41
СО
4
00
О5
L
14)
JO
Изобретение относится к гидромеханизации, а именно к устройствам автоматизации, землесосных снарядов при добыче полезных ископаемых, в част- кости малосвязанных грунтов типа озерного ила (сапропеля ), и является усовершенствованием известного устрой- ;ства.
: Цель изобретения - повьппение про- 1изводительности землесосного снаря- ;Да.
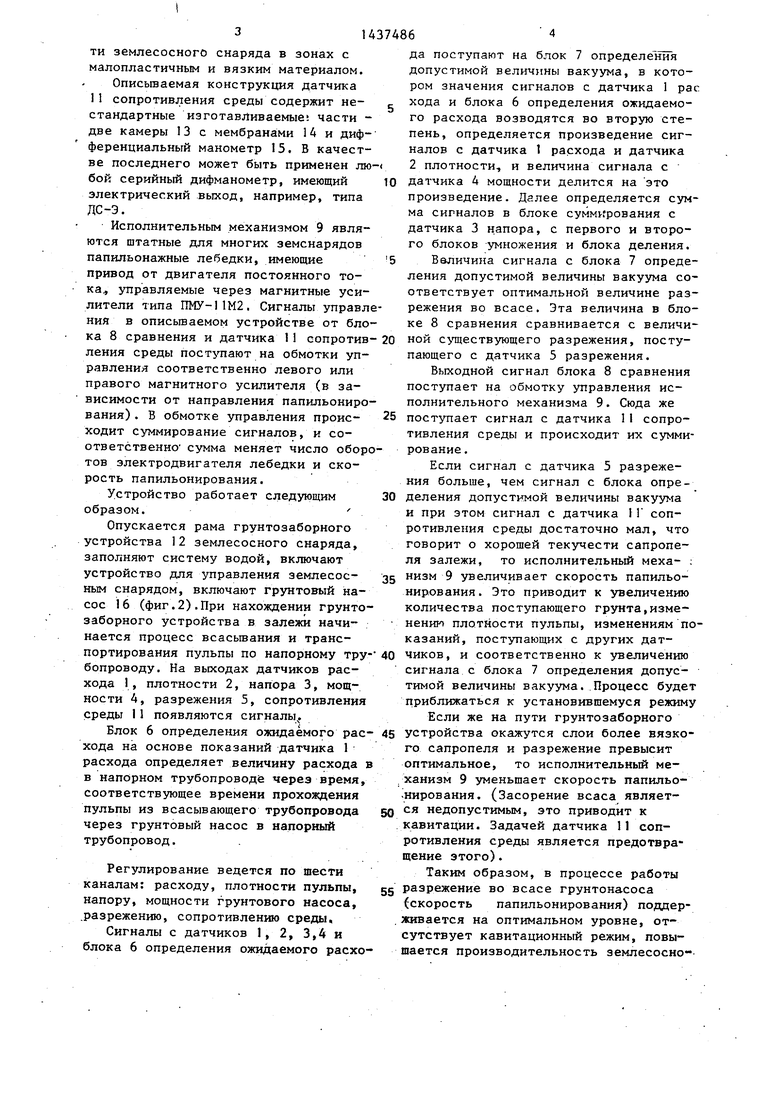
На фиг.1 представлена блок-схема предлагаемого устройства; на фиг,2 -- {землесосный снаряд с расположением устройства для з правления, общий вид, на фиг.З - схематическое расположение и одна из возможных конструкций датчика сопротивления среды. I Устройство для управления земле- jcoCHbiM снарядом содержит датчики рас- |хода 1, плотности пульпы 2, напора ,3, Iустановленные :на напорном трубо- 1проводе, датчик 4 мощности грунтового JHacoca, датчик 5 разрежения, блок 16 определения ожидаемого расхода, блок 7 определения дог1устимой величи- ны вакуума, блок 8 сравнения, ис- :полнительный механизм 9. блок 10 контроля, и датчик 11 сопротивления :среды.
; Датчики расхода 1, плотности пуль- 1пы 2, напора 3, мощности грунтового ;Насоса 4 подключены к блоку 7 опре- деления допустимой величины вакуума, на вход которого подключен также блок 6 определения ожидаемого расхода, свя :занный в свою очередь с датчиком 1 расхода, а выходы блока 7 определения допустимой величины вакуума соединены с входами блока 8-сравнения и блока
10контроля, при этом блок 8 сравнения соединен также с датчиком 5 разрежения, исполнительным механизмом 9 и блоком 10 контроля. На вход исполни- TejIbHoro механизма 9 также подключен датчик 11 сопротивления среды, соединенный с блоком 1 О контроля.
Принцип действия датчика 11 сопротивления среды основан на измерении Сопротивления среды продвижению в ней грунтозаборного органа. Датчик
11сопротивления среды может использовать любой способ передачи и переработки информации - электрический, гидравлический, пневматический, ком-, бинированный и т.п.
Одно из возможных исполнений датчика 11 сопротивления среды представ25
сЮ
15 20 , 30
35 - 40
45Q
55
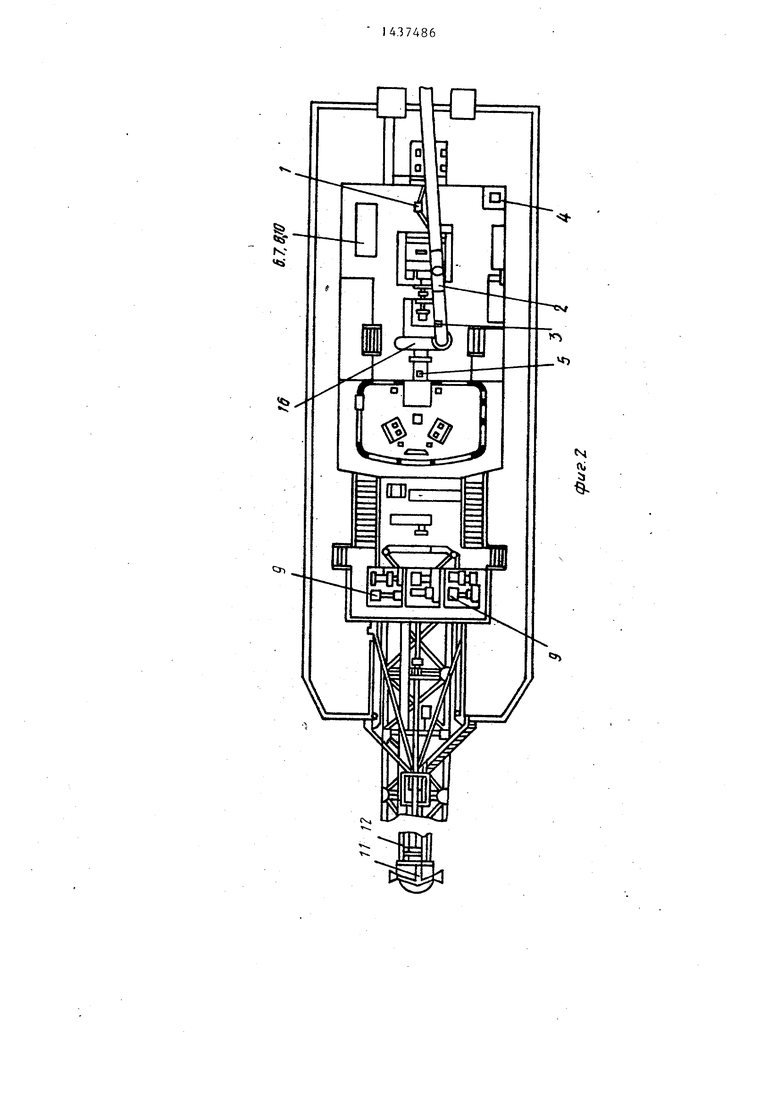
ляет собой два чувствительных элемента, закрепленных на разньк сторонах грунтозаборного устройства 12 в виде камер 13 с гибкими мембранами 14 и прибора сравнения их показаний в виде дифференциального манометра 15. , I Полости камер 13 и манометра 15 соединены и заполнены жидкостью. Показания нанометра 15 пропорциональны величине сопротивления сапропелевой зал€|жи продвижению сквозь нее грунтозаборного устройства.
С выхода дифференциального манометра стандартный электрический сигнал 0-5 мА подается на вход (обмотку управления) испол нительного механизма 9 и на вход блока 10 контро ля. При этом большему сопротивлению среды соответствует меньшая скорость папильонирования и наоборот,
Чувствительность датчика 1 1 сопро: тивления среды обусловлена конструктивным выполнением. При движении грунтозаборного устройства в воде (см. фиг.З)
Pi Pj,(О
где - давление воды на чувствительные элементы. При наличии сапропеля Р 7 Р (либо Р 2 Р при движении в другую сторону). При этом
4Р Р,-. Р,(2)
где ЛР - разница давл ений.
Эта величина определяет степень воздействия сапропеля залежи на чувствительный Элемент. Следовательно, величина /IP (и соответствующий ей электрический эквивалент на- выхо - де с дифференциального манометра) однозначно определяет механические и геологические свойства сапропелевой залежи. Эта величина является интегральной оценкой (с позиций воз-- можности грунтозабора) таких свойств залежи .как консистенция, вязкость, влажность, температура, степень предварительной переработки материала и т.п.
Таким образом, датчик 11 сопротивления среды дает информацию, обеспечивающую соотношение технологических режимов грунтозабора со свойствами залежи и, следовательно, обеспечивает повышение производительноети землесосного снаряда в зонах с малопластичным и вязким материалом. Описьшаемая конструкция датчика 11 сопротивления среды содержит нестандартные изготавливаемые; части - две камеры 13 с мембранами 14 и дифференциальный манометр 15. В качестве последнего может быть применен лю-
бой серийный дифманометр, имеющий электрический выход, например, типа
дс-э.
Исполнительным механизмом 9 являются штатные для многих земснарядов папильонажные лебедки, имеющие привод от двигателя постоянного то- ка управляемые через магнитные усилители типа 1ШУ-11М2. Сигналы управлния в описьшаемом устройстве от блока 8 сравнения и датчика 11 сопротив ления среды поступают на обмотки управления соответственно левого или правого магнитного усилителя (в зависимости от направления папильониро вания). В обмотке управления проис- ходит суммирование сигналов, и соответственно сумма меняет число обортов электродвигателя лебедки и скорость папильонирования.
Устройство работает следующим образом.
Опускается рама грунтозаборного устройства 12 землесосного снаряда, заполняют систему водой, включают устройство для управления землесосным снарядом, включают грунтовый насос 16 (фиг.2).При нахождении грунтозаборного устройства в залежи начинается процесс всасывания и транс
ТО
52025 37486
да поступают на блок 7 определеТшя допустимой величины вакуума, в котором значения сигналов с датчика 1 рас хода и блока 6 определения ожидаемого расхода возводятся во вторую степень, определяется произведение сигналов с датчика 1 расхода и датчика 2 плотности, и величина сигнала с датчика 4 мощности делится на это произведение. Далее определяется сумма сигналов в блоке cyмм fpoвaния с датчика 3 напора, с первого и второго блоков умножения и блока деления.
Величина сигнала с блока 7 определения допустимой величины вакуума соответствует оптимальной величине разрежения во всасе. Эта величина в блоке 8 сравнения сравнивается с величиной существующего разрежения, поступающего с датчика 5 разрежения.
Выходной сигнал блока 8 сравнения поступает на обмотку управления исполнительного механизма 9. Сюда же поступает сигнал с датчика 1I сопротивления среды и происходит их суммирование .
Если сигнал с датчика 5 разрежения больше, чем сигнал с блока определения допустимой величины вакуума и при этом сигнал с датчика 1 Г сопротивления среды достаточно мал, что говорит о хорошей текучести сапропеля залежи, то исполнительный меха- ; низм 9 увеличивает скорость папильонирования. Это приводит к увеличению количества поступающего грунта,изменению плотности пульпы, изменениям показаний, поступающих с других дат30
35

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления землесосным снарядом | 1984 |
|
SU1258959A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1717742A1 |
| Устройство для управления землесосным снарядом | 1989 |
|
SU1677196A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВОДОЕМОВ ОТ ИЛИСТЫХ ОТЛОЖЕНИЙ И ДОБЫЧИ САПРОПЕЛЯ (ВАРИАНТЫ) | 2007 |
|
RU2348762C1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| Грунтозаборное устройство землесосного снаряда | 1990 |
|
SU1756469A1 |
| Грунтозаборное устройство землесосного снаряда | 1989 |
|
SU1744205A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ПОТОКА ГИДРОСМЕСИ ВО ВСАСЫВАЮЩЕМ ТРУБОПРОВОДЕ ЗЕМСНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2039163C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ УСТРОЙСТВАМИ РАБОЧИХ ПЕРЕМЕЩЕНИЙ ЗЕМЛЕСОСНОГО СНАРЯДА | 2002 |
|
RU2237782C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЗЕМСНАРЯДА | 2010 |
|
RU2426838C1 |
Изобретение касается автоматизации землесосных снарядов. Цель изобретения - повышение произ-ти землесосного снаряда. Устройство снабже но датчиком (Д) 1 расхода, Д 2 плотности пульпы, Д 3 напора, Д 4 мощности грунтового насоса, Д 5 разрежения, Д 11 сопротивления среды. Блок 6 определения ожидаемого расхода формирует сигнал, характеризующий величину расхода в напорной трубе. Блок 7 определяет допустимую величину вакуума, со ответствующую оптимальному значению . разрежения на всасе. Полученная величина сравнивается в блоке 8 сравнения с величиной существующего разрежения, поступающей с Д 5.Выходной сигнал блока 8 управляет исполнительным механизмом 9, задающим скорость папильони- рования с учетом величины сигнала Д 11. Работу устройства контролирует блок 10 контроля, осуществляющий в аварийном режиме отключение исполнительного механизма 9 и включение сигнализации. 1 з.п. ф-лы, 3 ил. s (Л
портирования пульпы по напорному тру 40 чиков, и соответственно к увеличению
бопроводу. На выходах датчиков расхода 1, плотности 2, напора 3, мощности 4, разрежения 5, сопротивления среды 1 1 появляются сигналы.
Блок 6 определения ожидаемого рас- 45 устройства окажутся слои более вязкохода на основе показаний датчика 1 расхода определяет величину расхода в в напорном трубопроводе через время, соответствующее времени прохождения пульпы из всасывающего трубопровода через грунтовый насос в напорный трубопровод.
Регулирование ведется по шести каналам: расходу, плотности пульпы, напору, мощности грунтового насоса, .разрежению, сопротивлению среды.
Сигналы с датчиков 1, 2, 3,4 и блока 6 определения ожидаемого расхосигнала с блока 7 определения допустимой величины вакуума. Процесс будет приближаться к установившемуся режиму Если же на пути грунтозаборного
го сапропеля и разрежение превысит оптимальное, то исполнительный механизм 9 уменьшает скорость папильо- нирования. (Засорение всаса являет50 ся недопустимым, это приводит к кавитации. Задачей датчика 11 сопротивления среды является предотвращение этого).
Таким образом, в процессе работы
55 разрежение во всасе грунтонасоса
(скорость папильонирования) поддер- , живается на оптимальном уровне, отсутствует кавитационный режим, повышается производительность землесосного снаряда, срок службы грунтового насоса и проточной части конструкции и обеспечиваются все преимущества предлагаемого устройства.
Работу устройства контролирует блок 10 контроля. Если в процессе работы выйдет из строя один из управ- х|яю1цих блоков или датчиков или сразу } ескол1 ко, то это приведет к тому, Цто сигнал на выходе блока 8 сравне- Йия. будет иметь значение, отличное с|т возможных значений, характерный исправной работы устройства. В этом случае блок 10 контроля отключает исполнительный механизм 9 и приводит в действие сигнализацию. I Необходимость учета параметров, йонтролируемььс в описываемом устройстве (расход, плотность пульпы, на- ii:op, мощности грунтового насоса, раз ;|ежения и свойств среды), показана математическими зависимостями, приве- ;:;енными в описании к основному изобретению, при зтом процесс грунтозабора е|пределяется напряжением сдвига сапро 1|елевой залежи. При движении в залежи 1 ембр$на датчика деформируется с си- Лой, равной
F А,
(3)
сопротивление продвижению мембраны в среде;
площадь мембраны в плоскости, 5 перпендикулярной направлению набегающего потока; касательное напряжение сдви- .га, определяемое для гидросмесей уравнением Бенгама 40
и V
1в 5Г
+ S.
(4)
где ч - козффициеит структурной вязкости;
dV
rr- - градиент скоррсти сдвига;
at
Ср - статическое начальное напряжение сдвига.
Козффициент структурной вязкости является функцией ряда физических параметров, в том числе температуры.А начальное напряжение сдвига определяется как
о 15г 2 в .с, 1,5 г . 5j
ilo - Ю СШО-А)
5 0 5
0
5 0
В
где А - зольность сапропеля;
GO - содержание органических веществ в сапропеле.
Из вышесказанного следует, что показания датчика сопротивления среды определяют возможности грунтозабора, его оптимальную интенсивность.
6 целом непрерывное регулирование идет по 6 параметрам: мощности грунтового насоса N(t), напора в напорном трубопроводе M(t), плотности пульпы, расхода пульпы Q(t), разрежению во всасе V(t) и сопротивлению среды (напряжению сдвига сапропелевой залежи) .
Преимуществом данного устройства является обеспечение работы землесосного снаряда с учетом параметров среды, что оптимизирует процесс грунтозабора и транспортирования материала. Необходимость такого обеспечения видна в том, что состояние рабочего тела (сапропелевой залежи) характеризуется набором как стабильных, так и переменных во времени и в пространстве параметров и поэтому адаптация режимов работы землесосного снаряда к ним является обязательной.
За счет улучшения качества регулирования, устранения кавитационных режимов, точного поддержания оптимальных параметров процесса, повьппе- ния долговечнос.ти работы насоса и проточной части конструкции удается повысить производительность землесосного снаряла.
Формула 13обре тения
в него введен датчик сопротивления среды, первый выход которого подключен к входу исполнительного механизма, а второй - к входу блока контроля.
,3L
j ffny/r/ref/ue саг /уо/гелл
ff ffCnO/7fftfff7P b O/ y
- fejfatfu3My
ft eflt/f mOHCfcact/
фие.Ъ
| Устройство для управления землесосным снарядом | 1984 |
|
SU1258959A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
