О --(
X-yin-r3 S jS
W
ОЭ
txseu.
ю
;1436
Изобретение относится к приборостроению, а именно к технике магнитной записи, и может быть использовано в аппаратах магнитной записи с ленточным носителем и приводом каждой катушки от отдельного электродвигателя.
Цепь изобретения - повышение точ
первого 14 дифференциаторов, выходы умножитеУ ей 15 и 17 подключены к входам вьгчитателя 18, выход которого связан с поситедовательно соединенными формирователем 19 величины модуля и делителем 20, второй вход которого связан также с выходом первого .сумматора 13 и входом третьего умножите


| название | год | авторы | номер документа |
|---|---|---|---|
| Металлоискатель | 1980 |
|
SU911416A1 |
| Устройство для управления перемещением ленточного носителя записи | 1978 |
|
SU786937A3 |
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2015566C1 |
| Устройство для виброиспытаний | 1989 |
|
SU1657998A1 |
| Устройство для определения теплоемкости термозависимых элементов | 1989 |
|
SU1679331A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1985 |
|
SU1298726A1 |
| Устройство для автоматического управления торможением автомобиля в потоке | 1989 |
|
SU1661018A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКИМ ОГНЕМ ПО ДВИЖУЩИМСЯ ЦЕЛЯМ | 1997 |
|
RU2134892C1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1987 |
|
SU1471213A2 |
Изобретение относится к приборостроению, а именно к технике магнитной записи, и может быть использовано в аппаратах магнитной записи с ленточным носителем и приводом каждой катушки от отдельного электродвигателя . Цепь изобретения - повышение точности установки и регулирования средней скорости движения носителя магнитной записи. По командам движения, поступающим в блок 22 управления, через усилители 23 и 24 мощности включаются приводные электродвигатели 3 и 4 подающей 1 и приемной 2 катушек. Датчики 5 и 6 условной скорости формируют импульсы, период следования которых содержит информацию о скорости вращения катушек. Первый 7 и второй 8 преобразователи временного интервал - напряжения формируют через фильтры 9 и 10 нижних частот и квадраторы 11 и 12 сигналы, суммируемые в сумматоре 13 и умножаемые в § третьем умножителе 21 на опорный сиг-t нал. Далее формируются сигналы, соответствующие расчетной формуле с учетом периодов вращения катушек, скорости движения носителя, радиуса пустой катушки, о8щей длины носителя. 2 ил.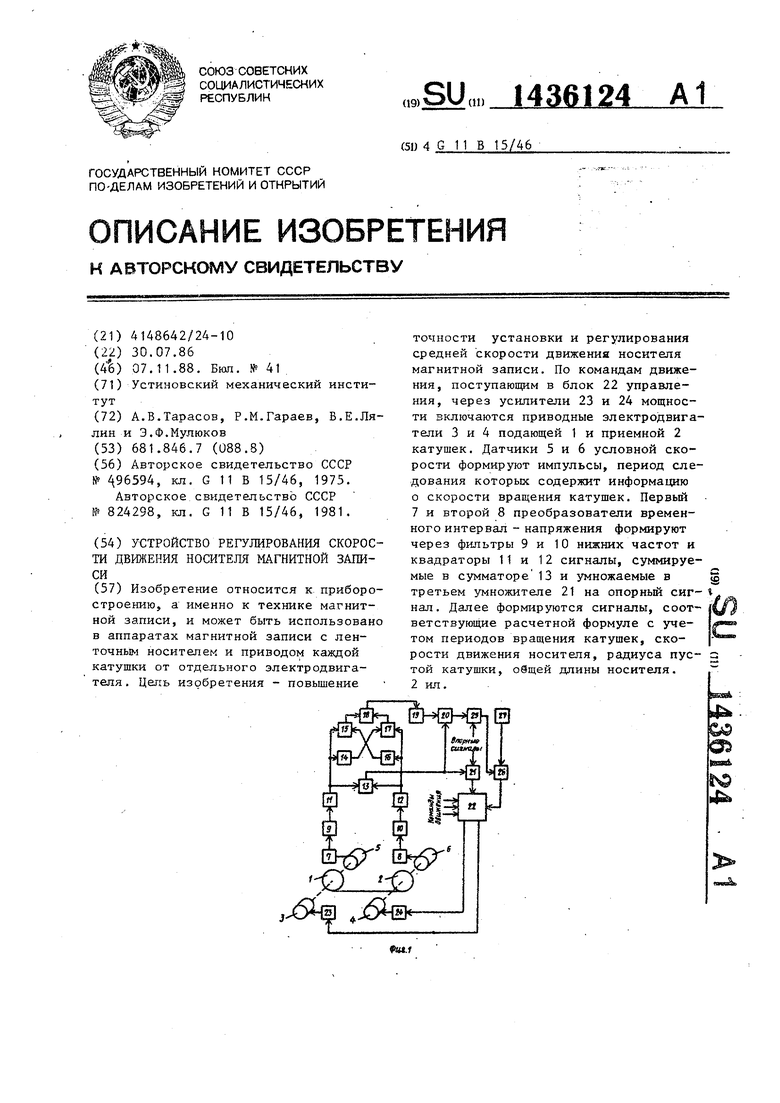
ности установки и регулирования сред- .JQля 21, подключенного выходом к первоней скорости движения носителя маг-му входу блока 22,управления, выходы нитной записи.
На фиг. 1 представлена структурная
которого соединены через усилителя 23 и 24 мощности с приводными электродви гателями 3 и 4 .
схема предлагаемого устройства: на
15
Выход делителя 20 через четвертый умножитель 25 подключен к первому входу втор.ого сумматора 26, вторым входом соединенного с источником 27 напряжения S а выходом - с вторым входом
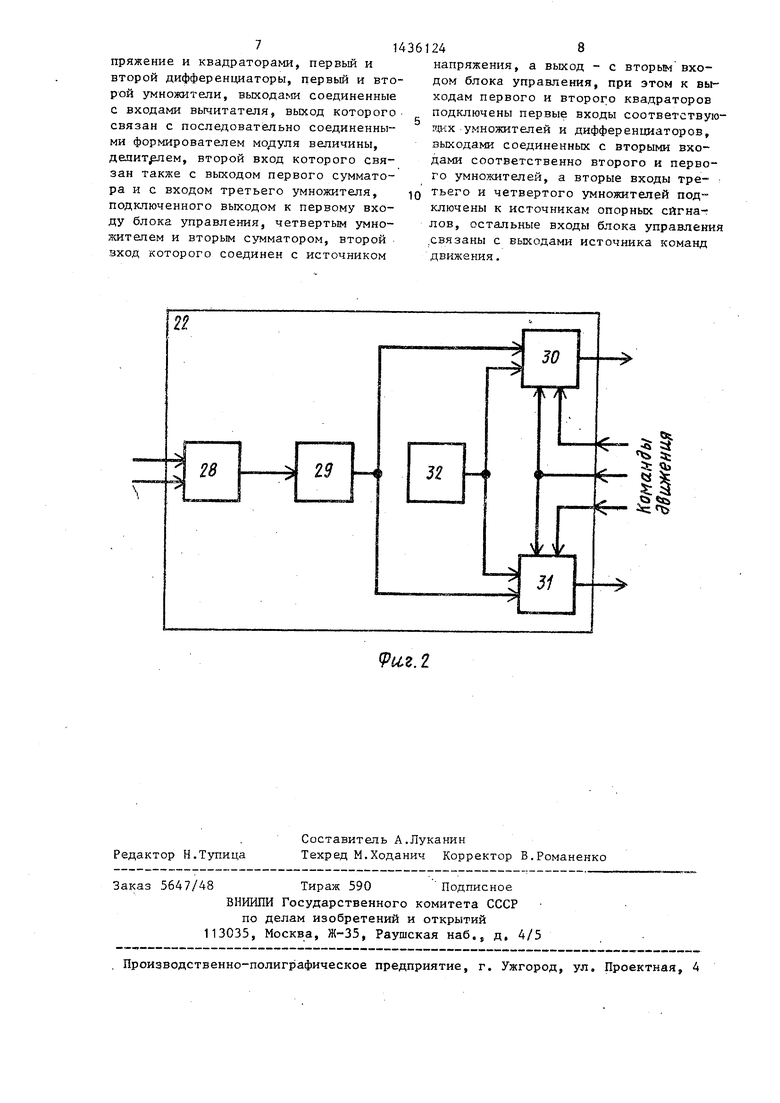
фиг. 2 - структурная схема блока управления .
Устройство содержит подающую 1 и приемную 2 катушки с магнитной лентой кинематически соединенные с приводными электродвигателями 3 и 4 и с датчи 20 блока 22 управления.
ками 5 и 6 угловой скорости, соединен- Вторые входы третьего 21 и четверные соответственно с первым 7 и вторым 8 преобразователями временной интервал - напряжение . Первьш 9 и второй 10 фильтры нижних частот (ФНЧ) включены 25 ны с источником команд движения, между выходами одноименных преобразо- Блок 22 управления (фиг.2) содержит вателей временной интервал - напряжение и входами первого 11 и второго 12квад раторов,выходы которых подключены -к входам первого сумматора 13. 30 подключены к второму источнику 32
Выход первого квадратора 11 соединен напряжения. Первьй и второй входы вто- с входом первого дифференциатора 14 и с первым входом первого умножителя 15, а выход второго квадратора 12 - с входом дифференциатора 16 и с первым входом второго умножителя 17.
Вторые входы первого 15 и второго 17 умножителей соединены перекрестно соответственно с выходом второго 16 и
35
того 25 умножителей подключены к источникам, опорных сигналов, а остальные входы блока 22 управления связавторой вычитатель 28, соединенный через регулятор 29 с первыми входами ключей 30 и 31, вторые входы которых
рого вьгчитателя 28 являются соответственно первыми и вторыми входами блока 22 управления, а выходы ключей 30 и 31 - выходами этого блока.
Сущность работы предлагаемого устройства связана с тем, что при движении носителя в нем реализуется следующее расчетное соотношение:
(Т, + Т
де Т , Т
V R.
ci периоды вращения подающей и приемной катушек соответственно; скорость движения носителя ;
радиус пустой катушки;; общая длина носителя (магнитной ленты)5
:-
d dt
оператор дифференщрова- ния по времени.55
Это соотношение получается следую щим образом.
му входу блока 22,управления, выходы
которого соединены через усилителя 23 и 24 мощности с приводными электродвигателями 3 и 4 .
Выход делителя 20 через четвертый умножитель 25 подключен к первому входу втор.ого сумматора 26, вторым входом соединенного с источником 27 напряжения S а выходом - с вторым входом
блока 22 управления.
Вторые входы третьего 21 и четверны с источником команд движения, Блок 22 управления (фиг.2) содержи подключены к второму источнику 32
того 25 умножителей подключены к источникам, опорных сигналов, а остальные входы блока 22 управления связа Вторые входы третьего 21 и четверны с источником команд движения, Блок 22 управления (фиг.2) содержит подключены к второму источнику 32
второй вычитатель 28, соединенный через регулятор 29 с первыми входами ключей 30 и 31, вторые входы которых
напряжения. Первьй и второй входы вто-
5
рого вьгчитателя 28 являются соответственно первыми и вторыми входами блока 22 управления, а выходы ключей 30 и 31 - выходами этого блока.
Сущность работы предлагаемого устройства связана с тем, что при движении носителя в нем реализуется следующее расчетное соотношение:
(1)
45
50
55
Площадь сечения S,носителя, находящегося на подающей катушке, имеющего длину ы,, равна
S 1iR2 с,.п1 +1ГЯ2,
где R, - радиус намотки носителя с
длиной ы, по подающей катушке
m - толшдна носителя (магнитной л енты).
Аналогично площадь сечения S носителя., находящегося- на приемной катушке, равна
IT R2 oi. m + 7 R2 ,
t .Л
где Rj - радиус приемной катушки;
длина ленты на приемной ка-
тушке.
Из этих соотношений выразим сумму квадратов радиусов катушек, приняв во внимание, что od
fJr
Ц н- R| «f ч- 2R2
(2)
гдеср, и (f - углы поворота подающей 1 Кроме того, радиусы подающей и прием-и приемной 2 катушек,
ной катушек могут быть определены как Знак минус в первом вьчзаженни взят
ввиду уменьшения радиуса подающей каvTi
I-ir
R - 1 i 21Г
Подставив эти значения в (2), получим
4lf2
otm
- Т 2R
или
T2 + T|
AlTetm +
Продифференцируем левые и правые части выражений (3) и (4)
dR( dt
Tj dv V dTi .
Zlr dt 27 dt
Ti dv V
- - + -
21 dt
dT
2-4 dt
Левые части обоих уравнений преобразуем следующим образом:
(Т2 + T2)(Y)2 - Y
U, + Ч- R/R2
Vо
в известном устройстве, в основу. .В предлагаемом устройстве искпючаработы которого положена расчетнаяется погрешность, связанная с отклоформула (5), на точность регулирова-gg нением фактической толщины ленты от
ния скорости влияют отклонения от но-номинала и ее разнотолщинностью в руминалов трех величин длины oi.носителя.лоне. Указанная погрешность может досего толщины m и радиуса R пустой ка-тигать 15% и, следовательно, при ее
тушки. исключении.повьш1ается точность уста10
20
тушки.
Решая совместно (6) и (7), исклюdvчив из них -, и учитывая (8) и (9),
получим
- (Т1 -Ч) . |-(i; 4F - т| Sgii)
m
dllil
v Jidt i dt
+ T2
При обратном движении ленты величина числителя второго сомножителя становится меньше нуля, поэтому, чтобы 25 оперировать только с положительными значениями толщины, необходимо брать только абсолютное значение числитедя. ;Поэтому
40
m
d(T,)
Т
L2
dt
d(T,z)
- Т
2 dt
4ff
X2 + X
. г
(10)
45
Решив совместно (10) и (5) и исключив т, получим расчетную формулу (1)
d(T,2)
Т2
2dt
Т|
+ SiTz.
51
новки и регулирования средней скорос- , ти движения носитепя магнитной зап;-: -- си.
Устройство работает сладукяцим об.- раэом.
По командам движения (Вперед или Назад), поступа.кгаги;Н в блок 22 управления через усилители 23 и 24
мощности .включаются приво,;1.кые
Фодвигатели 3 и 4 соответственно по-- |дающей 1 и приемной 2 катушек, Датчи- UH 5 и б угловой скорости Форкьгруют 1последоваталькость сигналов ( ICOB). период следоваш1я которых со- {держит ИНФОРМ8.ЦИЮ о cKOpoir -и враще- Iния катушек. Первь й 7 и второй 8 пре |образовател:и временной интервал - ка- . iпряжение форми;ру1от сигнальи поступсШ- |щие через первьй 9 н второй 10 фильт- |ры нижних частот на первый 11 и вто- |рой 12 квадраторЫ; вьшодкые сигналы I которых пропор дионапьны Т и Т . Эт;1 сигналы су1У1МИруются в первом сумма- iTope 13 и умножаются в тратьем умно-- жителе 21 на опорньй cHi Haib, rsponop-- i циональный /V .
I Таким образом, на первый вкод бло- i ка 22 управления поступает сигнал,, пропорциональньм
(Т -f Тр (-)2 о
соответствз ющии левой части расчет-: ; ной формулы ( 1) .
: Сигналы с вь ходоБ первого 1 i и второго 12 квадраторов и ати скгнглъ,, продифференцированкые первьЕп 14 и в д о- рым дифференциатораГ Ш,, перекрестно поступающие на вторые входы первого и второго умножат елей, умножаются в последних, при этом фо;пмиру1ртся сиг налы пропорциональные
Т. diI5-) ,- ....
......,-,, г..
- dt
Эти сигналы вычитаются з вьлита-те- ле 185 фор шрователь 19 формирует абсолютное значение этого р.азностного сигналаJ в делителе 20 ос.ущаствляат- ся его деление на сигнал, поступающий с пер в 01 о сумматора 13, .при этом выходной сигнал делителя ЛГ ОПорцнонален отношению сигналов на егс: входах
dCn)
йСтЦ/
Т|
24
Этот сигнал умножается в четвертом умножителе 25 на опорный сигнал,
пропорциональный pj и во втором
0
сумматоре 26 суммируется с опорным сигналом, пропорциональным SIT , поступающим с источника 27 напряжения. Выходной сигнал второго сумматора 26 пропорционален соотношению
Т2 uLlil
dtг dt /
+ s-r
X2 +
Ti
.., 5
5
5
и соответствует правой части расчетной формулы. Этот сигнал поступает на второй вход блока 22 управления, где во втором вычитателе 28 происходит /его сравнение с сигналом, поступающим на первьй вход с третьего умножителя 21, Выходной сигнал через регуля гор 29S который предназначен для по- л учекия заданной переходной характеристики регулирования скорости движения носителя, либо напряжение второго источника 32 напряжения коммутируется ключами 30 и 31 в зависимости от команд движения (ускоренной перемотки или стабильного движения ленты Вперед или Назад). Сигналы этих ключей через усилитель 23 и 24 мощности включают соответствующий приводной электродвигатель.
Формула изобретения
Устройство регулирования скорости движения носителя магнитной, записи, содержащее приемную и под ающую катушки, каждая из которых кинематически соединена с приводным, электродвигателем и датчиком угловой скорости, блок управления, соединенньй через уси-пители мощности с приводнь ми элек- тродвигателя№1, первьй и второй преобразователи временной интервал - напр яжениеэ подключенные к выходам датчиков угловой скорости соответственности приемной и подающей катушек, первый и второй квадраторы, выходами соединенные с входами сумматора, отличающееся тем, что, с целью повышения точности регулирования средней скорости движения носителя j в него введены первый и второй фильтры нижних частот, включенные между выходами соответствующих преобразователей временной интерваг - на71436
пряжение и квадраторами, первьш и второй дифференциаторы, первый и второй умножители, выходами соединенные с входами вьгчитателя, выход которого связан с последоват1гльно соединенными формирователем модуля величины, делит ем, второй вход которого связан также с выходом первого сумматора и с входом третьего умножителя, Q подключенного выходом к первому входу блока управления, четвертым умножителем и вторым сумматором, второй тзход которого соединен с источником
1248
напряжения, а выход - с вторым входом блока управления, при этом к выходам первого и второго квадраторов подключены первые входы соответствую- гчих умножителей и дифференциаторов, выходами соединенных с вторыми входами соответственно второго и первого умножителей, а вторые входы тре- : тьего и четвертого умножителей подключены к источникам опорных сигналов, остальные входы блока управления .связаны с выходами источника команд движения.
9U.Z.1
| Машина для резки овощей, например, баклажан | 1953 |
|
SU96594A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Накопитель на магнитной ленте | 1979 |
|
SU824298A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
