Изобретение относится к гидромеханизации, а именно к устройствам для автоматизации землесосных снарядов, используемых в транспортном и гидротехническом строительстве.
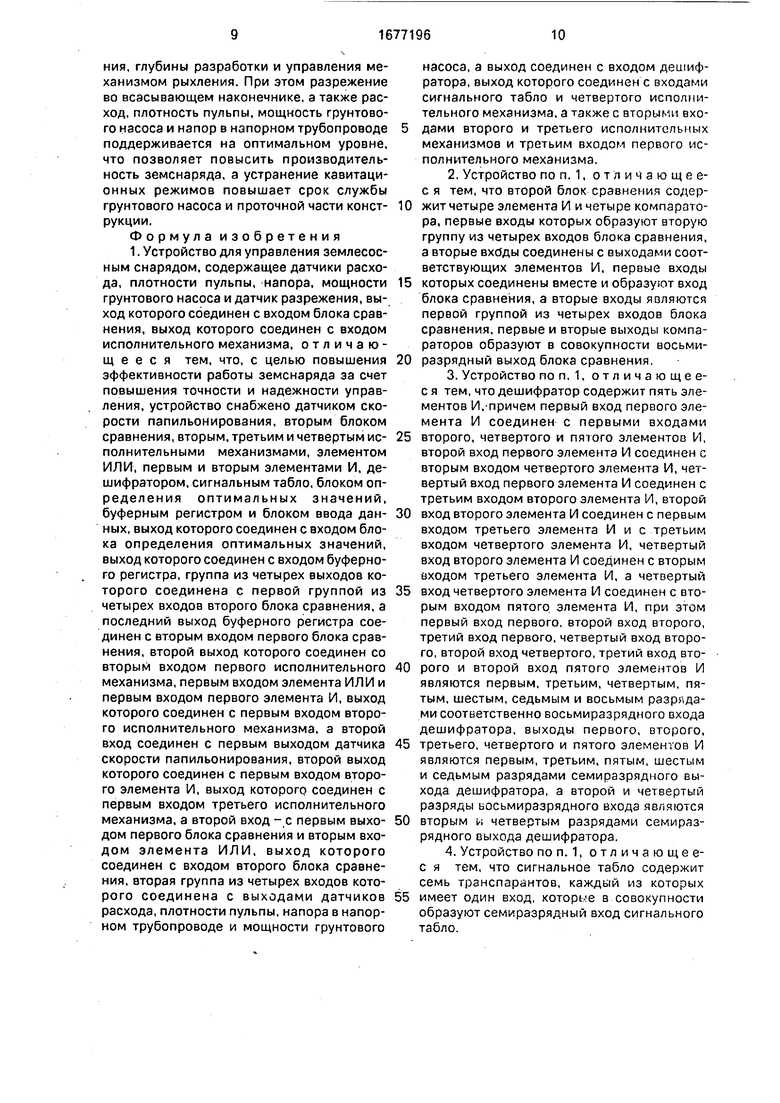
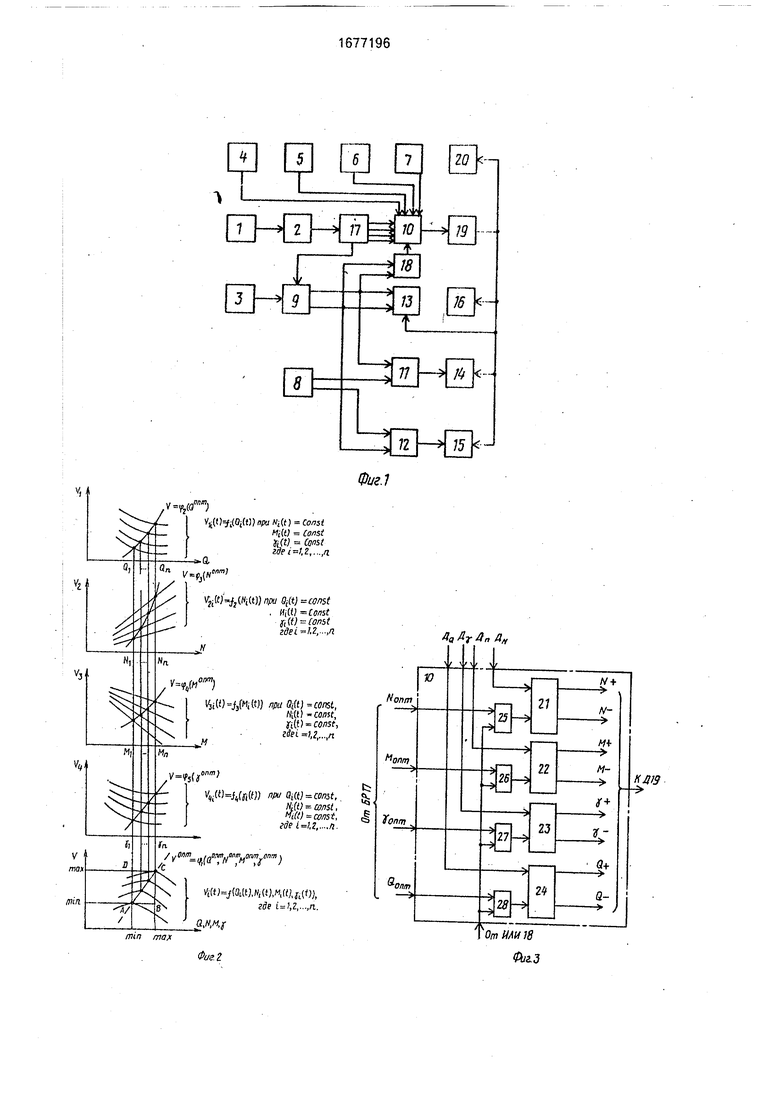
Цель изобретения - повышение эффективности работы земснаряда за счет повышения точности и надежности управления. На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - семейства кривых, показывающие зависимость разрежения во всасывающем наконечнике расхода мощности напора, в напорном трубопроводе, плотности пульпы; на фиг. 3
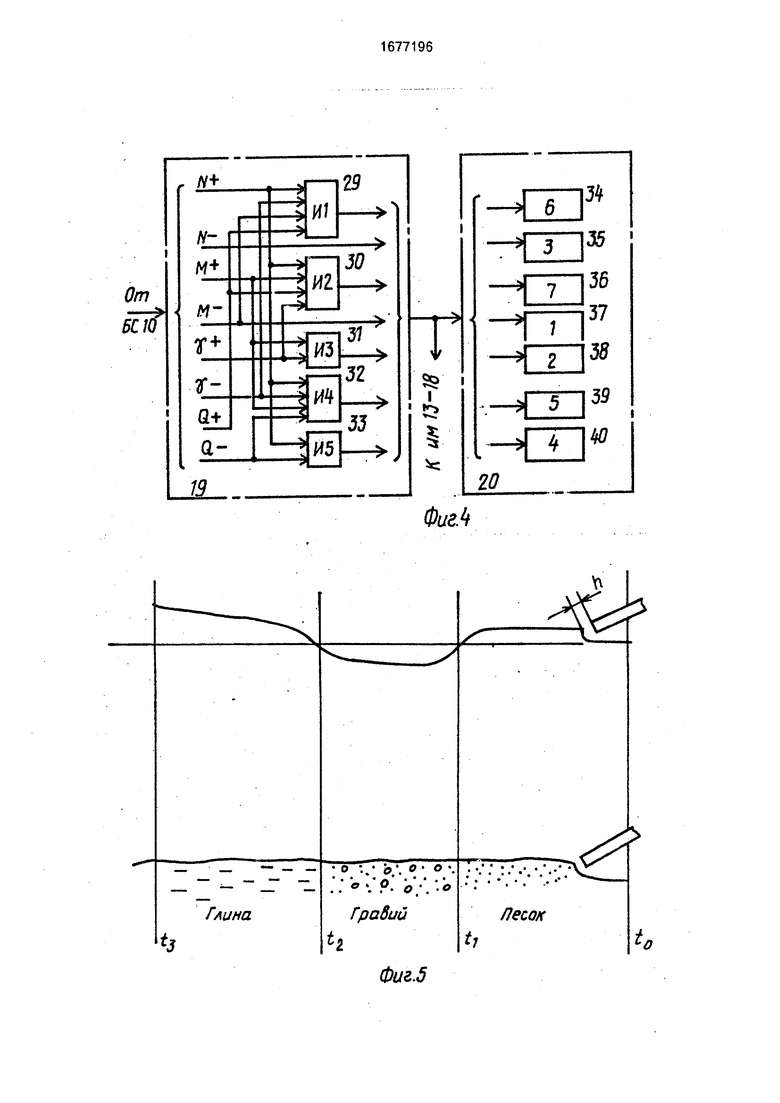
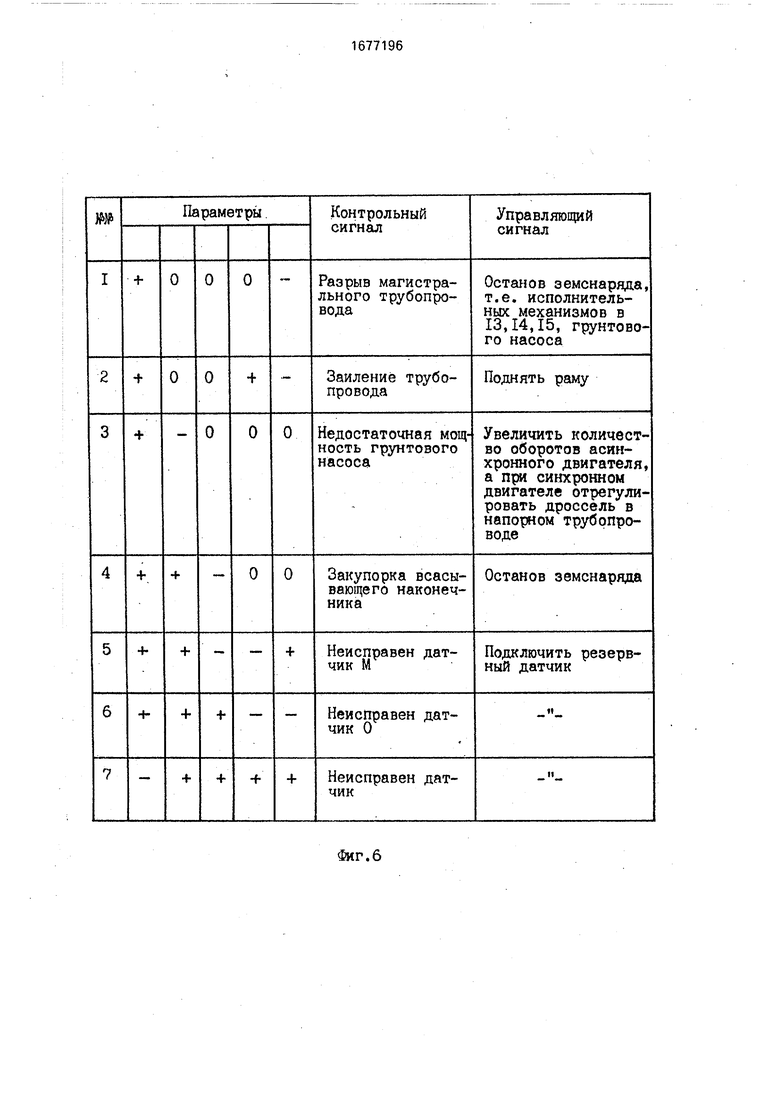
-функциональная схема блока сравнения 10; на фиг. 4 - функциональные схемы дешифратора 19 и сигнального табло 20; на фиг. 5 - схема разрабатываемого забоя; на ф чг. 6 - таблица контрольных сигналов ; на фиг. 7 - блок-схема алгоритма вычислений.
Устойство содержит блок 1 ввода данных, блок 2 определения оптимальных значений, датчики разрежения 3, расхода 4 плотности пульпы 5, напора 6, мощности 7 грунтового насоса, скорости 8 папильони- рования, блоки сравнения 9 и 10, элементы И 11 и 12, исполнительные механизмы 13.
14,15 и 16, буферный регистр 17, элемент ИЛИ 18, дешифратор 19, сигнальное табло 20. Датчики расхода 4, плотности 5, напора 6 и мощности 7 грунтового насоса подключены к второй группе входов блока сравнения 10, первая группа входов которого соединена с группой выходов буферного регистра 17, вход которого соединен с выходом блока 2 определения оптимальных значений, к которому подключен блок 1 ввода данных. Выход буферного регистра соединен с первым входом блока сравнения 9, к второму входу которого подключен датчик 3 разрежения. Первый выход блока 9 соединен с первыми входами элемента ИЛИ 18, исполнительного механизма 13 и элемента И 11, выход которого соединен с первым входом исполнительного механизма 14, а второй вход - с первым входом датчика 8 скорости папильонирования, второй выход которого соединен с первым входом элемента И 12, выход которого соединен с первым входом исполнительного механизма
15,а второй вход - с вторыми выходами блока 9, исполнительного механизма 13 и элемента ИЛИ 18, выход которого соединен с входом блока сравнения 10, выход которого соединен с входом дешифратора 19, выход которого соединен с входом сигнального табло 20, входом исполнительных механизмов 16, вторыми входами исполнительных механизмов 14 и 15, а также
с третьим входом исполнительного механизма 13.
Блок сравнения 10 содержит компараторы 21, 22, 23 и 24 и элементы И 25, 26, 27
и 28. Первые входы каждого компаратора являются второй группой из четырех входов блока сравнения, к которым подключаются датчики расхода, плотности, напора и потребляемой мощности. Вторые входы каждого компаратора соединены с выходами соответствующих элементов И, первые входы которых соединены вместе и образуют управляющий вход блока сравнения. Вторые входы элементов И являются первой
группой из четырех входов блока сравнения 10 и соединяются с группой из четырех выходов буферного регистра 17. Этот регистр состоит из пяти секций, в которые записываются результаты вычислений соответственно Norn, Мопт, УОТП, Оопт И Voni,
поступающие из блока 2 определения оптимальных значений, Выходы первых четырех секций образуют группу из четырех выходов буферного регистра, а выход пятой секции соединяется с входом блока сравнения 9.
Первые выходы компараторов 21, 22,23 и 24 являются выходами положительного результата сравнения поступающих на вход чисел, т.е. N+, М+, у+иО+, а вторые выходы компараторов являются выходами отрицательного результата сравнения, т.е. N-, М-, у-, Q-. Все восемь указанных выходов компараторов объединены в восьмиразрядный выход блока сравнения 10.
Дешифратор 19 содержит элементы И
29,30,31,32 и 33. Вход дешифратора содержит восемь разрядов: N+, N-, М+, М-, у+.у-, Q+, Q-, являющихся входами указанных элементов И. Вход N+ соединен с первыми входами элементов И 29, 30. 32 и 33, вход Nявляется вторым разрядом выхода дешифратора, вход М+ соединен с вторым входом элемента И 30, первым входом элемента И 31 и третьим уходом элемента И 32, вход М- соединен с третьим входом элемента И 29 и
является четвертым разрядом выхода дешифратора, вход у+ соединен с четвертым входом элемента И 30 и вторым входом элемента И 31, вход у- соединен со вторыми входами элементов И 29 и И 32, вход Q+
соединен с четвертым входом элемента И 29 и третьим входом элемента И 30. вход Q- соединен с четвертым входом элемента И 32 и вторым входом элемента И 33. Выходы элементов И 29, 30, 31, 32 и 33 являются
первым, третьим, пятым, шестым и седьмым разрядами семиразрядного выхода дешифратора.
Сигнальное табло 20 содержит семь световых транспарантов 34, 35, 36, 37, 38, 39 и 40, входы которых образуют семиразрядный вход сигнального табло. Каждый разряд входа табло соединен с одноименным разрядом выхода дешифратора. Номера транспарантов соответствуют номерам контрольных сигналов на фиг. 6.
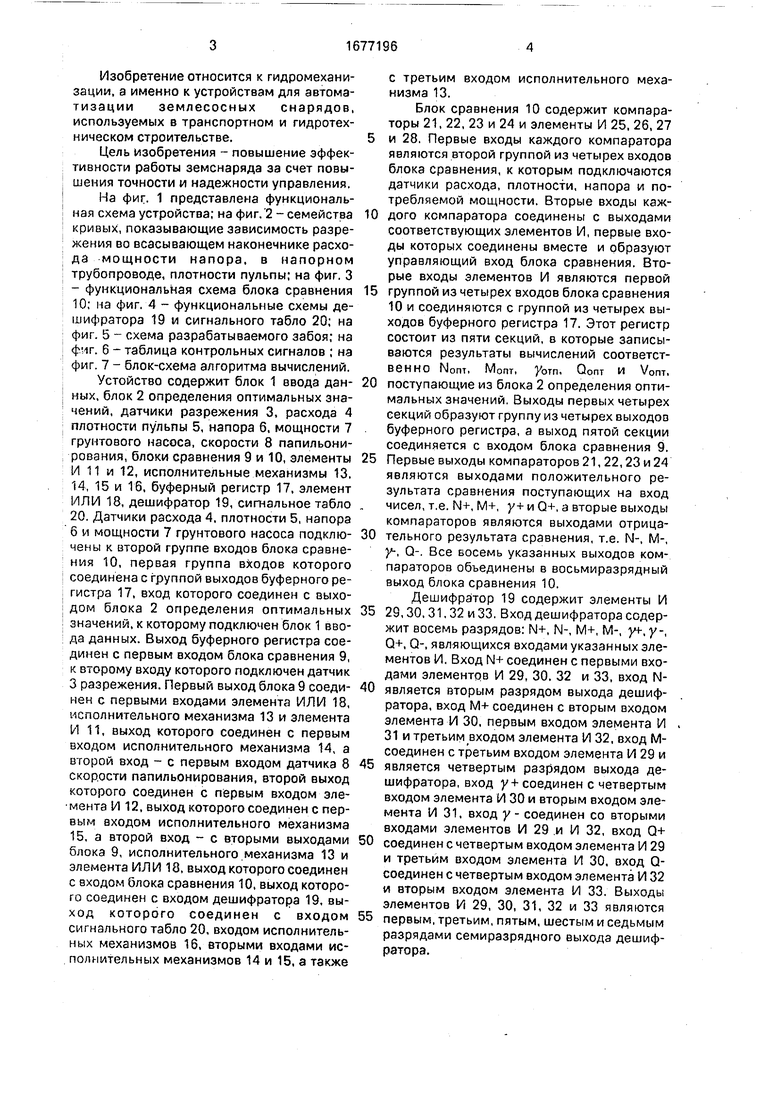
На фиг. 2 а, б, в, г соответственно представлены семейства кривых, показывающие зависимость разрежения во всасывающем наконечнике от расхода V(t)f i(Q(t)j, мощности, потребляемой грунтовым насосом V(t)f2(N(t)), напора V(t)f3(M(t)) в напорном трубопроводе и плотности пульпы V(t)f4(y (t)) от конкретных условий:
Qi(t), Ni(t), Mi(t),yi(t)
Qz(t), №(t), M2(t),y2(t)(1)
Qn(t), Nn(t), Mn(t), yn(t)
Эти условия зависят от конструктивных особенностей грунтозаборных устройств, типов разрабатываемых грунтов, глубины забоя, высоты намываемого сооружения и
ДР.
На фиг. 2 д представлено семейство результирующих кривых параметров регулирования, построенных по формуле
vft4 N(tV102 Mfft 2gQB(t) VW Q,(t)-y(t) MW .52 f
(2)
где N(t) - мощность, потребляемая грунтовым насосом:
Q(t)- расход в напорном трубопроводе:
у (t) - плотность пульпы;
M(t) - напор в напорном трубопроводе,
)/- КПД гидросистемы насос-трубопровод/
SH, SB площадь поперечного сечения напорного и всасывающего трубопроводов. Расчетное значение V(t) затем сравнивается с измеренным разрежением /Изм(т.).
Рабочий режим гидротранспортной системы должен ограничиваться площадью фигуры ABCD, где координата А соответст- вует допустимым значениям Qmin min{Qi(t)}, Nmin min{Nj(t)}, Mmin min{Mi(t)} и у i (t)} при 0 t я-, а координата В соответствует допустимым значениям Qmax max{Qj(t)}, Nmax max{Nj(t)}, Mmax max{Mi(t)} и у max max{ у i(t) при 0 t
Прямые AD и ВС характеризуют изменения разрезания V(t) при изменении конкретных условий работы земснаряда и поддержании параметров регулирования на уровне минимальных и максимальных
значений соответственно. Кривая АС характеризует оптимальный режим работы системы, для которого
V0nr (QonT, Nonr, Мопт, У опт),(3)
Устройство работает следующим образом,
Перед началом технологического процесса определяются исходные данные (1) и с помощью блока ввода данных 1 записываются в блок опредлеения оптимальных значений 2. Блок 2 обрабатывает полученные данные по заданной программе и определяет оптимальные параметры У0пт, М0пт, Оопт. Мопт и у опт, которые поступают в буферный регистр 17. Затем опускается рама грунтозаборного устройства земснаряда, система заполняется водой, включается устройство для управления земснарядом и грунтовой насос. Начинается процесс всасывания и транспортирования пульпы по напорному
трубопроводу. На выходах датчиков разрежения 3, расхода 4, плотности 5, напора 6, мощности-7 и скорости 8 папильонирования . появляются сигналы. Сигнал с выхода датчика 3 разрежения /Изм(т) поступает на первый вход блока сравнения 9. На второй вход этого блока поступает сигнал Vorn(t) с выхода буферного регистра 17. Измеренное и рассчитанное значения разряжения сравниваются между собой.
При работе устройства возможны следующие 5 ситуаций:
1) Vn3M VonT;
2)VM3M Vonr, Vn Vflon (Т.е. 0 Vn Удои);
3) VM3M VonT, Vn Vflon;
4) .u, Vn VAOn:
5) Vn3M VonT, .
Если VM3M V/onT, то на выходе блока сравнения 9 сигнала нет и процесс гидродобычи продолжается без изменения при заданной
скорости папильонирования. Земснаряд работает в оптимальном режиме с учетом ка- витационного запаса (на фиг. 5 отрезок времени от to до ti). При УИзм Vom, vn vAOn сигнал с первого выхода блока сравнения 9
поступает на вход элемента И 11 и на вход исполнительного механизма 13, который увеличивает скорость папильонирования. Это приводит к увеличению разрежения во всасывающем наконечнике и увеличению
количества поступающего грунта. В результате такого регулирования устанавливается равенство ,
При увеличении глубины забоя или перехода на более слабый для разработки
грунт (на фиг. 5 отрезок от ti до t2) скорость папильонирования достигает максимально допустимого значения () и если соотношение VHSM VOFIT при этом сохраняется,
то сигнал с выхода датчика 8 скорости папильонирования через открытый элемент И 11 поступает на вход исполнительного механизма 14, который уменьшает глубину зоны размыва h(t) перед устьем всасывающего наконечника путем выдвижения телескопической стрел ы.Лдскольку
WtV- r fl Va(l(4 )
ВД- г0 { Ј vp(t) . С-.;
где fo - радиус устья всасывающего наконечника;
vB(t)-скорость движения пульпы во всасывающем трубопроводе;
vp(t) - скорость размыва грунта;
h(t)- расстояние отустья всасывающего наконечника до грунта, и объем размываемого грунта, поступающий во всасывающий наконечник, равен Qp(t)-Q,t(t) л го2- vB(t)-2w vp(i) h2(t)(5), то это приводит к уменьшению расхода Qn(t) и увеличению разрежения /изм(1) в соответствии с (5) и (2). Изменение глубины размыва происходит до тех пор, пока не будет обеспечено равенство VM3M VoriT. При этом значении h(t) и данных условиях земснаряд работает в оптимальном режиме. Если условия работы изменяются, например, уменьшается глубина забоя, то изменяется разрежение во всасе, т.е. /Изм V0nr, и ис- полнительный механизм 13 уменьшает скорость папильонирования. Сигнал на выходе датчика 8 папильонирования исчезает, т.к. Vn и исполнительный механизм 14 увеличивает глубину зоны размыва, задвигая стрелу обратно. Таким образом, регулируется глубина зоны размыва.
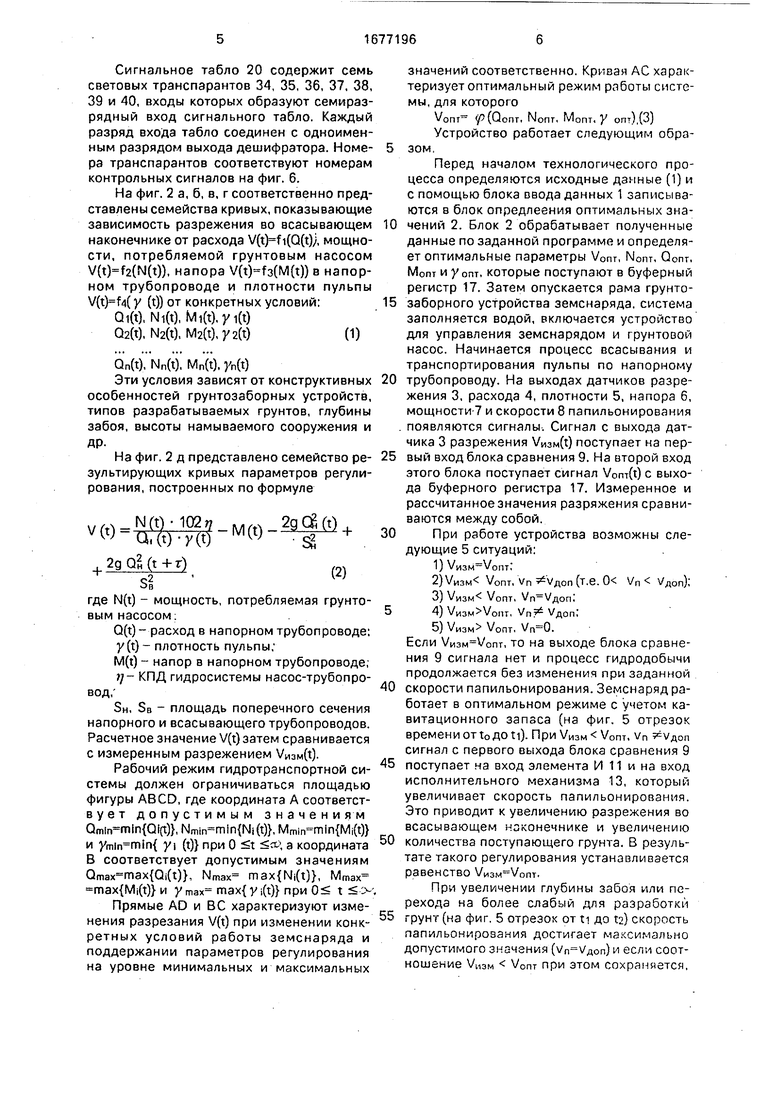
Если при задвинутой стреле сохраняется соотношение Уизм У0лт, а скорость папильонирования уменьшилась до нуля, т.е. УггЮ, что во зможно при засорении всаса из-за завала в забое или переходе наиболее тяжелый тип грунта (на фиг, 5 отрезок от t2 до гз), то сигнал с выхода датчика 8 скорости палильонировзния поступает через открытый элемент И 12 на вход,исполнительного механизма 15, который включает рыхлитель (или эжектор). Разрыхленный завал размывается, разрежение во всасе уменьшается и скорость папильонирования увеличивается.
Работу устройства и земснаряда контролируют блок сравнения 10. По сигналу VIMM /опт, поступающему с выхода элемента ИЛИ 18 измеренные параметры Мизм, Оизн. У изм и Мизм сравниваются с вычисленными Мопт, Оопт, У опт и Мот соответственно. Результаты сравнения поступают на вход дешифратора 19, который включает сигнальное табло 20, отключает исполнительные механизмы 14,13 и 15 или включает
дополнительные исполнительные механизмы 16, например, предохранительные клапаны, заслонки или др, в зависимости от конкретной ситуации. Например, если в ре- зультате сравнения параметров NMSM N0nT,
Оизм Оопт, УИЗМ УОПТ И Миэм Мопт на
выходе элемента И 32 дешифратора появляется сигнал, то включается пятый транспарант с надписью Неисправен датчик М, а
если сигнал появляется на выходе элемента И 31, то включается второй транспарант Заиление трубопровода и исполнительный механизм 16 поднимает раму, в результате чего трубопровод промывается водой и
др.
Для системы из пяти датчиков при данной схеме их включения и работы теоретически возможно
К /2°+21 х4+ 22х6+ 23х4+
различных комбинаций, т.е, кроме оптимального режима устройство может идентифицировать 30 ситуаций в регулировочном режиме и 132 диагностических ситуаций. На практике часть этих ситуаций является невозможными по физической природе. В табл. на фиг. 6 приведены в качестве примера некоторые возможные ситуации. Здесь знаком + обозначено превышение, - - уменьшение измеренного параметра над
допустимым, а О - соответствие этих параметров. В данном устройстве дешифратор и табло идентифицирую семь различных ситуаций, однако их количество можно увеличить, внеся изменения в схему
дешифратора.
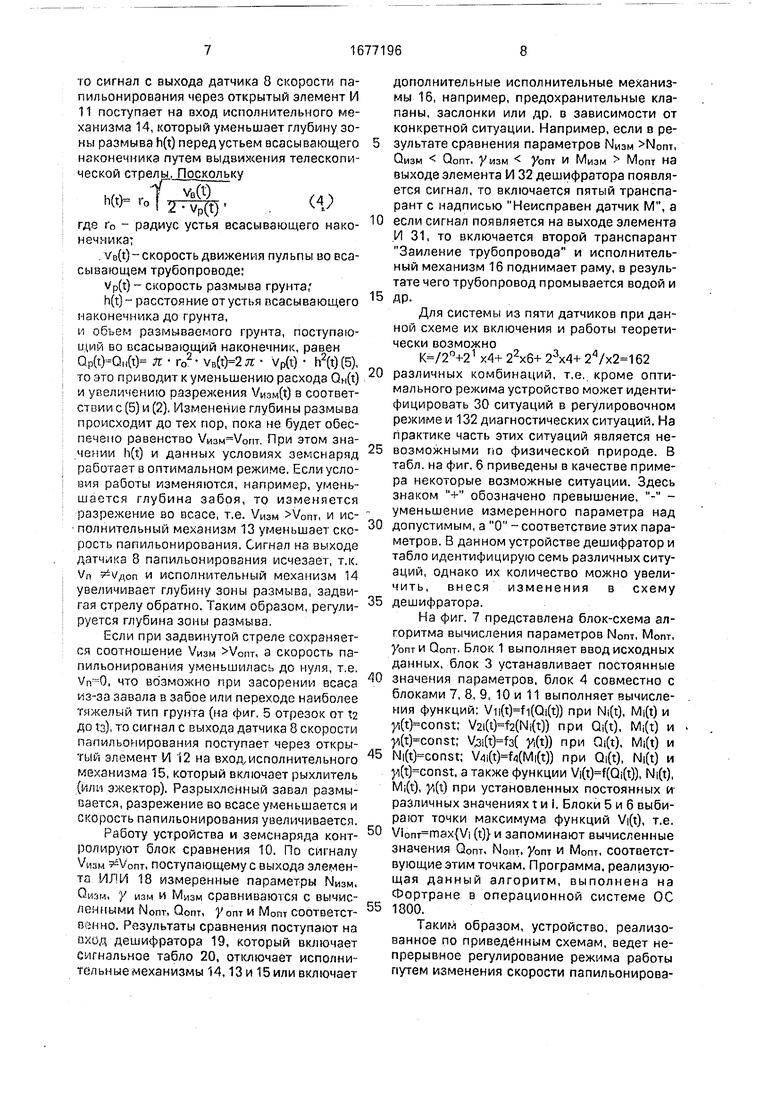
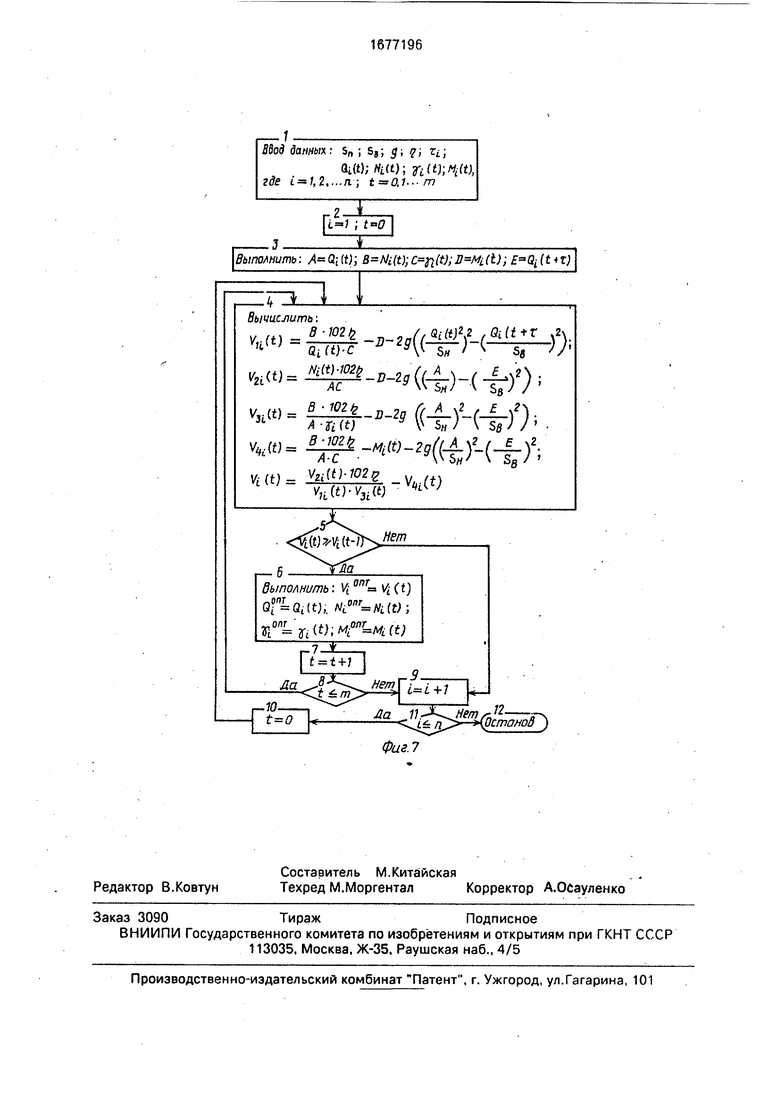
На фиг. 7 представлена блок-схема алгоритма вычисления параметров М0пт, Мопт, УОПТ и Оопт. Блок 1 выполняет ввод исходных данных, блок 3 устанавливает постоянные
значения параметров, блок 4 совместно с блоками 7, 8, 9, 10 и 11 выполняет вычисления функций: Vii(t)fi(Qi(t)) при Ni(t), Mi(t) и yi(t)const; V2i(t)f2(Ni(t)) при Qj(t), M,-(t) и yi(t)const; Vsi(t)f3( yi(tj) при Qi(t), Mi(t) и
Ni(t)const; V4i(tHi(Mi(t)) при Qi(t), Ni(t) и yi(t)const, а также функции Vj(t)f(Qi(t)), Ni(t), Mi(t), y,(t) при установленных постоянных и- различных значениях t и I. Блоки 5 и 6 выбирают точки максимума функций Vi(t), т.е.
0 Vi0nr max{Vj (t)} и запоминают вычисленные значения 0ОПт, N0m-, УОПТ и М0пт, соответствующие этим точкам. Программа, реализующая данный алгоритм, выполнена на Фортране в операционной системе ОС
5 1800.
Таким образом, устройство, реализованное по приведённым схемам, ведет непрерывное регулирование режима работы путем изменения скорости папильонирования, глубины разработки и управления механизмом рыхления. При этом разрежение во всасывающем наконечнике, а также расход, плотность пульпы, мощность грунтового насоса и напор в напорном трубопроводе поддерживается на оптимальном уровне, что позволяет повысить производительность земснаряда, а устранение кавитаци- онных режимов повышает срок службы грунтового насоса и проточной части конструкции.
Формула изобретения 1. Устройство для управления землесосным снарядом, содержащее датчики расхода, плотности пульпы, напора, мощности грунтового насоса и датчик разрежения, выход которого соединен с входом блока сравнения, выход которого соединен с входом исполнительного механизма, отличающееся тем, что, с целью повышения эффективности работы земснаряда за счет повышения точности и надежности управления, устройство снабжено датчиком скорости папильонирования, вторым блоком сравнения, вторым, третьим и четвертым исполнительными механизмами, элементом ИЛИ, первым и вторым элементами И, дешифратором, сигнальным табло, блоком оп- ределения оптимальных значений, буферным регистром и блоком ввода данных, выход которого соединен с входом блока определения оптимальных значений, выход которого соединен с входом буферного регистра, группа из четырех выходов которого соединена с первой группой из четырех входов второго блока сравнения, а последний выход буферного регистра соединен с вторым входом первого блока сравнения, второй выход которого соединен со вторым входом первого исполнительного механизма, первым входом элемента ИЛИ и первым входом первого элемента И, выход которого соединен с первым входом второго исполнительного механизма, а второй вход соединен с первым выходом датчика скорости папильонирования, второй выход которого соединен с первым входом второго элемента И, выход которого соединен с первым входом третьего исполнительного механизма, а второй вход-с первым выходом первого блока сравнения и вторым входом элемента ИЛИ, выход которого соединен с входом второго блока сравнения, вторая группа из четырех входов которого соединена с выходами датчиков расхода, плотности пульпы, напора в напорном трубопроводе и мощности грунтового
насоса, а выход соединен с входом дешифратора, выход которого соединен с входами сигнального табло и четвертого исполнительного механизма, а также с вторыми вхо- дами второго и третьего исполнительных механизмов и третьим входом первого исполнительного механизма.
2.Устройство по п. 1, отличающее- с я тем, что второй блок сравнения содержитчетыре элемента И и четыре компаратора, первые входы которых образуют вторую группу из четырех входов блока сравнения, а вторые вхбды соединены с выходами соответствующих элементов И, первые входы
которых соединены вместе и образуют вход блока сравнения, а вторые входы являются первой группой из четырех входов блока сравнения, первые и вторые выходы компараторов образуют в совокупности восьмиразрядный выход блока сравнения,
3.Устройство по п. 1, отличающее- с я тем, что дешифратор содержит пять элементов И,-причем первый вход первого элемента И соединен с первыми входами
второго, четвертого и пятого элементов И, второй вход первого элемента И соединен с вторым входом четвертого элемента И, четвертый вход первого элемента И соединен с третьим входом второго элемента И, второй
вход второго элемента И соединен с первым входом третьего элемента И и с третьим входом четвертого элемента И, четвертый вход второго элемента И соединен с вторым входом третьего элемента И, а четвертый
вход четвертого элемента И соединен с вторым входом пятого элемента И, при этом первый вход первого, второй вход второго, третий вход первого, четвертый вход второго, второй вход четвертого, третий вход второго и второй вход пятого элементов И являются первым, третьим, четвертым, пятым, шестым, седьмым и восьмым разрядами соответственно восьмиразрядного входа дешифратора, выходы первого, второго,
третьего, четвертого и пятого элементов И являются первым, третьим, пятым, шестым и седьмым разрядами семиразрядного выхода дешифратора, а второй и четвертый разряды восьмиразрядного входа являются
вторым , четвертым разрядами семиразрядного выхода дешифратора.
4.Устройство поп. 1, отличающее- с я тем, что сигнальное табло содержит семь транспарантов, каждый из которых
имеет один вход, которые в совокупности образуют семиразрядный вход сигнального табло.
Дд АГ Д Д
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1717742A1 |
| Устройство для автоматизированного управления земснарядом | 1990 |
|
SU1803504A1 |
| Устройство для управления землесосным снарядом | 1984 |
|
SU1258959A1 |
| Устройство для управления землесосным снарядом | 1987 |
|
SU1437486A2 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| Регулятор управления режимом работы землесосного снаряда | 1986 |
|
SU1451223A1 |
| Система для управляемого обрушения подводных забоев земснарядом | 1990 |
|
SU1789608A1 |
| Устройство для управления процессом грунтозабора землесосного снаряда | 1988 |
|
SU1555434A1 |
| Способ контроля степени износа грунтового насоса земснаряда | 1990 |
|
SU1787896A1 |
Изобретение относится к автоматизации землесосных снарядов, используемых в транспортном и гидротехническом строительстве. Цель - повышение эффективности работы земснаряда за счет повышения точности и надежности управления. Устройство содержит блок 1 ввода данных, блок 2 определения оптимальных значений, датчики 3-8 разряжения, расхода, плотности пульпы, напора, мощности грунтового насоса, скорости, папильонирования, блоки сравнения (БС) 9, 10, элементы И 11 и 12, исполнительные механизмы (ИМ) 13-16, буферный регистр (БР) 17, элемент ИЛИ 18, дешифратор 19 и сигнальное табло 20. При этом БС 10 содержит компараторы и элементы И, а дешифратор 19 - элементы И. Сигнальное табло 20 состоит из семи световых транспорантов, входы которых образуют семиразрядный вход табло 20. Каждый разряд входа табло 20 соединен с одноименным разрядом выхода дешифратора 19. С помощью блока 1 в блок 2 записываются исходные данные, он обрабатывает их и определяет оптимальные параметры, которые поступают в БР 17 Затем в процессе работы на выходах датчиков 3-8, появляются сигналы Сигнал с датчика 3 сравнивается в БС с оптимальным значением разрежения с выхода БР 17 Сигнал рассогласования с выхода БС 9 поступает на вход элемента 11 и на вход ИМ 13, который увеличивает скорость папильонирования. При уменьшении разрежения с выхода датчика 8 поступает сигнал через открытый элемент 11 на ИМ 14, который уменьшает глубину зоны размыва. При нулевой скорости папильонирования сигнал с выхода датчика 8 через открытый элемент И 12 поступает на вход ИМ 15, который включает рыхлитель. Работу устройства и земснаряда контролирует БС 10 При наличии на его входе сигнала рассогласования с выхода БС 9 через элемент ИЛИ 18 измеренные параметры с датчиков 4-7 сравниваются в БР 17 с их оптимальными значениями. Результаты сравнения поступают на вход дешифратора 19, который включает табло 20, отключают ИМ 13-15 или включает дополнительные ИМ (предохранительные клапаны, заслонки и др) 3 з п ф-лы, 7 ил (Л о XI XI о
ffl(.n max
От
6CJ(
О :. Ъ; 0-0; .л
о О
Глина
Фиг.
А
:. Ъ; 0-0; .л
о О
о . -о
Гравий
Лесок
Фиг.5
Фиг. 6
данных: 5„ ; Sg; $; 4; TL;
Oift); Wi«); fiW-M t), где ,2,...n; ,i---rn
L-I ; f-g |
Выполнить: A-Qi(t); (t)(t)(t); )
k t tY . :r
Вычислить:
(0. «,(H,
);.
№ - °-4(-i)-()z; )tCWHtHN SE.
- 6
выполнить: VЈ 0/7r vj (t) ,
(tr..d)
M tfcr&sri-i+l
/feas fcg
0tf..7
| Попов Ю.А., Рощупкин Д.В., Пенсякин Т.И | |||
| Инженерные основы регулирования и оптимизации режимов работы земснарядов | |||
| Учебное пособие для студентов строи- тельных вузов | |||
| Новосибирск, НИСИ им | |||
| В.В | |||
| Куйбышева, 1976 | |||
| Прибор для преобразования переменного тока в постоянный или постоянного тока в переменный | 1927 |
|
SU13203A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления землесосным снарядом | 1984 |
|
SU1258959A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
