Изобретение относится к станко- строению и касается приводного механизма для механической руки промьш - ленного робота, которая имеет флан- 5 цевое тело, связанное с рукой посредством промежуточного узла (запястья).
Цель изобретения - быстрый съем или ремонт промежуточного узла (запястья) и снижение габаритов привод- 10 кого механизма.
На фиг. 1 приведено общее изображение промьшшенного робота; на фиг, 2 - сечение А-А на фи.г. 1.
Промышленный робот имеет механи- 15 ческую руку 1, которая делится на промежуточный узел 2 (запястье,или тело вращения), поворотный элемент 3 и г}шанцеЕое тело ч. Промежуточный узел 2, поворотный элемент 3 и флан 20 цевое тело 4 могут вращаться или поворачиваться в соответствии с гюказан- ньми па фиг. 1 стрелками. На фланцевом теле 4 могут быть установлены различпы, необходимые для специаль- 25 ной цепи использования инструменты,, например сварочные клещи, краскопуль- ты для пронз)зодства работ , связанных с нанесением лакового покрытия, элементы зах1зата и им подобные. зо
Компоновка приводного механизма состоит прежде всего из двух проводных валов 5 и 6 (фиг.2)5 которые введены в запястье механической руки промьшленпого робота и Tai-i развет- вляются на две кинематические цепи. Разветвление кинематических цепей в запястье выполнено с помощью промежуточных валов 7 и 8, которые расположены пapaлJ:eльнo осям приводных ва-др лов 5 и 6. Приводной вал 6 через верхние (на ) промежуточные ва- siM 7 и 8, а также через расположенный поперек вала 8 и, следовательно, поперек приводного вала 6 дополнитель- ный промежуточный вал 9 и через вал Ю приводит зо вращение фланцевое тело 4. Приводной вал 5 через нижние (на фиг.2) промежуточные валы 7 и 8, а также через проходящи.й поперек ва- ла 8 и, следовательно, поперек приводного вала 5 вал 11 приводит к повороту элемента 3 вокруг оси, параллельной оси вала 11, являющегося также дополнительным промежуточным валом. При этом ось вращения фланцевого тела 4 совпадает с осью вала Ю, а ось вращения элемента 3-е осями валов 9 и 11. Между приводнь1м валом
3 и промежуточным валом 10 в кинематическую цепь вращения фланцевого тела 4 включена понижающая передача 12, а между приводным валом 6 и валом 11 для качания - передача 13. Эти понижающие передачи 12 или 13 необязательно должны быть включены мелсду последними звеньями соответствующих кинематических цепей, однако такое включение предпочтительно.
Промежуточные валы 7 состоят из неподвижной цапфы 14 и установленного на ней с возможностью вращения цилиндрического зубчатого колеса 15. Это обеспечивает простой монтаж промежуточных валов 7 в промежуточном узле 2 и простой ремонт или замену.
Б то время как приводные валы 5 и 6, а также промежуточные валы 7 имеют исключительно цилиндрическое зубчатое зацепление, валы 8 выполнены с одной стороны,с цилиндрическим зубчатым зацеплением колес 15, ас другой стороны с коническим зубчатым зацеплением колес 16 для того, чтобы входить в зацепление с оснащенными также коническим зубчатым колесом прмежуточного вала 9 или с колесами 17 вала 11. Эти преобладающие относительно простые зубчатые зацепления являются предпочтительными, например с точки зрения простого монтажа, требующего меньших ..затрат изготовления и т.д.
Как и промежуточные валы 7, вал 11 также состоит из неподвижной цапфы и закрепленного на ней конического зубчатого колеса. Вал 11 установлен в промежуточном узле 2 и в поро ротном элементе 3.
о р м у л а
изобретения
1. Приводной механизм для механической руки промышленного робота, имеккцей фланцевое тело, связанное с рукой посредством промежуточного узла (запястья), содержащий первый приводной вал, первую кинематическую цепь для вращения фланцевого тела вокруг продольной оси руки, включающую понижающую передачу, а также второй приводной вал и вторую кинематическую цепь для качания фланцевого тела вокруг оси, перпендикулярной продольной оси руки, включающую также понижающую передачу приче обе кинематические цепи имеют промежуточные валы, а оба приводных вала связаны с индивидуальными средствами перемещения (двигателями), о т- личающийся тем, что, с целью обеспечения быстрого съема или ремонта промежуточного узла (запястья) и снижения габаритов приводного механизма, оба промежуточных вала расположены параллельно соо гветст- вуклцим приводным валам.
2.Механизм поп.1,отлича- ю щ и и с я тем, что промежуточные валы имеют цапфу на одном конце и цилиндрическое зубчатое колесо на другом конце.
3.Механизм по пп.1 и 2, отличающийся тем, что промежуточные валы имеют на одном конце цшшнческое зубчатое колесо, причем цилиндрические зубчатые колеса промежуточных валов образуют передачи.
4. Механизм по пп. 1-3, о т л и- чающийся тем, что в кинематической цепи качания имеется дополнительный промежуточный вал, закрепи ленный цапфой в промежуточном узле
(запястье), а на этом валу имеется коническое зубчатое колесо, образующее с. коническим зубчатым колесом основного промежуточного вала Койиче- скую передачу.
5. Мехайизм по пп. 1-4, отличающийся тем, ; что приводные валы имеют цилинд|рические зубчатые колеса, образующие с цилиндрическими зуЬчатыми колесами промежу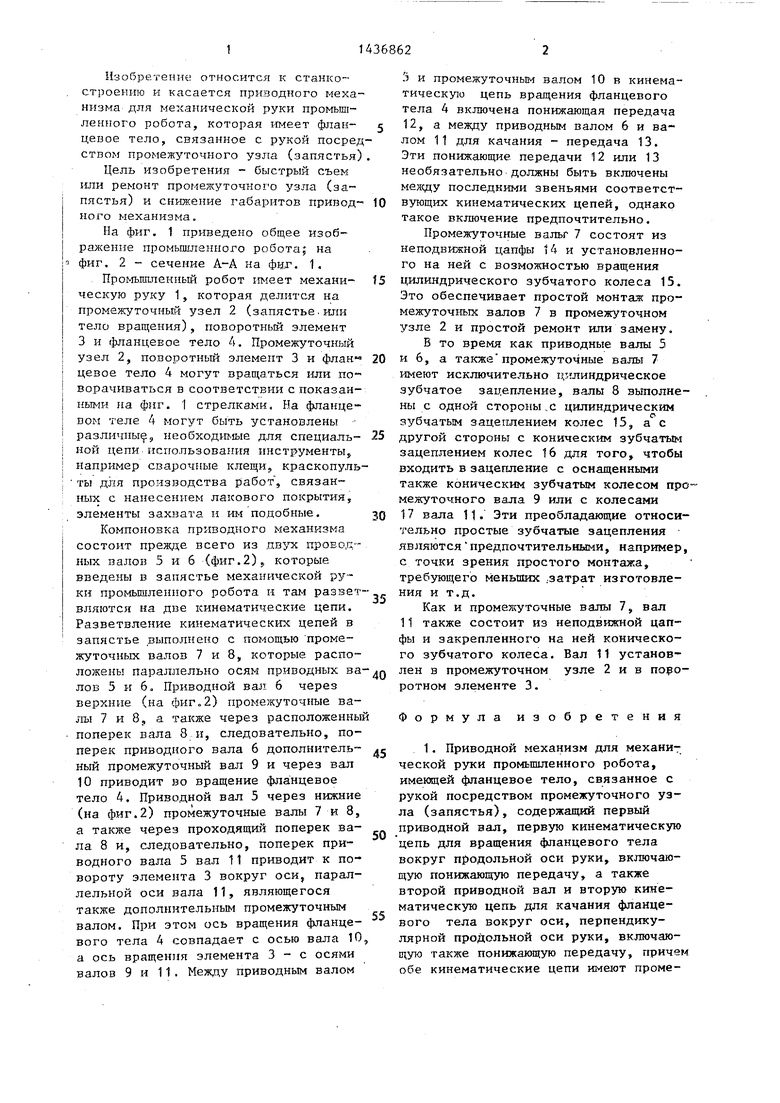
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1414640A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| ЗУБЧАТО - ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2636440C2 |
| КИСТЬ РУКИ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2028932C1 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2558023C9 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| ДВУХСКОРОСТНОЙ МЕХАНИЗМ ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ ПЕРЕДНЕЙ ЧАСТИ ПОЛУПРИЦЕПА (ВАРИАНТЫ) | 1995 |
|
RU2128596C1 |
| Рука робота | 1991 |
|
SU1757877A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА (ВАРИАНТЫ) | 2008 |
|
RU2407861C2 |
| Промышленный робот | 1982 |
|
SU1108005A1 |
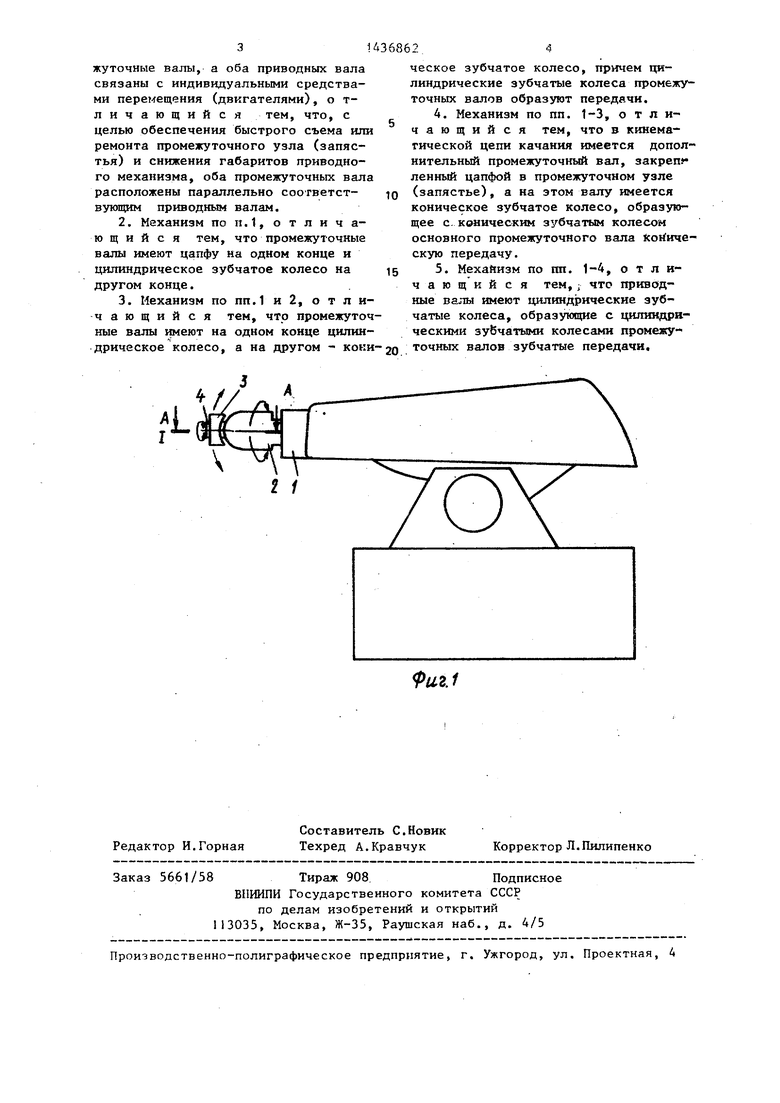
Изобретение относится к области станкостроения и касается приводного механизма для механической руки про- мьшшенного робота, которая имеет фланцевое тело, связанное с рукой посредством промежуточного узла (запястья). Цель изобретения - быстрый съем или и ремонт промежуточного узла (запястья) и снижение габаритов приводного механизма. В кинематической цепи привода поворота и качания фланцевого тела 4 имеются промежуточные валы 7 и 8,параллельные приводным валам 5 и 6. На конце валов 7 выполнены цапфы, а на другом установлены цилиндрические зубчатые колеса 15, зацеплякяциеся с цнпиндрическими зубчатыми колесами, установленными на одних концах валов 8. На других концах зтих валов В установлены зубчатые колеса 16, обра- зуюпще передачи с валами 9 и 11, которые входят соответственно в кинематические цепи вращения и качания фланцевого тела 4. Такое взаимное расположение валов и передач требует .меньше затрат при изготовлении и монтаже. 4 з.п. ф-лы, 2 ил. 16 8 i5 . СО Фаг. 2
дрическое колесо, а на другом - коки-2о точных валов зубчатые передачи.
.1
| Заявка ФРГ 3048067, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
