з 7 f
1 i |cos2 irf 2.j 1 1, а при f
С lOir
3
cos2 iif f t j I 1 . При заданном порогического нуля -на вычитающий вход первого и второго реверсивных счетчиков 17 и 18 (фиг. 5и). Первый « четвертый дешифраторы 19 и 20 вычисляют проекцию фазовой траектории cosLf(t) . Их структура определяк тся табл. 2. Из нее видно, что первый и Q четвертьш дешифраторы 19 и 22 имеют два выхода. На первом выходе вычисляется проекция фазовой траектории при положительном приращении фазы по отношению к нулевому состоянию первоге на выходе порогового блока 44 фор- ° реверсивного счетчика 17, а на вто- мируется сигнал ) (фиг. 5ж), сви- ром выходе - при отрицательном при- детельствующий о готовности приемника к обработке поступающего на его вход сигнала. Вьщелителем 45 фронращении фазы. Декодирование нулевого состояния первого и второго реверсивных счетчиков 17 и 18 осуществляется
тов по переднему и заднему фронту сиг- вторым и третьим дешифраторами 20 и
нала AQ(t) вьщеляются импульсы на- 21.
чальной установки блока 13, поступаю- Сигналы второго и третьего дешифщие на его третий вход. Блок 13 (фиг. раторов 20 и 21 разрешают прохожде2) содержит два одинаковых канала на
выходе первого канала формируется
проекция фазовой траектории cosif(t),
а на выходе второго канала - sini(t).,
Структура каналов блока 13 учитывает
периодичность фазы и конечную величи55
ние единицы соответственно через пер- вый, второй, третий и четвертый элементы И 25, 26, 27 и 28 с выходов первого и второго элементов ИЛИ 15 и: 16, определяющих положительное или отрицательное приращение фазы. При
ну ее приращения на тактовом интервале последовательности, поступающей на его первый вход. Период фазы равен ZiijE приращение фазы в конце тактового интервала для сигнала офсетной ДФМ равно (/2. Соответственно формирование фазовой траектории может быть обеспечено двухразрядным реверсивным
счетчиком. Поскольку sin Lf (t)
(t)-«- -T-li JjTo импульс ом начальго канала логическая единица.
Импульсы начальной установки поступают на входы V и V первого и второной установки в первьй реверсивный счет чик 17 первого канала предварительно записывается логический нуль а во второй реверсивном счетчике 18 второ-
го реверсивных счетчиков 17 и 18 че- рез первый и второй элементы ИЛИ 15 и 16. Первый вход первого элемен- та ИЛИ 15 соединен с первым входом блока 13 и через инвертор 14 с пер- вым входом второго злемента ИЛИ 16. в этом случае при поступлении логи- ческой единицы с первого входа блока 13 импульс тактовой последователь- ности со второго входа блока 13 пода- ется на суммирующий вход первого и второго реверсивных счетчиков 17 и 8 (фиг. 5з),а при поступлении ло-
-2о го реверсивных счетчиков 17 и 18 че- рез первый и второй элементы ИЛИ 15 и 16. Первый вход первого элемен- та ИЛИ 15 соединен с первым входом блока 13 и через инвертор 14 с пер- 25 вым входом второго злемента ИЛИ 16. в этом случае при поступлении логи- ческой единицы с первого входа блока 13 импульс тактовой последователь- ности со второго входа блока 13 пода- Q ется на суммирующий вход первого и второго реверсивных счетчиков 17 и 8 (фиг. 5з),а при поступлении ло-
гического нуля -на вычитающий вход первого и второго реверсивных счетчиков 17 и 18 (фиг. 5и). Первый « четвертый дешифраторы 19 и 20 вычисляют проекцию фазовой траектории cosLf(t) . Их структура определяк тся табл. 2. Из нее видно, что первый и Q четвертьш дешифраторы 19 и 22 имеют два выхода. На первом выходе вычисляется проекция фазовой траектории при положительном приращении фазы по отношению к нулевому состоянию перво
ние единицы соответственно через пер- вый, второй, третий и четвертый элементы И 25, 26, 27 и 28 с выходов первого и второго элементов ИЛИ 15 и: 16, определяющих положительное или отрицательное приращение фазы. При
этом, первый и второй RS-триггеры. 29 и 30 приводятся в состояние, при которых первый и второй коммутаторы 23 и 24 подключают к выходам блока 13 первый или второй выход первого и четвертого дешифраторов 19 и 22,
Формула из.обре тения
го перемножителя, к первому
та и блок разделения каналов, первый, 25 первыми входами первого коммутатора, второй и третий входы которого соеди-
выходом первовходу которого подключен выход первого решающего блока, с выходом второго пе- Q ремножителя, к первому входу которого подключен выход инвертора, и с выходом индикатора захвата, вход которого соединен с вторым входом второго перемножителя, с входом инвертора, с вторым входом первого решающего бло- . ка и с выходом первого преобразователя частоты, входы которого соединены с выходами автокорреляционного блока восстановления опорных когерентных колебаний и с первыми входами второго и третьего преобразователей частоты, выходы которых подключены соответственно к первым и вторым входам первого и второго арифметических сум- маторов, а вторые входы второго и третьего преобразователей частоты соединены с входом приемника, выходами которого являются выходы блока раз деления каналов, при этом выход инвертора подключен к второму входу вто рого решающего блока, выход .которого соединен с вторым входом первого перемножит еля.
35
40
50
и ко входам второго дешифратора, выход которого соединен с первыми входами первого и второго элементов И, выходы которых подключены к входам первого RS-триггера, выходы которого соединены с вторыми входами первого коммутатора, а выходы второго реверсивного счетчика подключены к входам третьего дешифратора, выход которого соединен с первыми входами третьего и четвертого элементов И, и к входам четвертого дешифратора, выходы которого соединены с первьвчи входами второго коммутатора, к вторым входам которого подключены выходы второго RS- триггера, причем выходы первого и второго коммутаторов являются выходами блока разделения каналов.
3, Приемник по п. 1, отличающийся тем, что индикатор захвата содержит последовательно соединенные линию задержки, перемиржи- таль, второй вход которого соединен с входом линии задержки, фильтр, по- .роговый блок и выделитель фронтов, выход которого является выходом индикатора захвата, входом которого является вход линии задержки.
2, Приемник по п. 1, отличающийся тем, что блок разделения каналов содержит два реверсивных счетчика, четыре дешифратора, чвтьфе элемента И, два элемента ИЛИ, два коммутатора, два RS-триггера и инвертор, вход и вьжод которого соединен соответственно с первым входом
первого элемента ИЛИ, который является первым входом блока разделения каналов, и с первым входом второго элемента ИЛИ, второй вход которого соединен с вторым входом первого элемента ШШ и является третьим входом бло ка разделения каналов, вторым входом которого является суммирующий (вычитающий) вход первого и второго реверсивных счетчиков, к установочным вхрдам которых подключены выходы первого и второго элементов ИЛИ при этом выходы первого реверсивного счетчика подключены к входам первого дешифратора, выходы которого соединены с
5 первыми входами первого коммутатора,
Q
5
0
0
и ко входам второго дешифратора, выход которого соединен с первыми входами первого и второго элементов И, выходы которых подключены к входам первого RS-триггера, выходы которого соединены с вторыми входами первого коммутатора, а выходы второго реверсивного счетчика подключены к входам третьего дешифратора, выход которого соединен с первыми входами третьего и четвертого элементов И, и к входам четвертого дешифратора, выходы которого соединены с первьвчи входами второго коммутатора, к вторым входам которого подключены выходы второго RS- триггера, причем выходы первого и второго коммутаторов являются выходами блока разделения каналов.
3, Приемник по п. 1, отличающийся тем, что индикатор захвата содержит последовательно соединенные линию задержки, перемиржи- таль, второй вход которого соединен с входом линии задержки, фильтр, по- .роговый блок и выделитель фронтов, выход которого является выходом индикатора захвата, входом которого является вход линии задержки.
Фаза опорньпс колебанийО ,О
Первый фазовый детектора
Второй фазовый детектора
Сигнал тактовой частоты у г
о;1г -IT , о н ;1Г
И ,
-а.
3 1
-а.
4-г.
4-f.
-.
Таблица 2
)
ф(/г. 2
фие. 3
фиг.
ЗВО
т т
50
о
90 -160
-2n
-Ш
Составитель А.Москевич Редактор И.Сегляник Техред М.ДидыкКорректор М.Васильева
Заказ 5565/57
Тираж 660
ВПИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Устройство для приема сигналов с двухкратной фазовой манипуляцией | 1981 |
|
SU1046963A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
