(54) КОНВЕЙЕРНЫЕ ВЕСЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения массы и управления потоком сыпучего материала | 1987 |
|
SU1525475A1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Устройство для измерения массы | 1986 |
|
SU1435950A1 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
| Конвейерные весы | 1987 |
|
SU1500848A1 |
| Электронные конвейерные весы | 1977 |
|
SU684319A1 |
| Весы | 1989 |
|
SU1783314A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА, ТРАНСПОРТИРУЕМОГО КОНВЕЙЕРОМ | 2024 |
|
RU2829033C1 |
| Способ определения производительности конвейера и суммарного веса материала и конвейерные весы | 1982 |
|
SU1041877A1 |
| Устройство для дозированной загрузки по массе вагонов сыпучим грузом | 1983 |
|
SU1137326A1 |
Изобретение относится к весоизмерительной технике и предназначено для непрерывного взвешивания груза, транспортируемого ленточными конвейерами ,
Известно взвешивающее устройство, содержащее датчик, микровычислительное устройство и индикатор, позволяющее с помощью выполнения в микровычислительном устройстве определенных операций измерить BecLl.
Наиболее близкими по технической сущности к предложенным являются конвейерные весы, содержащие датчик веса, подключенный через разрешающую схему к входу интегратора, й датчик скорости123.
Недостатком известного устройства является сравнительно низкая точность измерения, обусловленная тем, что определенную часть периода измерения не производят, т.е. информации о нагрузке в счетчик не подается.
Целью изобретения является повышение точности за счет обеспечения непрерывности взвешивания.
Для достижения поставленной це- . ли в весы введены микропроцессорный вычислительный блок с индикатором, при этом входы микропроцессорного .вы-1
числительного блока -соединены с выходами интегратора и датчика скорости, а выходы - с вторым входом разрешающей схемы и входом установки нуля интегратора.
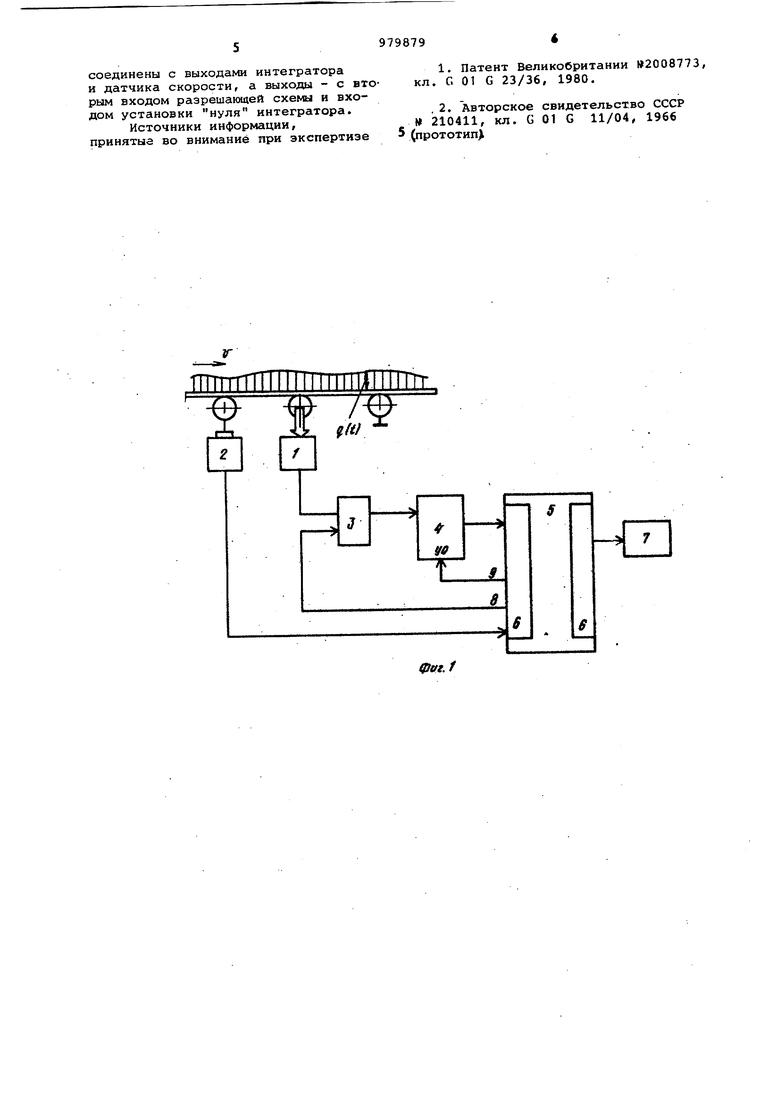
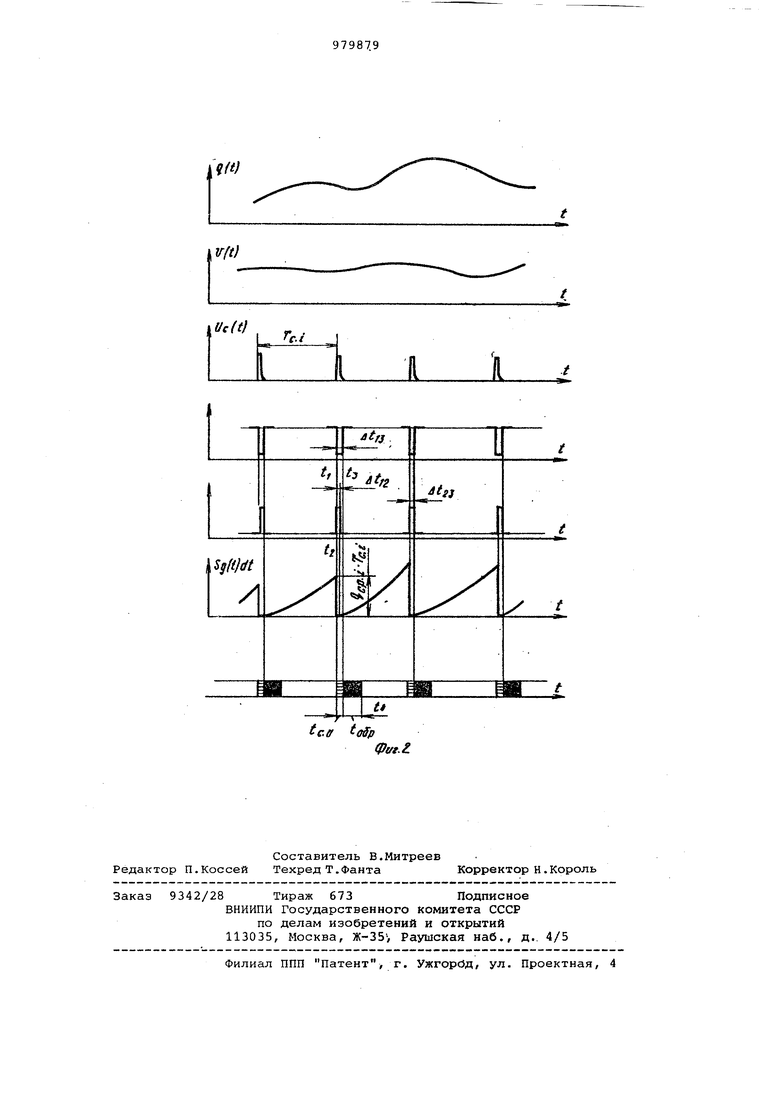
На фиг.1 приведена схема весов, на фиг.2 - временные диаграммы работы, конвейерных весов ( где -tcs- время считывания информации с интегратора и установка его в ноль, время обработки информации в микропроцессорном блоке).
Конвейерные весы содержат датчик 1 веса, импульсный датчик 2 скорости, разрешающую схему 3, интегратор 4, микропроцессорный вычислительный блок 5, снабженный интерфейсами 6 ввода-вывода, и индихатор 7 результата взвешивания. Микропроцессорный блок содержит микропроцессор, постоянную память ( ПЗУ) оперативную память (ОЗУ) и др. элементы и предназначен для управления..процессом взвешивания, а также для выполнения арифметических вычислений.
Импульсы от датчика скорости 2 с частотой fc (t.) , пропорциональной скорости движения ленты конвейера, через интерфейс 6 ввода-вывода поступают в микропроцессорный вычислительный блок 5, в котором по длительности периода Т.поступления импуль сов определяется средняя скорость движения ленты конвейера на интерва ле времени Т. g отрезок пути, при прохожде нии которого лентой конвей ра датчик скорости 2 выра. батывает очередной импульс При этом в течение времени Т . си нал от датчика 1 веса поступаетVeрез разрешающую схему 3 на вход интегратора 4. Для этого на второй вход разрешающей схемы 3 через интер фейс 6 -ввода-вывода с микропроцессорного вычислительного блока 5 по ;стоянно поступает разрешающий (опорный) сигнал. При появлении очередно го импульса датчика скорости 2 по команде с микропроцессорного вычислительного блока 5 (момент времени t) опорный сигнал на линии 9 связи исчезает на короткое (порядка долей миллисекунд), время At t - t. В течение времени At,j. 7 микропроцессорным вычислительным бло ком 5 через интерфейс б ввода-вывода производится считывание кода с выходных шин интегратора 4. Значение этого кода пропорционально интегралу погонной массы (i) за период времени Tj-j между поступлением импульсов от датчика скорости 2. После этого, в момент времени Ь, , импульсом с ми ропроцессорного вычислительного блока 5 через интер1|1ейс б ввода-вывода (линия 9 связи ) интегратор 4 устанавливается в ноль. При использовании частотного датчика 1 веса интервал времени течение которого разрешающая схема 3 заперта для прохождения сигнала от датчика 1 веса и.осуществляется сброс в ноль кода на выходе интегратора 4, выбирается меньше длительности минимально возможного периода следования импульсов от датчика i веса, в связи с чем информация от датчика 1 веса не теряется.. В момент времени -t-j на втором входе разрешающей схемы 3 вновь появляется разрешающий импульс, и сигнал от датчика 1 веса через разрешающую схему 3 продолжает поступат на вход интегратора 4. Одновременно в микропроцессорном вычислительно блоке 5 производится вычисление сред ней скорости Oj.n. и перемножение значения .на интеграл погонной массы ..(код, с;читанный с интегратора 4 в течение времени ut-ti) ° ределяется масса груза ы, , перемещен ная конвейером за время Т.-(на расстояние I) ,-Ocp.UWai.. ( При этом в микропроцессорном вычислительном блоке 5 производится также . суммирование вычисленной массы т со значением т уи, полученным в результаге выполнения предыдущих циклов измерения. Таким образом, в микропроцессорном вычислительном блоке 5 в течение времени ut- 4- э производится обработка информации за предшествующий цикл измерения, т.е. вычисление скорости движения Ьенты конвейера f определение частичной массы груза vn и накопление результата взвешивания. / Так как в микропроцессорном вычислительном блоке 5 суммирование вычисленных значений массы м производится периодически с частотой-f,: , то результирующая масса груза М , перемещенная конвейером зсС время взвешивания J cpJcvWdt, где И - количество импульсов датчика скорости 2, поступивших на вход микропроцессорного вычислительного блока 5, за время Т Ст гДтс;.}. Результат вычислении массы груза М из микропроцессорного вычислительного блока 5 через интерфейс б ввода-вывода поступает .на индикатор 7 результата взвешивания, по показаниям которого можно судить о массе груза перемещенного конвейером. Использование интегратора и микропроцессорного вычислительного блока выгодного отличают предлагаемое устройство от известного, так как позволяет повысить точность измерения массы груза, транспортируемого ленточными конвейерами, за счет устранения методической погрешности М, обусловленной отсутствием информации от датчика веса в течение времени Т - в каждом из повторяющихся с частотой цикле измерения. Кроме того, использование микропроцессорного вычислительного блока позволяет программно рёализаовать вычислительные операции по формулам (1) -(3J, выполнить которые аппаратным способом затруднительно. Формула изобретения Конвейерные весы, содержащие датчик веса, подключенный через разрешающую схему к входу интегратора и датчик скорости, отличающиес я тем, что, с целью повышения точности за счет обеспечения непрерывности взвешивания, в них введен микропроцессорный вычислительный блок с индикатором, при этом входы микропроцессорного вычислительного блока
соединены с выходами интегратора и датчика скорости, а выходы - с вторым входом разрешающей схемы и входом установки нуля интегратора.
Источники информации, принятые во внимание при экспертизе
5 (прототип)1
Vc(t)
c.t
i
1
t
fcff oSp
(pift.l
