14;
О9
Од
ьэ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с упругой механической связью | 1984 |
|
SU1275723A1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Управляемый электропривод | 1980 |
|
SU1034016A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2017 |
|
RU2659370C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах кранов, драглайнов. Целью изобретения является упрощение схемы и наладки электропривода и по- вьшение эффективности гашения колебаний Б упругой связи в условиях нестабильности собственной частоты этих колебаний. Устройства содержит интегратор 9, вход которого подключен к выходу датчика 7 тока, а выход - к второму входу сумматора 8. Выход сумматора 8 соединен с входом регулятора 4 скорости и с входом регулятора 5 тока, В данном устройстве обеспечивается гашение колебаний в условиях нестабильности собственной частоты колебаний, так как демпфирующий сигнал на выходе узла параллельной коррекции формируется в функции скорости и тока электродвигателя в соответствии с реальным значением этой частоты, 2 ил. ь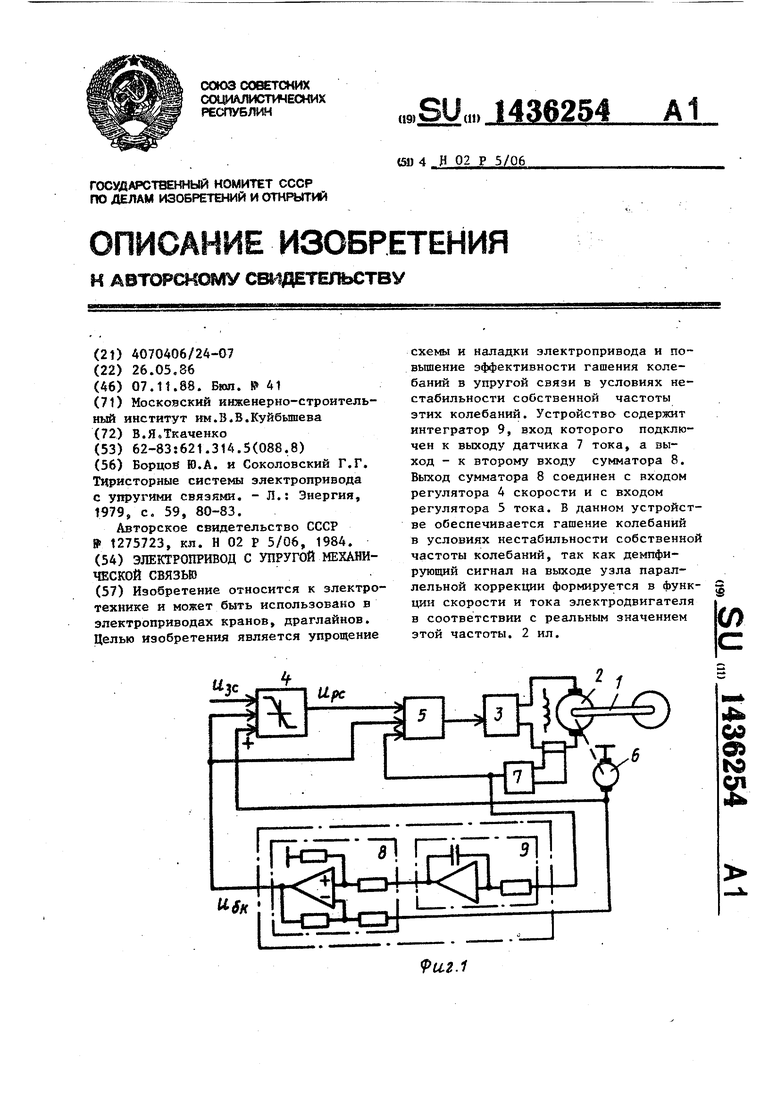
9U2.1
ИзбЪретёние относится к электротехнике, а именно к электроприводам с упругой связью между двигателем и механизмом, и может найти примене- ние в электроприводах драглайнов, кранов, подъемников, испытательных стендов и бумагоделательных машин.
Цель изобретения - упрощение схем и наладки электропривода и повышение эффективности гашения колебаний в упругой связи при нестабильности собственной частоты этих колебаний.
На фиг. 1 приведена функциональная схема электропривода; на фиг. 2 графики переходного процесса при разгоне электропривода, поясняющие его работу.
Электропривод (фиг. 1) с упругой механической связью 1, содержащий электродвигатель 2 постоянного тока аодшюченш к У1фа вяя«щему преобра- йоватеяю 3, в цепь зшравления которого включены соедииенные последовательно регулято| ы скорости 4 и тока 5, по кйкгчёишйе к входам соответствующих регуляторов датчики скррорт 6 и тока 7, 8 также сумматор 8, сое- даненный однш своим входом с выходом датчика б скорости, а вьосодом - с вторым входом регулятора 5 тока, и инвертор 9, СВОИМ входом подключенный к выходу датчика 7 тока, а выходом - к второму входу сумматора 8, выход которого соединен также с входом регулятора 4 скорости, при этом постоянная времени интегратора 9 Т выбирается равной ,
м
A
Т . il4-J: M.K«jL
« КмКд.с
где , К. - передаточные коэффициенты датчиков скорости и тока; 1 - моменты инерции
электродвигателя и механизма;
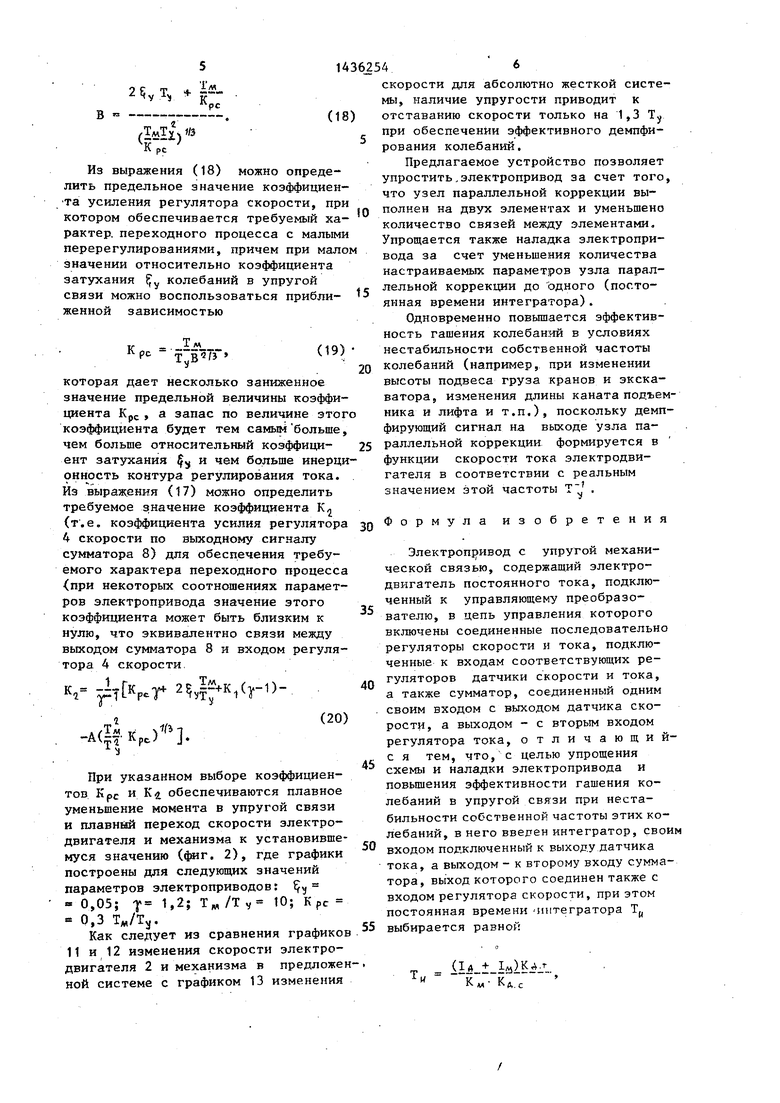
К - коэффициент пропор- циональноети мелду током и моментом электродвигателя. На фиг. 2 приведены два режима разгона электропривода графика изменения момента М ч) в упругой связи (график 10), скорости ЮдЭлектродвигателя (график 11) и скорости WM механиэма (график 12), а также для сравнения (график 13) изменения скорости электродвигателя и механизма при абсолютной связи между .
Электропривод работает следующим образом.
Постоянная времени интегратора 9 выбирается равной механической постоянной времени
м
.- м1БА1.
(1)
д.с
численно равной времени разгона электропривода с абсолютно жесткой связью между электродвигателем и механизмом до номинальной скорости с номинальным моментом.
где К
К.
Л.С f
А
- передаточные коэффициенты датчиков скорости 7 и тока 8,| 1 . - моменты инерции
электродвигателя и механизма;
Сд Ф - коэффициент пропор- )циональности между током и моментом электродвигателя. При выборе коэ1|)фициентов усиления сумматора 8, равными единице, по обоим входам его выходное напряжение определяется уравнением
и.
К
1«;5;-Кл.си;, . (2)
40
35 где
Ч ток электродвигателя; р - оператор Лапласа. Учитывая, что связь между током I g и скоростью л электродвигателя определяется зависимостью
КА
Ы.т
АГ--Р.liL aJlElIk :.. (3)
U2 vTvP+T pY
где Т
С v
Г 1д1/«
м 1 дт --7-г постоянная
V 1С(Ц+1л,)Л времени упругой связи; жесткость упругой связи; относительный коэффициент затухания колебаний в упругой связи;
1 + -- -коэффициент отноЛ шения масс.
Из вьфажений (2) и (3) исходит, что выходное напряжение сумматора 8 определяется следующей передаточной функцией относительно скорости электродвигателя СОд:
.Убк. piTi(i3l).
.c
.1+1ЬТ,рч-Т,|р
Выходной сигнал сумматора 8 поступает на вход регулятора 5 тока с коэффициентом К и на вход регулятора 4 скорости с коэффициентом К, которые подлежат выбору.
При подаче на вход регулятора А скорости сигнала и задания скорости его выходной сигнал U р практически скачком увеличивается до максимального значения, определяемого ограничением его выходного напряжения, и остается постоянным. Учитывая, что параметры движения электропривода в зависимости от входного сигнала регулятора 5 тока Uex.pT ирс-1 рк.К определяются передаточными функциями (при малой инерционности контура регулн- рования тока по сравнению с постоянной времени упругой связи)
См
ЬГг
Г-1
f
1
,
1 1 f м 1 +2 ,, р+Т§р l
- 1 1+2
BX.F кГс pT« T p+if;
с учетом влияния на регулятор скорости вьгходного сигнала, определяемого передаточной функцией (4), можно установить, что в указанном режиме изменения параметров движения электропривода характеризуется передаточными функциями
MV
7 с«Ф7к;;
til
и
1
ц
Di(p) .i 4 1 . Il2b TvElTvlti
РС/КАС рТл, D;(P)
hi l. PC
Uo. /Кдс
рТд, D(p)
где D,(p)
У -
Tv(-l)
г
K,p (11)
Как следует из выражения (11), для обеспечения требуемого относительного коэффицие21та затухания J
(например, ( 2/2) коэффициент
оссто1436254
обратной связи К, характеризующий влияние выходного сигнала сумматора 8 на регулятор 5 тока, следует выбирать из зависимости
(4)
2(т, Т
-5у )Хм
vTrfT
(12)
10
При этом момент My в упругой связи плавно с перерегулированием меньше 5% возрастает до установившегося значения (фиг. 2, график 10), а скорости двигателя ui (график 11) IS и механизма ы,(график 12) так же плавно переходят к нарастающему графику (к равноускоренному движению),
При приближении скорости электропривода к установившемуся значению регулятор 4 скорости переходит на линейные участки его характеристики, а изменение параметров движения электропривода с учетом воздействия выходного сигнала сумматора 8 на вход регулятора 4 скорости при этом характеризуется передаточными функциями
20
25
Mji
30
д.т
21-1
г
Тм
)
(13)
и777к
U)A li2 5 y T iTvXE А.с
оДр)
(14)
Ii2JijLTitE
%с/Кдр где Do(p)
В/г(р)
1 2 iVi;: (15)
Т« -рс
40
ij:(rO(K,-K,p
(16)
,&ЙЕ1.
Kpc
45 Изменение структуры электропривода на этом этапе движения требует и другого подхода к выбору его параметров, который может быть вибран, например, по заданным значениям коэффи50 циентов Вышнеградского, которые целесообразно выбирать равными 2,2-2,4, Значения этих коэффициентов при указанных в выражении (16) коэффициентах характеристического уравнения систе55 мы определяются зависимостями
, . А
К}.(17)
2
т
у (
В
+ IlS
V
ф1ц
л рс
Из выражения (18) можно определить предельное значение коэффициен- та усиления регулятора скорости, при котором обеспечивается требуемый характер, переходного процесса с малыми перерегулированиями, причем при малом значении относительно коэффициента затухания S;,, колебаний в упругой связи можно воспользоваться прибли женной зависимостью
V . ±Л
л ot :;
рс
которая дает несколько заниженное значение предельной величины коэффициента Крс t а запас по величине этого коэффициента будет тем самым больше, чем больше относительный коэффициент затухания 1, и чем больше инерционность контура регулирования тока. Из выражения (17) можно определить требуемое значение коэффициента К (т.е. коэффициента усилия регулятора 4 скорости по выходному сигналу сумматора 8) для обеспечения требуемого характера переходного процесса при некоторых соотношениях параметров электропривода значение этого коэффициента может быть близким к нулю, что эквивалентно связи между выходом сумматора 8 и входом регулятора 4 скорости.
к, .r i(rl)(20)
14362546
скорости для абсолютно жесткой системы, наличие упругости приводит к (18) отставанию скорости только на 1,3 То при обеспечении эффективного демпфирования колебаний.
Предлагаемое устройство позволяет упростить.электропривод за счет того, что узел параллельной коррекции вы10 полнен на двух элементах и уменьшено количество связей между элементами. Упрощается также наладка электропривода за счет уменьшения количества настраиваемых параметров узла парал с лельной коррекции до одного (постоянная времени интегратора).
Одновременно повышается эффективность гашения колебан:яй в условиях (19) нестабильности собственной частоты
20 колебаний (например, при изменении высоты подвеса груза кранов и экскаватора, изменения длины каната подъемника и лифта и т.п.), поскольку демпфирующий сигнал на выходе узла па25 раллельной коррекции формируется в функции скорости тока электродвигателя в соответствии с реальным значением этой частоты .
30
Формула изобретения
35
40
AClAir М
-Av- j Kpt; j.
При указанном выборе коэффициентов Крс и 4 обеспечиваются плавное уменьшение момента в упругой связи и плавный переход скорости электродвигателя и механизма к установившемуся значению (4даг. 2), где графики построены для следующих значений параметров электроприводов: - 0,05; 1 1.2; Т„/Ту 10; Крс « 0,3 Тм/Т,,.
Как следует из сравнения графиков 11 и 12 изменения скорости электродвигателя 2 и механизма в предложенной системе с графиком 13 изменения
Электропривод с упругой механической связью, содержащий электродвигатель постоянного тока, подключенный к управляющему преобразователю, в цепь управления которого включены соединенные последовательно регуляторы скорости и тока, подключенные к входам соответствующих регуляторов датчики скорости и тока, а также сумматор, соединенный одним своим входом с выходом датчика скорости, а выходом - с вторым входом регулятора тока, отличающий- с я тем, что, с целью упрощения схемы и наладки электропривода и повьш1ения эффективности гашения колебаний в упругой связи при нестабильности собственной частоты этих колебаний, в него введен интегратор, своим
входом подключенный к выходу датчика тока, а выходом - к второму входу сумматора, выход которого соединен также с входом регулятора скорости, при этом постоянная времени -иитегратора Т
55 выбирается равной
45
т и
( Ia) KM- К
А. с
30
Формула изобретения
Электропривод с упругой механической связью, содержащий электродвигатель постоянного тока, подключенный к управляющему преобразователю, в цепь управления которого включены соединенные последовательно регуляторы скорости и тока, подключенные к входам соответствующих регуляторов датчики скорости и тока, а также сумматор, соединенный одним своим входом с выходом датчика скорости, а выходом - с вторым входом регулятора тока, отличающий- с я тем, что, с целью упрощения схемы и наладки электропривода и повьш1ения эффективности гашения колебаний в упругой связи при нестабильности собственной частоты этих колебаний, в него введен интегратор, своим
входом подключенный к выходу датчика тока, а выходом - к второму входу сумматора, выход которого соединен также с входом регулятора скорости, при этом постоянная времени -иитегратора Т
выбирается равной
( Ia) KM- К
А. с
, К.г передаточныа коэф- фициенты датчиков скорости и тока; д м моменты инерции
электродвигателя и
Hyk д.м
механизма;
- коэффициент пропорциональности медду током и моментом электродвигателя
8
12 iSИ
9иг.2
24
| Борцой Ю.А | |||
| и Соколовский Г.Г | |||
| Тиристориые системы электропривода с упругими связями | |||
| - Л.: Энергия, 1979, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
