Доверну/йо 25 7
9д Ji
Изобретение относится к роботот |нике и касается конструкции кистево ; го узла, который может быть использ :ван в антропоморфных промыпшенных |роботах.
I Цель изобретения - расширение I технологических возможностей при од Iновременном упрощении системы управ |ления за счет обеспечения независи- мости движения качания и вращения I кисти.
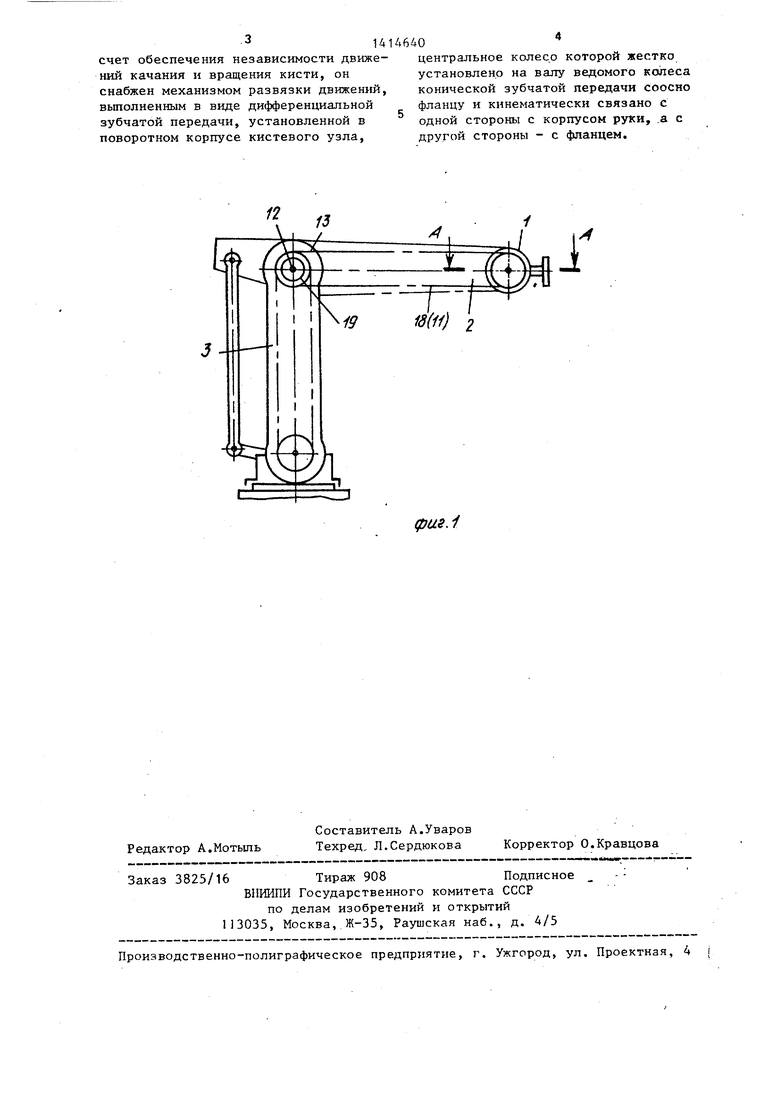
I На фиг. 1 показан манипулятор, I общий вид; на фиг. 2 - разрез А-А I на фиг. 1.
I Кистевой узел 1 манипулятора уст Iновлен на корпусе руки 2, опиракщей Iся на плечо 3 манипулятора (фиг.1) и содержит поворотный корпус 4, шар кирно связанный с корпусом руки 2 по горизонтальной оси качания 1-1 цапфами 5 и 6, фланец 7 с валом 8 и осью вращения П-П, привод 9 вращения фланца 7 и привод 10 качания фланца 7, размещенные в корпусе руки 2, а. также механизм развязки движений вращения и качания фланца 7. Последний установлен на полом валу 8, размещенном в корпусе 4 с осью вращения II-I1, перпендикулярной ос качания I-I.
Привод 9 вращения фланца 7, выпоненный, например, в виде цепной передачи 11, получающей вращение от промежуточного вала 12, размещенног в шарнире 13, соединяющем корпус руки 2 и плечо 3 манипулятора, имеет ведомый вал.14, на котором установлно ведущее колесо 15 конической передачи, кинематически связьюающей приводы с полым валом 8 фланца 7. Ведомое колесо 16 этой передачи закреплено на валу 17, размещенном в полом валу 8.
Привод 10 качания фланца 7 выпол нен в виде цепной передачи 18, полу чаюцей вращение от вала 19, размещеного в том же шарнире 13 соосно с валом 12, а-также имеет ведомьй вал конструктивно совмещенный с цапфой 6 поворотного корпуса 4.
Механизм 20 развязки движений размещен внутри корпуса 4 и состоит из дифференциальной передачи 21, центральное колесо 22 которой закрелено на одном 17 с ведомым колесом 16, водило 23 установлено на полом валу 8 фланца 7, а колесо 24 - на полом валу 25, соосном с
0
5
0
5
0
5
0
0
5
валом 8, и снабжен коническим венцом
26,соединенным с колесом 27, жестко закрепленным на втулке 28 корпуса руки 2. Поворотный корпус 4 цапфой
5 насажен на втулку 28, а цапфой 6 посажен во втулку 29 корпуса руки,2.
Кистевой узел манипулятора работает следующим образом.
Вращение фланца 7 вокруг оси11-11. Привод 10 качания фланца 7 заторможен и поворотньй корпус 4 неподвижен вместе с цапфой 6 относительно корпуса руки 2 и, следовательно, коническое колесо 27, жестко связанное с этим корпусом, вместе с коническим венцом 26 и зубчатым колесом 24 неподвижны относительно корпуса 4.
Работа привода 9 вращения фланца 7 сопровождается вращением вала 14 относительно корпуса 4 и установленного на этом же валу ведущего конического колеса 15. Последнее передает вращение ведомому колесу 16, вместе с валом 17 которого вращается центральное колесо 22 дифференциальной передачи 21. При неподвижном колесе 24 от центрального колеса 22 получают вращение водило 23 и фланец 7.
Качание фланца 7 относительно оси I-I. Привод 9 вращений фланца заторможен и, следовательно, вал 14 с коническим колесом 15. неподвижен. Неподвижно также и коническое колесо 27, защемленное в корпусе 2.
Работа привода 10 сопровождается вращением корпуса 4 относительно корпуса руки 2 (оси I-I). При этом передачи 15-16 и 27-26 работают как планетйрные механизмы с общим води- лом в виде корпуса 4. Таким образом, при вращении корпуса 4 венец 26 обкатывается по неподвижному колесу
27,а колесо 16 - по неподвижному колесу 15.
Формула изобретения
Манипулятор, содержащий основание корпус руки и кистевой узел, имеющий поворотный корпус, шарнирно связан- ньй с корпусом руки, фланец, кинематически связанньй с корпусом руки, механизм вращения и качания фланца, содержащий коническую зубчатую передачу, отличающийся тем, что, с целью расширения технологических возможностей при одновременном упрощении системы управления за
счет обеспечения независимости движений качания и вращения кисти, он снабжен механизмом развязки движений, выполненным в виде дифференциальной зубчатой передачи, установленной в поворотном корпусе кистевого узла.
центральное колесо которой жестко установлено на валу ведомого колеса конической зубчатой передачи соосно фланцу и кинематически связано с одной сторонь: с корпусом руки, .а с другой стороны - с фланцем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| Манипулятор модульного типа | 1977 |
|
SU763082A1 |
| Рука манипулятора | 1983 |
|
SU1151447A1 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Рука манипулятора | 1984 |
|
SU1220781A1 |
Изобретение относится к области роботостроения и касается конструкции кистевого узла, который может быть использован в антропоморфных промьшшенных роботах. Целью изобретения является расширение технологических возможностей при одновременном упрощении системы управления за счет обеспечения независимости движений качания и вращения кисти. При вращении конического колеса 15 осуществляется вращение центрального колеса 22 жестко связанного с колесом 16. При этом планетарное движение водила 23 вызывает вращение фланца 7. При движении приводной цепи 18 осуществляется качание корпуса 4 вместе с фланцем 7. Одновременное включение приводов качания и вращения не вызывает зависимости этих движений. 2 ил. (Л
фазЛ
| Промышленная робототехйика | |||
| / Под ред | |||
| Я.А.Шифрина | |||
| - М.: Машиностроение, 1982, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
