Изобретение относится к горной промьппленности, :в частности к устройствам для механизации спускоподъем- Hijix операций при бурении скважин, и может быть использовано при пербмеще- кии труб из горизонтального положе- Ш 1я в вертикальное на ось скважины.
Целью изобретения является повышение надежности при работе с трубами различных диаметров.
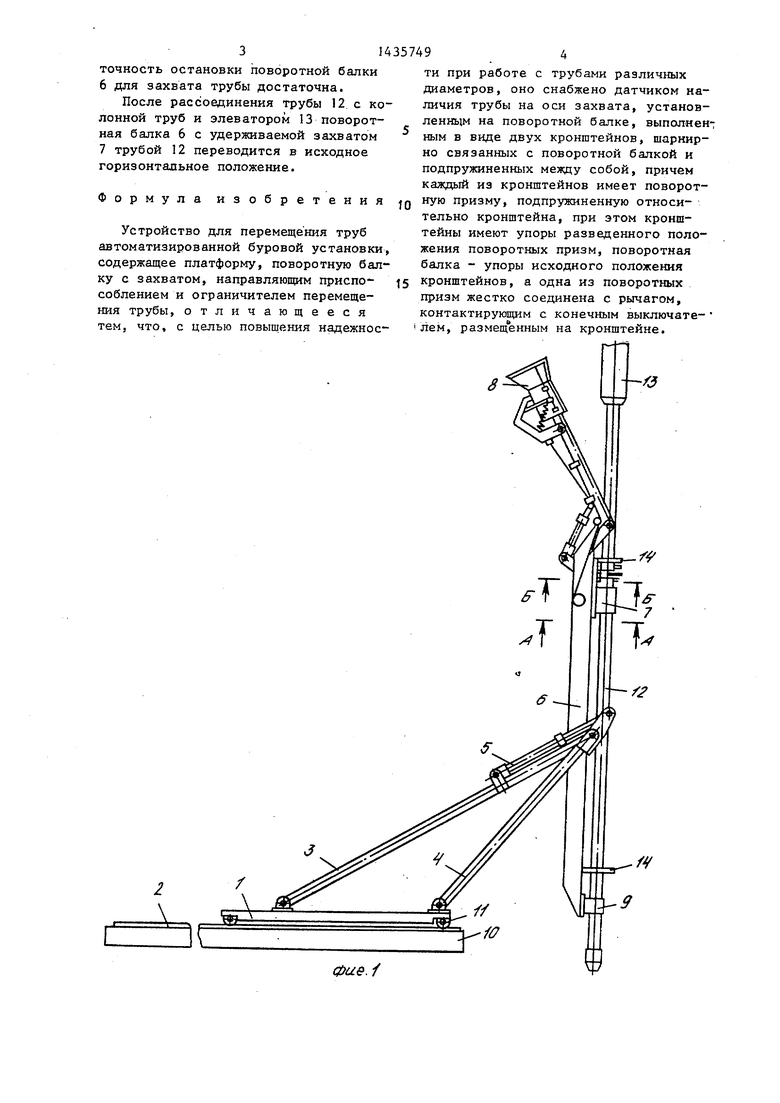
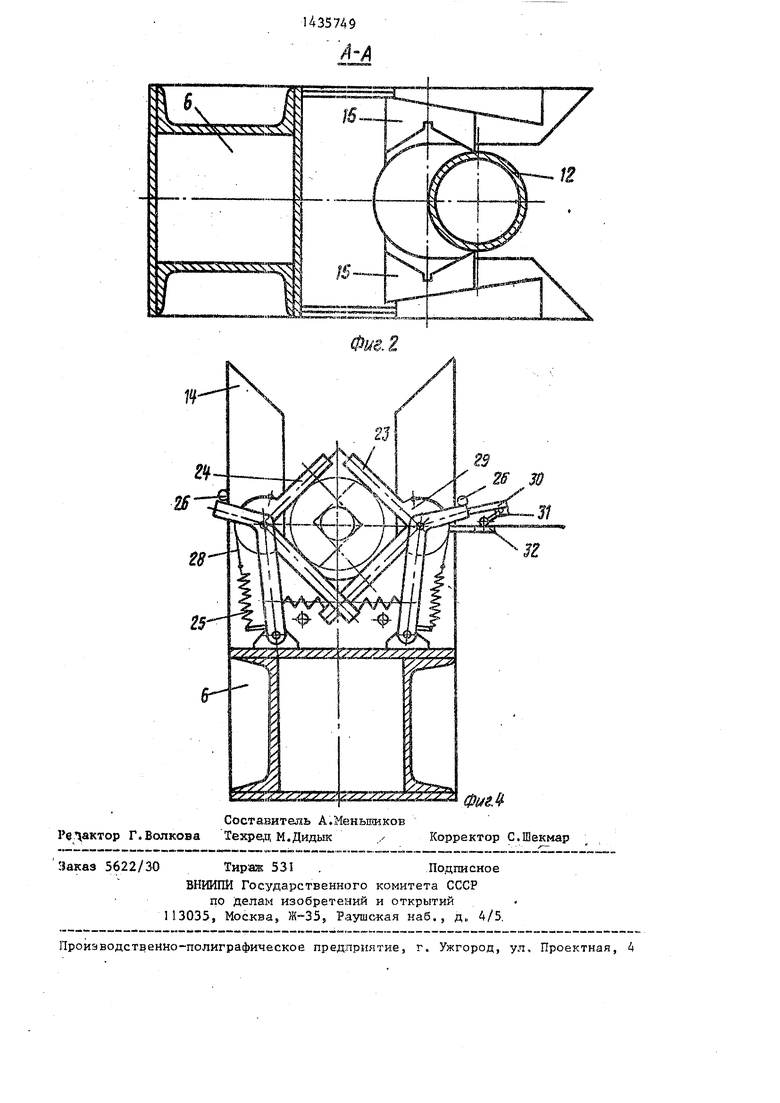
На фиг.1 изображено устройство с поворотной балкой в вертикальном положении на оси скважины в момент передачи трубы от элеватора устройству; на фиг.2 - разрез А-А на фиг.1; на фиг. 3 - разрЕ з Б-Б на фиг« 1; на - датчик наличия трубы на оси захвата в рабочем положе1-ши при работе с трубой максимального диаметра„
Устройство смонтировано на платформе 1, установленной на рельсах 2., и содержит опорные стойки 3 и 4 гид- роцилиндр 5 поворота балкиэ поворотную балку 6 с захватом 7, направляющим приспособлением 8 и ниж1-шм центратором 9. Рельсы 2 установлены на эстакаде 10, которая имеет упор 11 переднего, положения платфорьш (поворотная балка на оси скважины). Бурильная труба 12 удерживается на оси скважины элеватором 3. На поворотной балке 6 установлень замены 14 для труб, располагаемые в районах захвата 7 и нижнего центратора 9. Захват 7 имеет призматические зажимные губки 15. Между захватом 7 и заманом 14 на поворотной балке 6 на шарнирах 16 и 17 установлены крснштейны 18 и 19. Кронштейны 18 и 59 соединены меязду собой пружиной 20 и прижаты к упорам 21. На кронгатейных 18 и 19 смонтированы на шарнирах 22 поворотные приз- 23 и 24. Поворотные призмы 24 и 23 подпружинены относительно кронштейнов 18 и 19 пружинами 25 и имеют упоры 26 разведенного положения, установленные на крогаптейнах 18 и 19. Пружины 25 закреплены на кронштейнах 18 и 19 через жестко связанные с ни- я кронштейны 27, а к поворотным п эйзмам 23 и 24 прикреплены через гибкую связь 28 (например, тросик), к кулачкам 29, жестко связанными с поворотными призмами 23 и 24. Кронштейн 18 содержит выступ 30, на котором закреплен конечный выключатель 31. На поворотной призме 23 жестко
0
5
закреплен рычаг 32, контактирующий с конечным выключателем 31.
Устройство работает следующим образом.
В исходном положении поворотная балка 6 находится в горизонтальном положении, захват 7 открыт, зажимные призматические губки 15 разведены. В процессе подъема трубы 12 элеватором 13 из скважины платформа 1, двигаясь по рельсам 2, перемещает поворотную балку 6 к трубе 12 (на сква- жину). При этом гидроцилиндром 5 поворота поворотную балку 6 приводят в вертикальное положение. После того, как элеватор 13 полностью поднимет трубу 12 из сквазкииы поворотная балка б приходит на ось скважины. Остановка балки происходит при упоре платформы 1 в упор 1 1. Поворотнуго балку 6 в вертикальном положении регулируют при монтаже таким образом, чтобы она имела в верхней своей части небольшой наклон вперед по ходу перемещения ее к скважине, но не более максимально возможного допуска на отклонение осей элеватора 13 и направляющего приспособления 8 что необходимо для операции передачи трубы от поворотной балки 6 к элеватору 13 при спуске колонны. При такой установке поворотной балки 6 во время перемещения ее к трубе 12 независимо от диаметра обрабатываемой трубы по- ворот1ше призмы 23 и 24 встречаются с трубой 12, прижимаются к ней при помощи пружины 20. Дальнейшее переме- ще1-1ие поворотной балк1 6 к трубе 42 заставляет обе поворотные призмы 23 и 24 поворачиваться на шарнирах 22 и отслеживать за трубой 12. При совмещении оси захвата 7 и удерживаемой элеватором 13 трубы 12 рычаг 32 включает конечный выключатель 31, что является командой для зажима трубы захватом 7. Это происходит потому s, что шарниры 22 поворотных призм 23 и 24 расположены точно по горизонтальной оси захвата 7 для самой большой по диаметру и самой малой из об-, рабатываемых труб. В связи с незначительными перемещениями кронштейнов 19 и 18 при обработке остального диапазона диаметров труб (вершины поворотных призм .или шарниры 22 перемещаются по дуге с радиусом, равным расстоянию между шарнирами 22.и 17)
0
5
0
5
0
5
/
0ue. f
--
0i4tff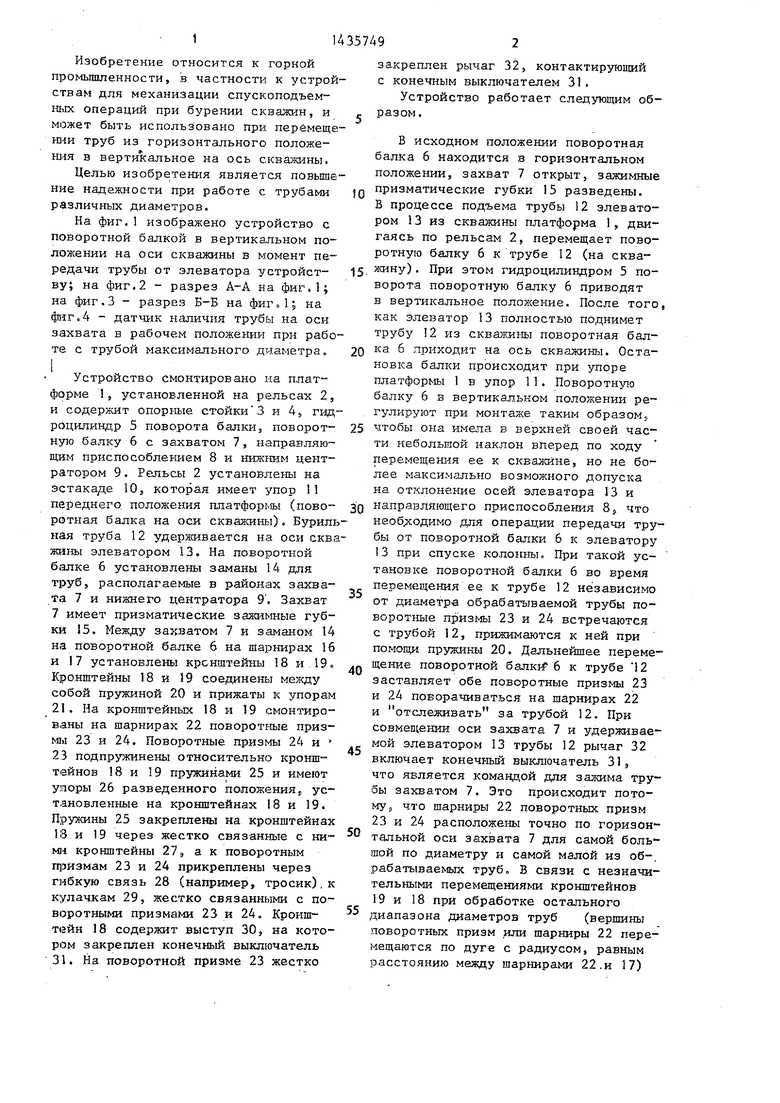
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения труб | 1977 |
|
SU735740A1 |
| Устройство для перемещения труб автоматизированной буровой установки | 1982 |
|
SU1097773A1 |
| Автоматический агрегат для ремонта скважин,мостки,автоматический ключ | 1980 |
|
SU1141180A1 |
| Стегальная швейная машина | 1989 |
|
SU1772254A1 |
| Поточная линия формирования колесных пар подвижного состава | 1972 |
|
SU490701A1 |
| Буровая установка для бурения с плавучего средства | 1980 |
|
SU939715A1 |
| УСТАНОВКА ХОЛОДНОЙ НАПРЕССОВКИ (ВАРИАНТЫ) | 2013 |
|
RU2526349C1 |
| Устройство для транспортировки рулонов ткани от промерочно-разбраковочного станка к элеватору-накопителю | 1990 |
|
SU1719293A1 |
| Устройство для расшивки рельсошпальногозВЕНА жЕлЕзНОдОРОжНОгО пуТи | 1977 |
|
SU840222A1 |
| Автоматический элеватор для бурильных труб | 1987 |
|
SU1514901A1 |
Изобретение относится к горной пpo i-cти и м.б. использовано при перемещении труб (Т) из горизонтального положения в вертикальное на ось скважины. Цель изобретения - повьше- ние надежности при работе с Т различных диаметров. Устр-во содержит плат- с - Sформу, поворотную балку 6 с захватом ; и заманами 14 для Т, направлякщим приспособлением и ограничителем перемещения Т. Между захватом и заманом 14 на балке 6 на шарнирах 16 и 17 установлен датчик наличия Т на оси захвата, вьтолненный в виде кронштейнов (К) 18 и- 19, соединенных между собой пружиной 20 и прижатых к упорам 21 исходного положения К 18 и 19. Каждьй из последних имеет смонтированные на шарнирах 22 поворотные призмы (П) 23 и 24, подпружиненные относительно К 18 и 19 пружинами 25, и упоры 26 разведенного положения П 23 и 24. На П 23 жестко закреплен рычаг 32, контактирующий с конечным выключателем 31. Балка 6 перемещается к Т 12, при этом П 23 и 24 прижи - маются к ней пружиной 20 и поворачиваются на шарнирах 22. При совмещении оси захвата и Т 12 рычаг 32 вклю чает выключатель 31. При этом захват зажимает Т 12. 4 ил. . 6nottpHymo i (Л i4i Од СП 41 4ik СО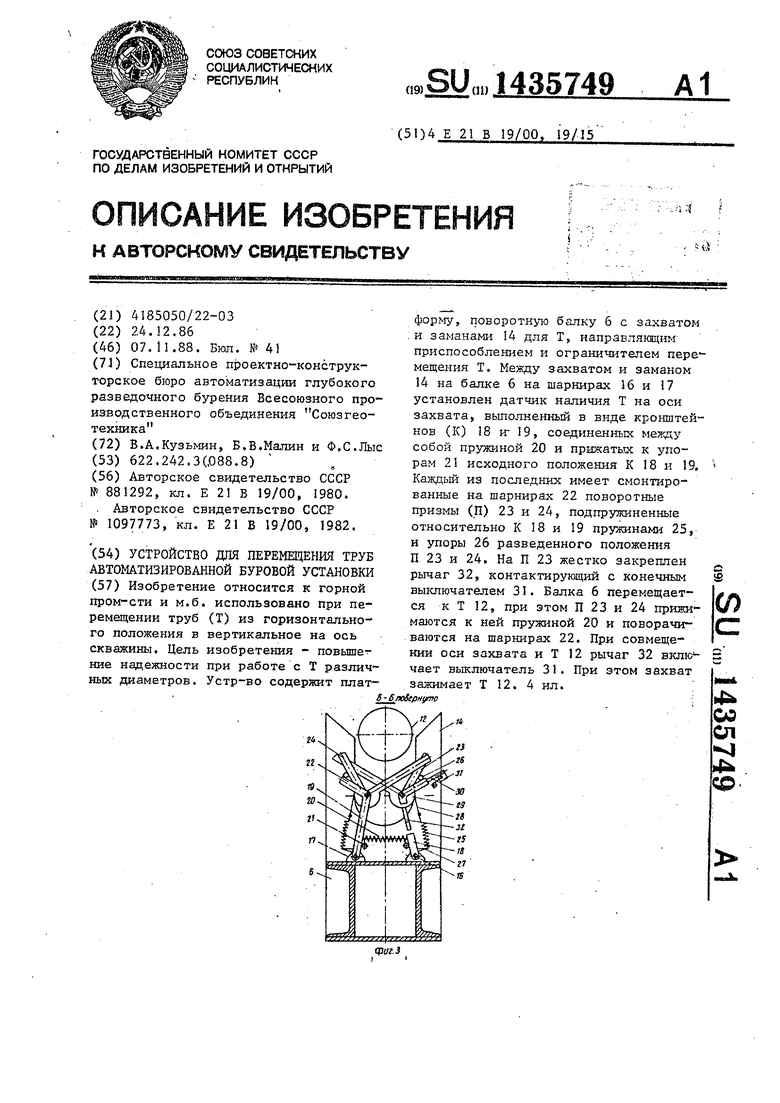
| Устройство для перемещения труб | 1980 |
|
SU881292A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для перемещения труб автоматизированной буровой установки | 1982 |
|
SU1097773A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
