Изобретение относится к машиностроению, в частности для автоматизации загрузки-выгрузки деталей в металлорежущих станках.
Известен промышленный робот, содержащий установленную на колоннах траверсу, смонтированную на ней каретку с механической рукой, выполненной в виде двух шарнирно соединенных звеньев, головки с захватами и механизма компенсации, причем первое из звеньев механической руки смонтировано на каретке, а второе выполнено в виде одноплечего рычага 1.
Недостатком известного устройства является сложность получения прямолинейного вертикального перемеш,ения головки с захватами, необходимого для смены захватов и взятия деталей.
Цель изобретения - расширение технологических возможностей промышленного робота.
Указанная цель достигается тем, что промышленный робот снабжен расположенным на каретке ползуном и приводом качания головки в горизонтальной плоскости, смонтированным на первом звене механической руки, и кинематически связанным с механизмом компенсации, причем рычаг связан с ползуном.
Механизм компенсации выполнен в виде зубчато-реечной передачи, при этом входное зубчатое колесо этой передачи связано с приводом качания головки.
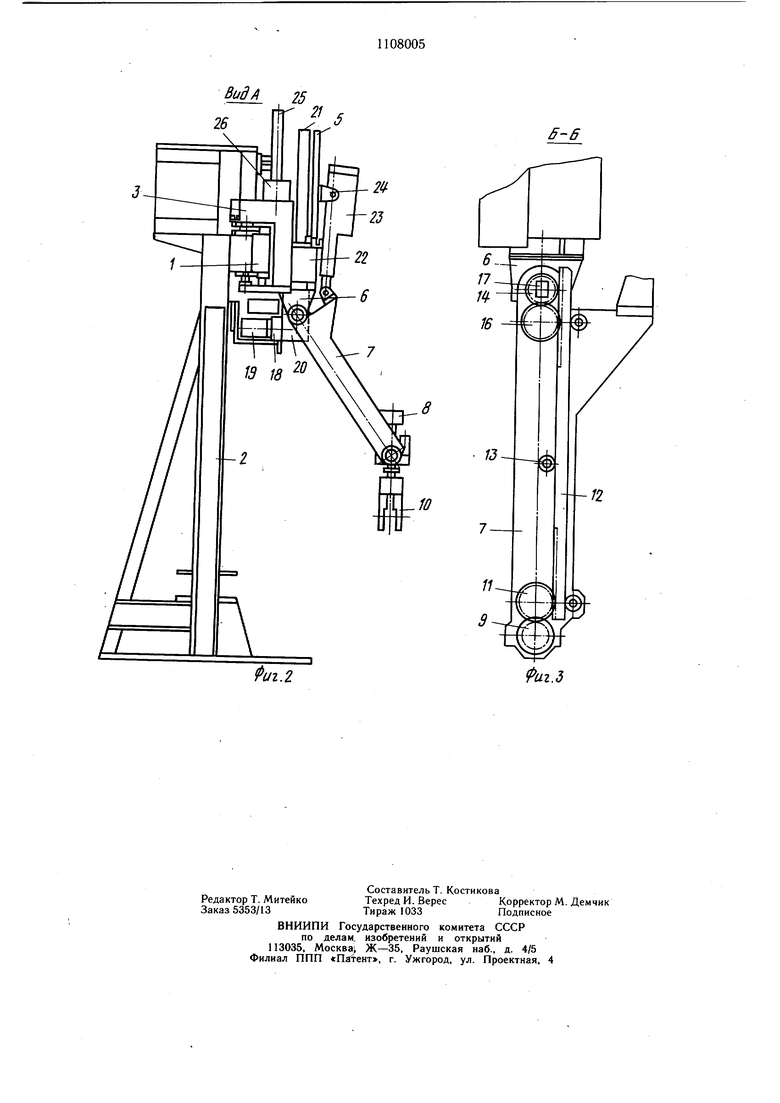
На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Промышленный робот содержит траверсу 1, установленную на колоннах 2, по которой перемещается каретка 3, несущая механическую руку 4. Последняя состоит из ползуна 5, на конце которого крепится кронштейн 6 качающего рычага 7, смонтированного в подшипнике качения на кронштейне 6. Н-а конце рычага 7 в подшипниках качения смонтирована головка 8, в которой установлен захват 9.
Для обеспечения постоянного углового положения в пространстве оси головки 8 по отношению к траверсе 1 и колонне 2 при качании рычага 7 предусмотрен механизм компенсации, выполненный в виде зубчато-реечной передачи, состоящей из зубчатого колеса 10, закрепленного на корпусе головки 8 с захватом 9, которое находится в зацеплении с зубчатым колесом И, установленным на нижней части рычага 7, рейки 12, проходящей внутри рычага 7 и смонтированной на трех направляющих роликах 13, а также из зубчатого колеса 14, установленного на цапфе 15, служащей осью поворота рычага 7 и зубчатого колеса 16, находящегося в зацеплении с колесом. 14 и рейкой 12.
Зубчатое колесо 14 через муфту 17 соединено с выходным валом привода 18 качания головки, смонтированного на кронщтейне 6, на котором также расположены подшипники опор рычага 7.
Привод 18 качания головки состоит из двигателя 19 и редуктора 20, выходной вал которого соединен с зубчатым колесом 14. Для перемещения ползуна 5 служит Линейный электрогидравлический шаговый привод 21, закрепленный на корпусе 22 ползуна 5. Для качания руки служит привод 23, смонтированный на цапфах кронштейна 24, закрепленного на ползуне 5. Для перемещения каретки 3 применен электрогидравлический привод 25 вращения с редуктором 26, передающий вращение на зубчатое колесо, находящееся в зацеплении с рейкой, закрепленной на траверсе 1. Для подвода энергии к приводам на каретке 3 использован кабель-цепь 27.
Промышленный робот работает следующим образом.
При поступлении вызова от станка, либо другого обслуживаемого оборудования, включается привод 25 и каретка 3 перемещается в требуемую зону. Путем включения приводов 21 и 23 осуществляется требуемое перемещение ползуна 5 и качающего рычага 7, благодаря чему головка 3 с захватом 9 перемещается в заданное положение.
При отключении привода 18 качания головки верхняя щестерня 14 остается неподвижной и при Отклонении рычага 7 с помощью привода 23 на любой заданный угол его головки 8 сохраняет свое постоянное угловое положение. Постоянство углового положения головки 8 достигается следующим образом: если рычаг 7 отклонить на любой определенный угол, то шестерня 16, обкатываясь вокруг неподвижной шестерни 14, перемещает рейку 12, которая повернет шестерни 11 и 10 на такой же угол, что и рычаг 7. А так как шестерня 10 жестко связана с осью качания головки 8, то, следовательно, ось головки 8 сохранит свое первоначальное угловое положение к неподвижным координатам.
Этот же механизм компенсации используется для поворота головки 8. При включении привода 18 качания головки, выходной вал которого соединен при помощи муфты 17 с шестерней 14 через механизм компенсации, головка 8 поворачивается вокруг горизонтальной оси на заданный угол.
Промышленный робот предлагаемой конструкции обеспечивает расширение технологических возможностей, обеспечивает получение прямолинейного вертикального перемещения головки с захватами, необходимого для смены захватов и взятия деталей.
Вид А 25
rfr Л
5
Фиг.2
5-6
иг.З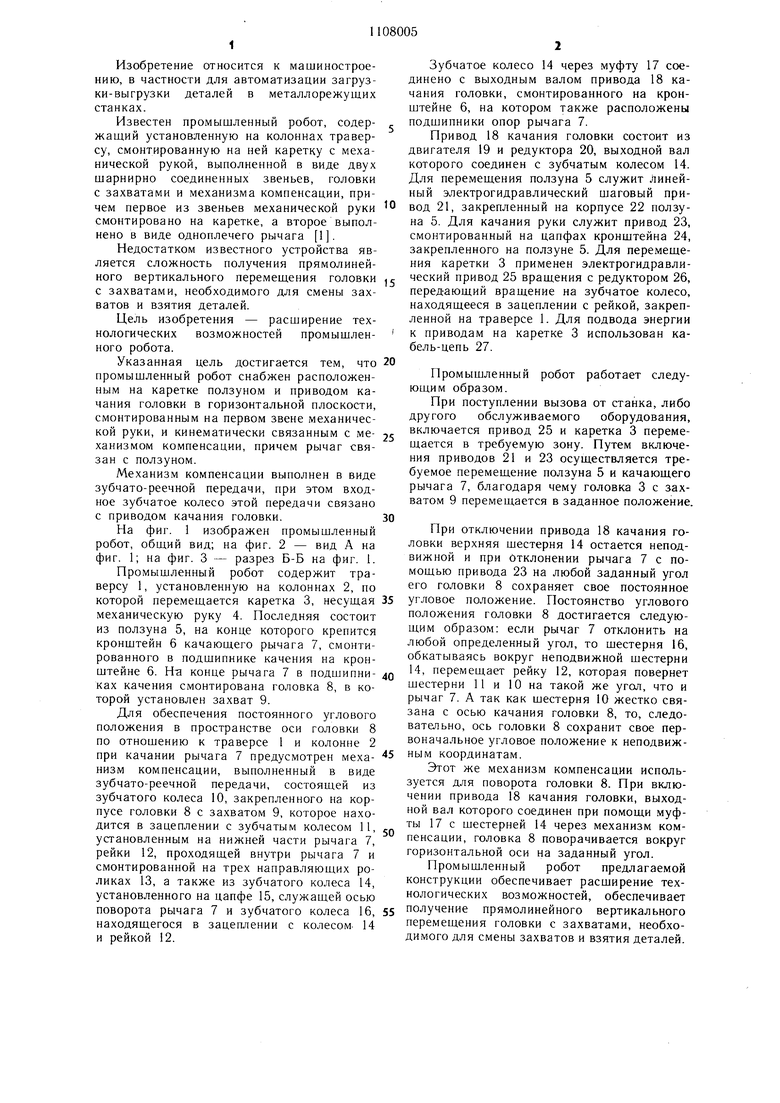
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1321577A1 |
| Устройство для удаления полимерных изделий с арматурой из пресс-форм роторно-конвейерной литьевой машины | 1989 |
|
SU1696313A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Автооператор | 1979 |
|
SU837755A1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506455C1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ВАРИАТОР | 1998 |
|
RU2137966C1 |
| Затяжная машина | 1973 |
|
SU679199A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| ПРИВОД ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 2012 |
|
RU2488023C1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
1. ПРОМБ1ШЛЕННБ1Й РОБОТ, содержащий установленную на колоннах траверсу, смонтированную на ней каретку с механической рукой, выполненной в виде двух шарнирно соединенных звеньев, головки с захватами и механизмами компенсации, причем первое из звеньев механической руки смонтировано на каретке, а второе выполнено в виде одноплечего рычага, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен расположенным на каретке ползуном и приводом качания головки в горизонтальной плоскости, смонтированным на первом звене механической руки и кинематически связанным с механизмом компенсации, причем рычаг связан с ползуном. 2. Робот по п. 1, отличающийся тем,, что механизм компенсации выполнен в виде зубчато-реечной передачи, при этом входное зубчатое колесо этой передачи связано с приводом качания головки.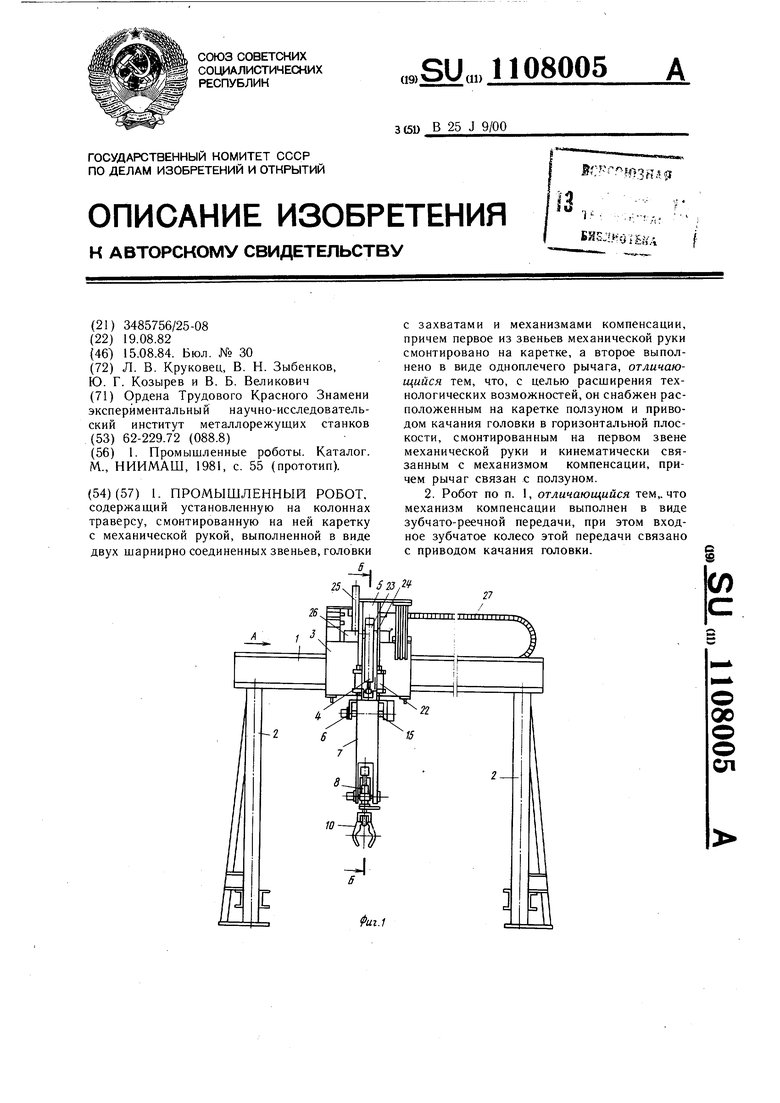
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленные роботы | |||
| Каталог | |||
| М., НИИМАШ, 1981, с | |||
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
