Изобретение относится к несоизме- рительной технике и может быть использовано для измерения массы за, транспортируемого ленточными или другими конвейерами, в непрерывных дозаторах с аналоговьгми склоидмери- тельными датчиками.
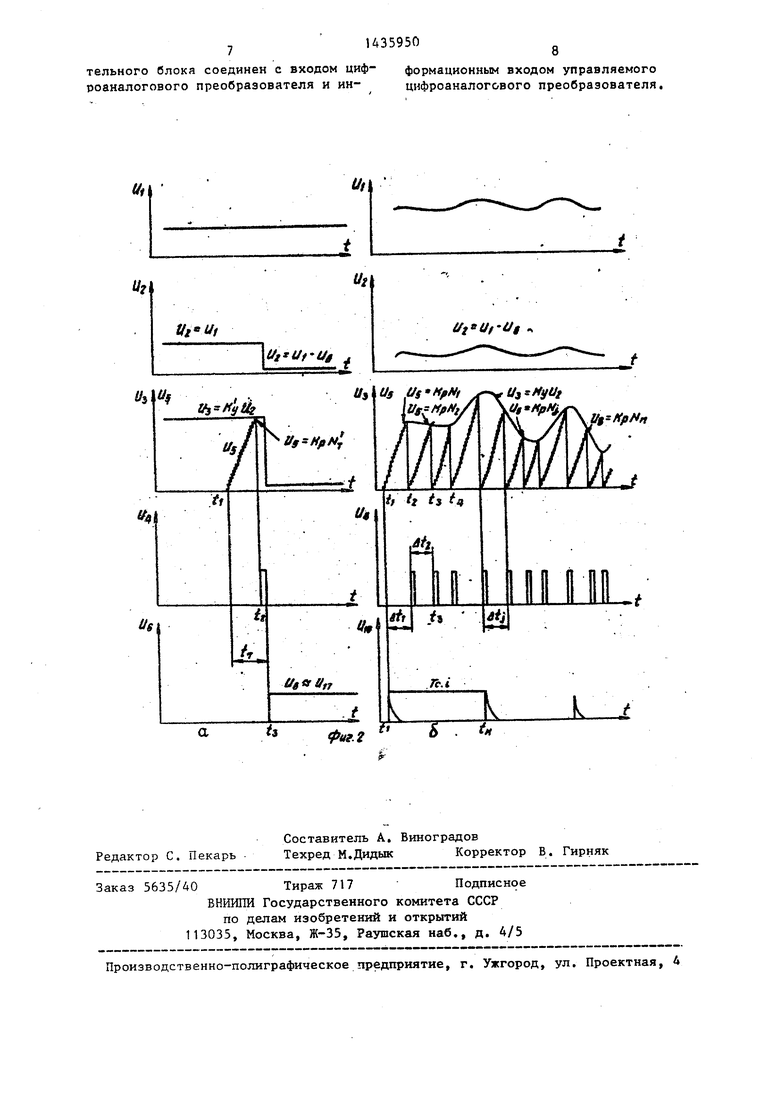
Цель изо бретения повышение точ Мости измерения за счет растягивания диапазона измеряемой величины при Преобразовании сигнала датчика, веса, I На фиг. 1 приведена схема устрой- jCTBa; на фиг. 2 a,fi - временные диаг- |раммы работы устройства соответствен|но в режиме тарирования и -измерения |массы.
Устройство.содержит аналоговый |датчик 1 веса, сумматор 2, усилитель 3 с переменным коэффициентом усиле- ;HHHj компаратор 4, иифроаналоговый преобразователь (ЦАП) 5, управляемьш ;11Д11 6 с элементом намяти., микропро- цессорный вычислительный блок 7, :снабженный интерфейсом 8 ввода-вьшо-- да, индикатор 9 результата взвешива- :ния и импульсный датчик 10 скорости конвейера,
Устройство работает следующим образом.
Работа устройства осуществляется IB двух режимах: Тарирование и Из- :мерение.
: В режиме Тарирование (фиг. 2 а) .i определяется напря кение U(U :которое затем подается на второй вход сумматора 2 для компенсации массы тары, и вычисляется в микропроцессорном вычислительном блогсе 7 начальный диапазон измеряемой величины при преобразовании сигнала датчика 1 веса. Для этого сигнал с датчика 1 вес и, K,g(t)i, где К, -.коэффициент преобразования; g(t) - погонная масса., поступает на первый вход сумматора 2 на второй вход сумматора 2 в этот момент не подается никакое напряжение. Коэффициент передачи сумматора 2 по первому входу равен единице и, следовательно, напряжение на выходе сумматора 2 полностью совпадает с сигна лом датчика 1 веса, т.е. 11 1), (фиг. 2). На управляющий вход усилителя 3 с микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вьгоода подается сигнал./ уста- навливающий коэффициент усиления уси лителя 3 равным начальному К , Напряжение IU
,
с выхода усилителя
0
5
5
0
5
поступает на первый вход компаратора -4,
В момент времени t (фиг. 2) на информационные входы 11АП 5 и 6 микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода с частотой, тактируемой встроенным в микропроцессорньй вычислительный блок 7 генератором, выставляется последовательно наращиваемый код N
(Oj 1,2j35 .„ s,) 2 результате на выходе ЦА11 5 появляется напряжение, пропорциональное коду N(Us ). Это напряжение подается на другой вход, компаратора 4..
В момент времени t-i (фиг. 2) постоянно возрастающее напряжение U становится равным напряжению на первом входе компаратора 4 и происходит срабатьшание компаратора 4. При этом импульс с вьшода компаратора 4 через интерфейс 8 ввода-вьшода поступает в микропроцессорный вычислительный блок 7, прекращается наращивание кода N на информационных входах ЦАП 5 и 6, а в ОЗУ микропроцессорного вычислительного блока 7 запоминается код N|J пропорциональный массе тары (напряжению U датчика 1 веса).
В момент времени tj с микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вьшода на зшравляющий вход управляемого ЦАП 6 поступает сигнал, по которому в элементе памяти цифрозт1равляемого ЦАП 6 запоминается код Nj., а на выходе управляемого ЦАП 6 появляется напряжение и .(U KpN). Это напряжение поступает на второй вход сумматора 2 (коэффициент передачи по этому входу также равен 1) таким образом, что напряжение на выходе сумматора 2 равно разности напряжений на его входах.
и,
т «е
времени матора 2
Г
и о Поэтому в момент
Ч
напряжение на выходе сум50
u.Ui- и и,- и о
и компаратора 4 (код N на информационных входах ЦАП 5 и 6 сбрасьгоа- ется, сигналы на входах -компаратора 4 отсутствздат).
Затем в микропроцессорном вычислительном блоке 7 вычисляется начальный диапазон изменения измеряемого сигнала при преобразовании сигнала датчика 1 веса
. ыМ ц-,к N - N.,
где N - максимально допустимый
входной код ЦАП 5. Для более точного определения напряжения U{, компенсации массы тары тарировочные циклы t под управлением микропроцессорного вычислительного блока 7 могут быть выполнены несколько раз (например, за полный оббег ленты конвейера), а затем в микропро- IQ цессорном вычислительном блоке 7
определяют среднее значение N .
V т п Z- N., которое выставляется на
i 1
информационный вход управляемого 15 ЦАП 6,
Режиму Измерение непосредственно предшествует определение в микропроцессорном вьиис.лительиом блоке 7 ко-эффициента усиления К, и соогвет- 20 ствующего ему управляющего сигнала для усилителя 3, которые обеспечивают растягивание диапазона измерения
полезного сигнала датчика 1 веса U.,,
,, на всю шкалу входного кода .г.:
ЦА11 5, Тем самым обеспечивается высокая точность измерения значения сигнала И, датчика 1 веса.
Значение 4Nyj может приниматься равньм N ,,,а«с ( f.e, 11 К1 0), Однако обычно масса тары полностью не компенсируется (U принимается несколько меныпш напряжения 11 ) , так как в противном случае даже не-- значительное колебание массы тары может привести к переходу работы матора 2, усилителя 3, компаратора А в. область отрицательных напряже,ний. В этом случае значение /IN
25
30
35
40
определяют как
4N
мзм
г
Тогда коэффициент К усилителя 3 для режима Измерение определяется как
м тткт
(( ,, I - ,,
Ь
iji макс т
Для вычисленного значения коэффициента К у микропроцессорный вычислительный блок 7 формирует управляющий сигнал, который через интерфейс 8 ввода-вьшода подается на управляющий вход усилителя 3.
В режиме Измерение (фиг. 2 б) импульсы от датчика 1 О скорости конвейера с частотой f|.(t), пропорциональной скорости движения ленты конвейера, через интерфейс 8 ввода-вывода- поступают в микропроцессорный вычислительны блок 7, в котором по длительности периода Т, . поступления импульс1эв определяется ско рость Vcp.; дв1-гжения ленты на интервале T.i ,
V Т /Т
ср. i- / J- с. 1
где L отрезок пути, при прохождении которого лентой конвейера датчик 10 скорости конвейера вырабатывает очередной импульс.
Сигнал от датчика 1 веса поступает на первый вход сумматора 2, на второй (вычитающий) вход сумматора 2 подается напряжение 1Ь U , С выходя сумматора 2 напряжение l,j Ь , П подается на вход усилителя 3; где оно усиливается в К раз, а затем поступает на первый вход компаратора 4 .
в момент времени t (в микропроцессорный вычислительный блок 7 поступил импульс с датчика 10 скорости онвейера) на информационные входы АП 5 через интерфейс 8 ввода-вывода с микропроцессорного вычислительного блока 7 начинают выставляться последовательно возрастающие коды N (0,1 5,2, ... ,N) . На выходе 11АП 5 при этом появляется напряжение
Uj KpN, где Кр - коэффициент преобразования, которое поступает на другой вход компаратора 4. При совпадении напряжений II j и на входах компаратора 4 (момент времени
t) на выходе его появляется высокий уровень напряжения, который через интерфейс 8 ввода-вывода фиксируется в микропроцессорном вычислительном блоке 7. При этом в ОЗУ микропроцессорного вычислительного блока 7 заносится значение кода N, пропорциональное сигналу датчика 1 веса в данный момент (t) и время dt. измерения (преобразования) сигнала датчи50
55
ка 1 веса, после чего код N на информационных входах ЦАП 5 сбрасьюа- ется, а затем начинает последовательно возрастать (N - О, 1, 2, ., . ,Nj,Bkc) , т.е. начинается новый цикл (dt.) измерения сигнала датчика 1 веса. Одновременно в микропроцессорном вычислительном блоке 7 вычисляется и запоминается в отдельной ячейке памяти произведение N.,dt,.
По мере увел1«ения кода N у1зели-- чивается напряж(2ние U на вьгкоде ЦАП 5 и, когда оно достигнет значв ния напряжения Uj на выходе усилителя 3, вновь срабатывает компаратор 4 Через интерфейс 8 ввода-вьшода это фиксируется в микропродессорном вы- числительном блоке 7j в ячейках ОЗУ микропроцессорного вычислительного 7 запоминаются значения N
2
брока
и микропроцессорный вычислитель ньй блок 7 начинает следуклций цикл п|реобразования сигнала веса в1 код. При этом в микропроцесссрном б|локе 7 производится суммирование п|роизведения N-.dty со значением, р1анее ползгченньм в предыдущем цикле Цзмерения.
; В момент времени t, (фиг, 2 б) ч|ерез интерфейс 8 ввода-вьшода на в|ход микропроцессорного вьиислитель- нрго блока 7 поступает импульс с дз.т ч|ика 10 скорости конвейера, по которому в микропроцессорном вычислительном блоке 7 производится вычис- л1ение средней скорости .- и перемножение значения Vj,p ; на накоп- m
ленную сумму zl N.dt., где та - коли™ J J
чество циклов измерения (преобразования) S, уложившихся в период време- йи Т. ,
, В результате масса груза М, , пере Йещенная конвейером за время; определяется как m
М,
,, N..t.
.J f)
где К , - коэффициент преобразования,
Полученное значение М. запоминается в ОЗУ микропроцессорного вычислительного блока. 7 для последуюп1его суммирования со следующими зь1числен- ными частичными массами«
Таким образоМэ процессо э микропроцессорного вычислительног.о блока 7 после прихода очередного импульса от датчика 10 скорости производит обработку информации за предшествзгющий интервал измерения Т . э Тге, вычис- jsaHHe скорости движения ленты Vcp.i определение частичной массы М- и накопление р е 3 ульт а т а в з в ешиз а ни я„ Одновременно продолжают осуществлятг ся измерения j-x значений сигнала датчика 1 веса тек ущего интервала измерения
Так как с т 1мироБание вычисленных значений масс производится периоди™
necKjti с частотой f с j , то результи- ру5ощая масса груза Мр, перемещенная конвейером за время взвешивания €, равна
е m
Мр К и
cp.i
;3t.,
J--
где 1 - количество.импульсов датчи- ка 11 скорости конвейера, поступивших на вход микропроцессорного вычислительного блока 7 за время Е
( 5 У т . )
Ь / -I- i / о
Результат вычисления массы груза Мр из микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вьгоода поступает на индикатор
9 результата взвешивания, по показанию которого можно судить о массе груза5 перемещенного конвейером,или может постуцать на исполнительные механизмы для управления процессором дозирования транспортируемого конвейером материала,
о ормула изо бретения
Устройство для измерения массы, содержащее микропроцессорный вычислительный блок с индикатором, датчик веса и импульсный датчик скорости конвейера, .соединенный с одним из
входов микропроцессорного вычислительного блока, отличающееся тем, что, с целью повышения точности измерения за счет растягивания диапазона измеряемой величины,
в него введег ы последовательно соединенные сумматор, уснлитель с пере- менньзм коэффициентом усиления и компаратор, а также два цифроаналоговых преобразователяJ один из которых
:1ТГ1равляемый с элементом памяти, причем первый вход сумматора соединен с датчиком веса, а второй вход - с выходом управляемого цифроаналого- вого преобразователя, выход цифроаналогового преобразователя подключен к второму входу компаратора, выход которого соединен с вторым входом микропроцессорного вычислительного блока, к первому выходу которого подключен управляющий вход уси- лителя к второму выходу - управляй- щий вход управляемого цифроаналого- вого преобразователя, а информационный выход микропроцессорного вычислн11435950
тельного блока соединен с входом циф- формационным входом управляемого роаналогового преобразователя и ий- цифроаналогового преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения массы и управления потоком сыпучего материала | 1987 |
|
SU1525475A1 |
| Суммирующие конвейерные весы | 1983 |
|
SU1117455A1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Фотометр | 1984 |
|
SU1200137A1 |
| Цифроаналоговый преобразователь с автокалибровкой | 1986 |
|
SU1361720A1 |
| Устройство для измерения ширины полосовых и рулонных материалов | 1985 |
|
SU1242710A1 |
| Устройство для контроля линейной плотности волокнистых материалов | 1987 |
|
SU1451597A1 |
| Устройство для логарифмирования отношения сигналов | 1985 |
|
SU1300506A1 |
| Устройство для измерения динамических характеристик цифроаналоговых преобразователей | 1987 |
|
SU1524173A1 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
Изобретение может быть использовано для измерения массы груза, транспортируемого ленточными или другими конвейерами. Цель изобретения - повышение точности измерения за счет растягивания диапазона измеряемой величины при преобразовании сигнала датчика веса. Сигнал с датчика 1 веса поступает на первый вход сумматора 2, на второй (вьиитающий) вход которого подается напряжение с выхода з правляемого цифроаналогового i преобразователя (ЦАП) 6 с памятью, пропорциональное массе тары. Это напряжение определяется в режиме тарирования при коэффициенте усиления К У усилителя 3 с переменным коэффициентом усиления. При отсутствии нагрузки на датчик 1 веса на выходе сумматора 2 - ноль или величина, . близкая к нулю. При появлении нагруз ки на выходе сумматора 2 появляется напряжение, которое усиливается уси лителем 3 в к раз и подается на вход компаратора 4. На другой вход компаратора 4 поступает возрастающий сигнал с выхода ЦАП 5. При совпадении значений сигналов на обоих входах компаратор 4 срабатывает и в микропроцессорном вычислительном блоке 7 фиксируется код N, подаваемый в этот момент на вход ЦАП 5, который пропорционален сигналу датчика 1 веса. Коэффициент усиления К для усилителя 3 в режиме измерения вычисляется в микропроцессорном вычислительном блоке 7 и принимается таким, чтобы оставшийся после компенсации массы тары диапазон полезного сигнала датчика 1 веса полностью растянулся на шкале входного кода ЦАП 5, 2 ил. ( 4&E3s:a
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ ГАЗИРОВАННОЙ ВОДЫ | 1986 |
|
RU2008773C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Конвейерные весы | 1981 |
|
SU979879A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
