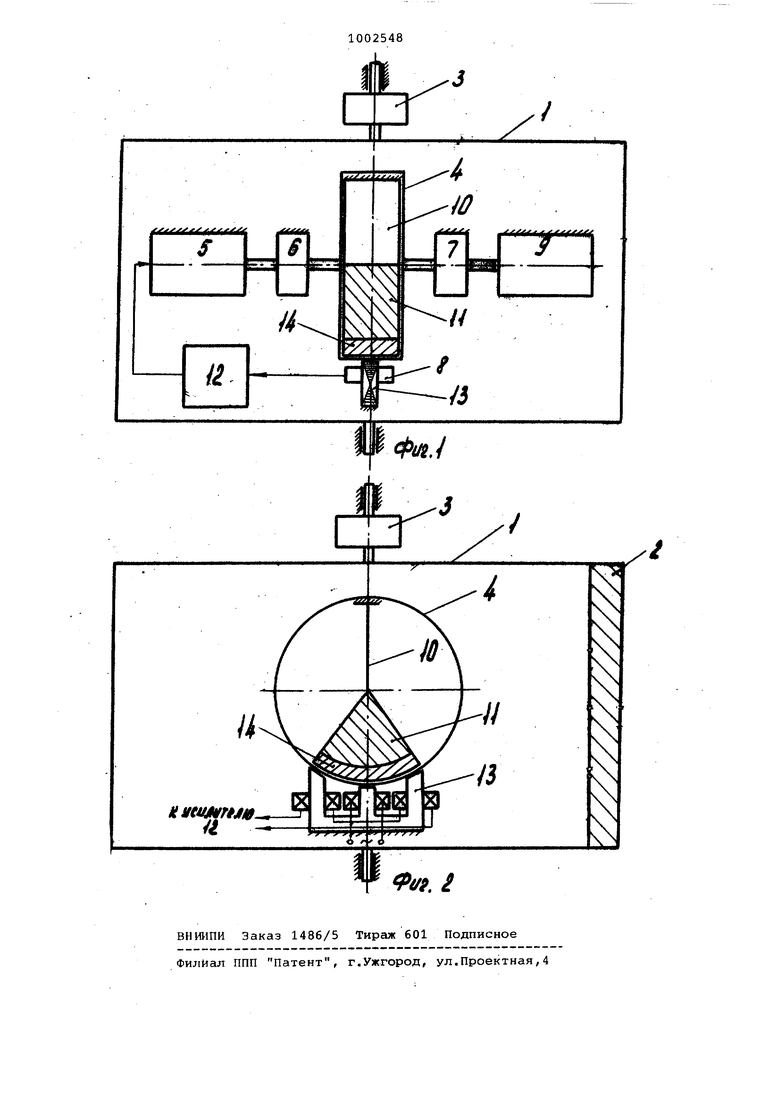
ятника, а следовательно, к ошибке в определении зенитного угла. Преобразователь характеризуется также нелинейностью выходной характеристи ки из.-за наличия жесткости пружины и изменения силы деформации пружины от силы тяжести груза по синусоидал ному закону. Поскольку выходная характеристика преобразователя изме няется по синусоидальному закону, то с увеличением угла наклона прибо ра чувствительность резко падает, вследствие этого измерять углы боле 60 и тем более близкие к 90 стано вится практически нецелесообразным, тем самым ограничивается диапазон изм ряемых углов. К недостаткам преобразо вателя следует отнести также низкую н дежность, так как пружина маятника со вершает колебания со значительной амплитудой, а это может привести к необратимым процессам в пружине, т к ее деформации, вплоть до ее полом ки. Целью изобретения является повышение точности преобразования. Указанная цель достигается тем, что преобразователь зенитного угла содержащий внешнюю рамку, включающу установленный на ее оси токосъем, двигатель и понижающий редуктор, внутреннюю рамку, на которой закреп лен маятник, выполненный в виде пластииы с грузом, датчик угла со статором, снабжен соединенным с внутренней рамкой повышающим редукт ром и связанным с ним дополнительны датчиком угла, усилителем, а внешня рамка снаб; сена эксцентричным грузом и на ее оси вращения установлена внутренняя рамка, причем оси вращения обеих рамок взаимно перпендикулярны, при этом плоскость качения маятника расположена в плоскости эксцентричного груза, а усилитель связан с датчиком угла и с двигателем. На фиг. 1 изображен преобразователь зенитного угла; на фиг. 2 то же, разрез. Преобразователь содержит рамку 1 с эксцентричным грузом 2, на оси которой установлен токосъем 3, внут реннюю рамку 4, двигатель 5, понижающий редуктор б, повышающий редук тор 7, датчики угла 8 и 9, маятник 10 с грузом 11 и усилитель 12. Датчик угла 8 имеет статор 13, укрепленный на рамке 1, и ротор 14, укрепленный на грузе 11, Двигатель 5 через редуктор 6 передает вращение на рамку 4, а вращение рамки 4 чере повышающийредуктор 7 на датчик угла 9. Выход усилителя 12 подключен к выходу датчика угла 8, а выход к двигателю 5. С помощью токосъема 3 осуществляется подвод питания к схеме и съем полезного сигнала с преобразователя. Преобразователь работает следующим образом. Когда ось маятника 10 вертикальна и совпадает с осью рамки 1, ротор 14 датчика угла 8 находится в среднем положении и на ее выходе сигнал отсутствует. При наклоне преобразователя на некоторый угол маятник 10 с грузом 11 отклоняется от оси внешней рамки 1, а вместе с грузом 11 отклоняется и ротор 13 датчика угла 8 и на ее выходе появляется сигнал рассогласования, пропорциональный углу отклонения маятника 10, в виде напряжения ( ЭДС ) переменного тока, который, усиленный усилителем 12, подается на двигатель 5, отрабатывающий рамку 4 посредством понижающего редуктора 6, а вместе с ней и маятник 10 ДО совмещения ее оси с осью рамки 1. При этом груз 11 с ротором 14 занимает среднее положение и выход датчика угла 8 обнуляется, происходит поворот рамки 4 на угол отклонения маятника 10. При дальнейшем увеличении угла наклона прибора появившийся сигнал рассогласования на выходе датчика угла 8 следящей системой обнуляется и осуществляется дальнейший поворот рамки 4, т.е. осуществляется суммирование углов отклонения маятника 10 в угол поворота рамки 4. При изменении наклона преобразователя в сторону уменьшения угла маятник 10 отклоняется в противоположную сторону и на выходе датчика угла 8 появляется сигнал рассогласования в противофазе, и двигатель 5 отрабатывает рамку 4 в противоположном направлении до исчезновения сигнала рассогласования, т.е. происходит вычитывание угла отклонения маятника 10 от угла поворота рамки 4. Таким образом, происходит непрерывное отслеживание рамки 4 за отклонениями маятника 10, причем угол поворота рамки 4 равен углу наклона преобразователя, т.е. зенитному углу, который посредством редуктора 7 передается на ротор (, не показан ) датчика 9, и на ее выходе действует сигнал, пропорциональный зенитному углу. Эксцентричный груз 2 позволяет выставлять маятник 10 в плоскость наклона преобразователя . В предлагаемом преобразователе зенитного угла повышается точность преобразования по следующим причинам. Во-первых, исключается влияние неравномерности вращения внутренней рамки и изменения температуры на входной сигнал. Так как амплитуда отклонения аятника перестает быть информативной величиной, а служит лишь для работы следящей системы, непрерывно отрабатывающей маятник до совпадения с осью наружной рамки. Во-вторых, уменьшаются до минимума высокочастотные колебания маятника, действую щие на выходе преобразователя от ударов его при движении в скважине, так как следящая система отфильтровывает эти колебания. Кроме того, можно значительно увеличить коэффициент демпфирования маятника за счет увеличения вязкости демпфирующей жидкости и уменьшения до минимума зазора между маятником и внутренней рамкой, что в свою очередь повышает эффективность демпфировани В-третьих, некоторые типы инклинометров, например гироскопические инклинометры, работают при зенитных углах не более 60 (гироскоп эффективно работает только при зенитных углах не более бO°, а диапазон изме рения датчиков угла, используемых для измерения зенитных углов, значительно превышает-это значение, например бесконтактный синусно-косинусный трансформатор (ВСКТ), диап зон измеряемых углов которой состав ляет 0-360°. Относительная погреш ность БСКТ, включенного в режим фазовращателя, при этом составляет например, 0,35%, т.е. абсолютная погрешность составляет 1,26° и если при измерении зенитного угла 0-60° повернуть при помощи следящей систе мы ротор БСКТ так же на угол 60, то абсолютная погрешность измерения зенитного угла составит 1,26°. Теперь, если при измерении, зенитного угла 60° следящая система при помощи повышающего редуктора с передаточньом .отношением 1:6 поворачивает ротор БСКТ на угол 360°, то относи тельная погрешность измерения зени ного угла в диапазоне 0-60° состав ляет также 0,35%, так как индикато на который работает БСКТ,показывае значение углов в диапазоне О-бб, то абсолютная погрешность измерени зенитного угла уже составляет 0,21 что в 6 раз меньше, чем абсолютная погрешность измерения зенитного угла без применения повышающего ре дуктора. Следовательно, точность измерения повышается. Кроме того, повышается линейность выходной хар теристики, так как не вносится в выходную характеристику преобразователя нелинейность, вызванная нелинейным характером изменения деформации пружины от угла отклонения маятника, поскольку маятник работает при малых углах отклонения и постоянно отслеживается следящей системой в состояние с углом отклонения от оси внешней рамки равным нулю. По этой причине повышается надежность маятника. Предлагаемой преобразователь зенитного угла применяется в гидроскопическом инклинометре, эконом1 ческий эффект от внедрения которого составляет 50 тыс.руб. в год на одно изделие. Экономическая эффективность от внедрения преобразователя зенитного угла составляет примерно 25% от экономической эффективности всего гироскопического инклинометра, что составляет 12,5 тыс. руб. экономии в год на один преобразователь. Формула изобретения Преобразователь зенитного угла,содержащий внешнюю рамку,включающую ус-. тановленный на ее оси токосъем, двигатель и понижающий редуктор, внутреннюю рамку, на которой закреплен маятник, выполненный в виде пластины с грузом, датчик узла со статором, отличающийся тем, что, с целью повышения точности преобразования, он снабжен соединенным с внутренней рамкой повышающим редуктором и связанным с ним дополнительным датчиком угла, усилителем, а внешняя рамка снабжена эксцентричным грузом и на ее оси вращения установлена внутренняя рамка, причем оси вращения обеих рамок взаимно перпендикулярны, при этом плоскость качания маятника расположена в плоскости эксцентричного груза, а усилитель связан с датчиком угла и с двнгателем. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 459583, кл. Е 21 В 47/02, 1973. 2.Авторское свидетельство СССР № 620588, кл. Е 21 В 47/02, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| Устройство для ориентирования датчиков в скважине | 1983 |
|
SU1137190A1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Инклинометр | 1976 |
|
SU868056A1 |
| Устройство для измерения азимута скважины | 1976 |
|
SU709805A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |
| Устройство для измерения угловиСКРиВлЕНия СКВАжиН | 1979 |
|
SU832079A1 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |