1
Изобретение относится к гидроме- ханиэации, а именно к устройствам автоматизации землесосных снарядов при добыче полезных ископаемых.
Целью изобретения является повышение точности и надежности управления.
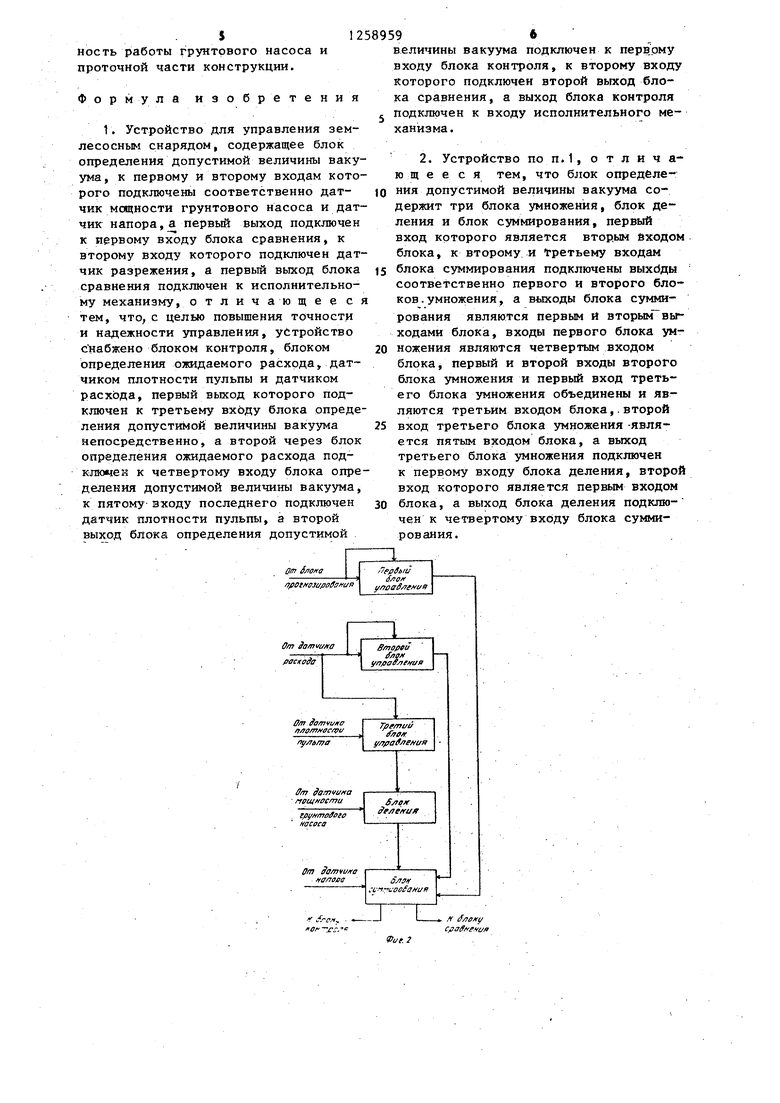
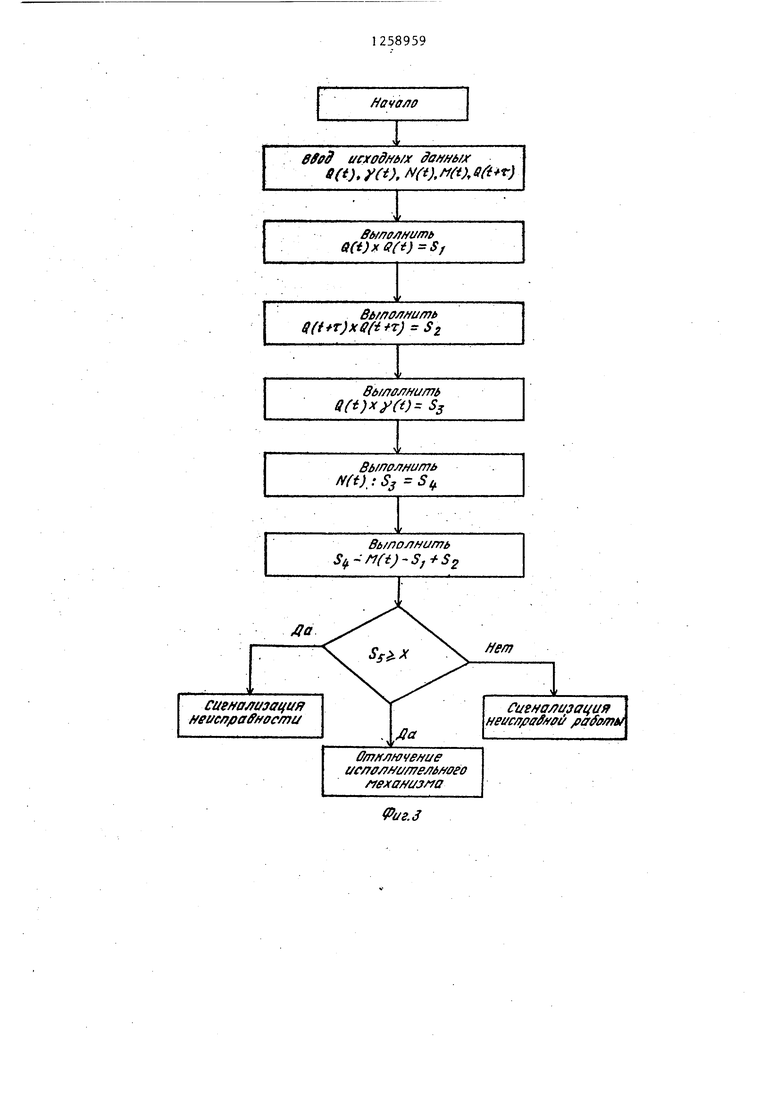
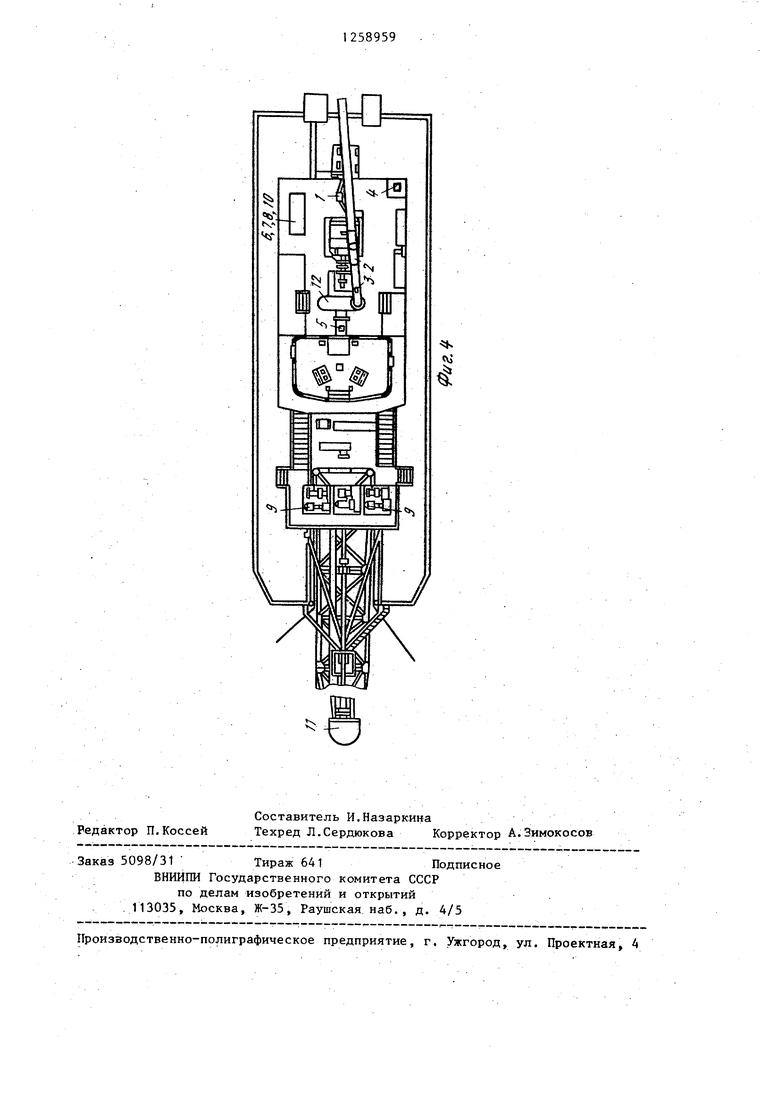
На фиг.1 представлена блок-схема устройства; на фиг.2 - блок-схема блока определения допустимой величины вакуума; на фиг.З - алгоритмы работы блока определения допустимой величины вакуума; на фиг.4 - землесосный снаряд с расположением устройства для управления, общий вид.
Устройство содержит датчики 1 расхода, плотности 2 пульпы, напора 3, установленные на напорном трубопроводе, датчик 4 мощности грунтового насоса, датчик 5 разрежения, бло 6 определения ожидаемого расхода, блок 7 определения допустимой величины вакуума, блок 8 сравнения, исполнительный механизм 9 и блок 10 контроля.
Датчики 1 расхода, плотности 2 пульпы, напора 3, мощности 4 грунтового насоса подключены к блоку 7 определения допустимой величины вакуума, на вход которого подключен также блок 6 определения ожидаемого расхода, связанный, в свою очередь, с датчиком 1 расхода, а вьпсоды блока 7 определения допустимой величин вакуума соединены со входа ми блока 8 сравнения и блока 10 контроля, при этом блок 8 сравнения соединен также с датчиком 5 разрежения, испонительным механизмом 9 и блоком 10 контроля.
Устройство работает следукицим образом.
Опускается рама грунтозаборного устройства 11 землесосного снаряда, заполняет систему водой, включает устройство для управления землесосным снарядом, а затем включает грунтовый насос 12 (фиг. 4).
Начинается процесс всасывания и транспортирования пульпы по напор ному трубопроводу. На выходах датчика 1 расхода, плотности 2,напора 3, мощности 4, разрежения 5 появляются сигналы.
Блок 6 определения ожидаемого расхода на основе показаний расхода 1 определяет величину расхода в напорном трубопроводе через время
2
,
25
58959
соответствующее времени прохождения пульпы из всасывающего трубопровода через грунтовый насос, в напорный трубопровод.
5 Регулирование ведется по пяти каналам: расходу, плотности пульпы, напору, мощности грунтового насоса, разрежению.
Сигналы с датчиков 1-4 и блока 6
10 определения ожидаемого расхода поступают на блок 7 определения допустимой величины вакуума, в котором значения сигналов с датчика 1 расхода и блока 6 определения ожидаемого
15 расхода возводятся во вторую степень, определяется произведение сигналов с датчика расхода 1 и датчика плотности 2, и величина сигнала с датчика мощности 4 делится на это произве20 дение. Далее определяется с.умма сигналов в блоке суммирования с датчика 3 напора, с первого и второго блоков умножения и блока деления.
Величина сигнала с блока 7 определения допустимой величины соответствует оптимальной величине разрежения во всасе.
Эта величина в блоке 8 сравнения сравнивается с величиной существующего разрежения, поступающего с датчика 5 разрежения.
Вькодной сигнал блока 8 сравнения управляет работой исполнительного механизма 9.
Если сигнал с датчика 5 разрежения больше, чем сигнал с блока определения допустимой величины вращения, то исполнительньш механизм увеличивает скорость папильонирования. Это приводит к увеличению количества поступающего грунта, изменению плотности пульпы, изменениям показаний, посту1|1ающих с других датчиков и, соответственно, к увеличению сигнала с ,/ определения допустимой величины вакуума. Скорость папильонирования, так же как и количество посту- пакяцего грунта, будет увеличиваться до тех пор, пока разрежение во всасе не достигает оптимального, т.е. максимально возможного значения в данных условиях с учетом кавитационного запаса.
Если произойдет засорение всаса и разрежение превысит оптимальное, то исполнительньй механизм 9 уменьшает скорость папильонирования, потоком воды постепенно размьшается за30
35
40
45
50
55
31258959
вал, разрежение уменьшается и скорость папильонирования увеличивается
Таким образом, в процессе работы разрежение во всасе поддерживается на оптимальном уровне, отсутствует s кавитационный режим, повышается про-- изводительность землесосного снаряда, срок службы грунтового насоса и проточной .части конструкции.
Работу устройства контролирует 10 блок 10 контроля. Если в процессе работы выйдет из строя один из управляющих блоков или датчиков или сразу несколько, то это приведет к тому, что сигнал на выходе блока 8 сравне- 15 где Q,(t) - расход в напорном трубопроводе J
y(t) - плотность пульпы; H(t) - полный напор, развиваемый грунтовым насосом; 20 1 коэффициент полезного
действия системы трубопровод- грунтовый насос; N(t) - мощность, потребляемая
проходит из всасывающего трубопровода через грунтовый насос в напор ный трубопровод; Q(t) - расход в напорном трубопроводе ;
) - расход в напорном трубопроводе,
В то же время мощность, потребляемая грунтовым насосом, определяется из выражения
N(t) -.l liiLli. (4)
ния будет иметь значение, отличное от возможных значений, характерных для исправной работы устройства.
В этом случае блок 10 контроля отключает исполнительный механизм и приводит в действие сигнализацию, при З.ТОМ полный напор пульпы, разви- ваекый грунтовым насосом, определяетгде Q,(t) - расход в напорном трубопроводе J
проходит из всасывающего трубопровода через грунтовый насос в напорный трубопровод; Q(t) - расход в напорном трубопроводе ;
) - расход в напорном трубопроводе,
В то же время мощность, потребляемая грунтовым насосом, определяется из выражения
N(t) -.l liiLli. (4)
ся из выражения
H(t) - M(t) + v(t) -h lijlr lc(i)(i)
где H(t) - полный напор, развиваемый грунтовым насосом; V(t) - реальное разрежение во
всасе}
M(t) - напор в напорном трубопроводе J- скорость движения пульпы в напорном трубопроводе
скорость движения пульпы во всасыванядем трубопроводе при непрерыв- в ном потоке.
Количество пульпы, которое всасывает земпесосный снаряд, равно количеству пульпы, подаваемой в напорный трубопровод
v(t)
V
(t)
Vjt)
де
ее
-площадь поперечного се- 50 чения напорного трубопровода;
-площадь поперечного сечения всасывающего трубопровода i55
-постоянная транспортного запаздьшания.или время, за которое пульпа
грунтовым насосом. Выразив из (А) H(t) и приравняв к выражению (1), выразим V(t), равное оптимальному разрежению во всасе V (t)
30
. 1Ште-)2gQ2ff) )
(5)
40
50 55
35 .величины ч , -x , . „; постоянны,
a величины N(t) , Q(t), Y(t) M(t) - переменные.
Ha основании изложенного.видно, что только величины мощности грунтового насоса N(t), напора в напорном трубопроводе M(t), и плотности пульпы Рц(г) определяют режим работы землесосного снаряда и только эти величины можно использовать для определения разрежения во всасывающем трубопроводе и по ним можно вести регулирование всего технологического процесса добычи..
Устройство ведет непрерывное регулирование по пяти параметрам, что позволяет повысить производитель ность землесосного снаряда за счет улучшения качества регулирования, устранить кавитационные режимы за счет точного поддержания параметров процесса, а также повысить долговеч45
ность работы грунтового насоса и проточной части конструкции.
Формула изобретения
1. Устройство для управления землесосным снарядом, содержащее блок определения допустимой величины вакуума, к первому и второму входам которого подключены соответственно датчик мощности грунтового насоса и датчик напора,а первый выход подключен к первому входу блока сравнения, к второму входу которого подключен датчик разрежения, а первый выход блока сравнения подключен к исполнительному механизму, отличающееся тем, что, с целью повышения точности и надежности управления, устройство снабжено блоком контроля, блоком определения ожидаемого расхода, датчиком плотности пульпы и датчиком расхода, первый выход которого подключен к третьему входу блока определения допустимой величины вакуума непосредственно, а второй через блок определения ожидаемого расхода подключен к четвертому входу блока определения допустимой величины вакуума, к пятому входу последнего подключен датчик плотности пульпы, а второй выход блока определения допустимой
зо
89596
величины вакуума подключен к первому входу блока контроля, к второму входу которого подключен второй выход блока сравнения, а выход блока контроля подключен к входу исполнительного механизма.
2. Устройство по п.1, о т л и ч а- ю щ е е с я тем, что блок опредбления допустимой величины вакуума содержит три блока умножения, блок деления и блок суммирования, первый вход которого является вторым входом блока, к второму и Третьему входам
блока суммирования подключены выхЬды соответственно первого и второго блоков .умножения, а выходы блока суммирования являются первым и вторым вьг- ходами блока, входы первого блока умножения являются четвертым входом блока, первый и второй входы второго блока умножения и первый вход третьего блока умножения объединены и являются третьим входом блока,.второй вход третьего блока умножения -является пятым входом блока, а выход третьего блока умножения подключен к первому входу блока деления, второй вход которого является первым входом блока, а выход блока деления подклю- чен к четвертому входу блока суммирования.
efffd ucxodffA/x dafff/6/jf
e(f}. y(-t). /vva (). ft)
Q(t)}(S(t)Sf
Bi f/ro/fffumi e(()) $2
Вб/Лв/ НиП71
Q(t)x(t) Ss
Вь/полмитА N{t),: Sj - Sfy
Вь/лолнить (i)Sf-i-S2
Начало
CUfffo/fvyatft/ff f/evMflaffffocmu
Ma
Casffa/ tJ3atiUff Hei/cffjc ffffw jpfffy/nt/
ffm/f №4e ue i/c/7ff f e//77eM/ oeo
/W/r/7/%/7/V/7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления землесосным снарядом | 1987 |
|
SU1437486A2 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1717742A1 |
| Устройство для управления землесосным снарядом | 1989 |
|
SU1677196A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ УСТРОЙСТВАМИ РАБОЧИХ ПЕРЕМЕЩЕНИЙ ЗЕМЛЕСОСНОГО СНАРЯДА | 2002 |
|
RU2237782C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ПОТОКА ГИДРОСМЕСИ ВО ВСАСЫВАЮЩЕМ ТРУБОПРОВОДЕ ЗЕМСНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2039163C1 |
| Устройство для автоматического управления землесосным снарядом | 1985 |
|
SU1382918A1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЗЕМСНАРЯДА | 2010 |
|
RU2426838C1 |
| Регулятор управления режимом работы землесосного снаряда | 1986 |
|
SU1451223A1 |
Изобретение относится к области гидромеханизации и позволяет повысить точность и надежность управления землесосным снарядом. Для этого управление ведется путем непрерывного регулирования по пяти параметрам, влияющим на процесс экскавации и измеряемым датчиками расхода 1-5 соответственно плотности, напора, мощности грвнтового насоса и разрежения. Сигналы с датчиков 1-4 и с бло ка 6 определения ожидаемого расхода поступают в блок 7 определения допуо тимой величины вакуума. С выхода блока 7 величина, соответствующей оптимальной величине разрежения во всасе, поступает в блок 8 сравнения. В блоке 8 эта величина сравнивается с величиной разрежения с датчика 5. При уменьшении вычисленной величины разрежения по сравнению с текущей исполнительный механизм (ИМ) 9 увеличивает скорость папильонирования до тех пор, пока разрежение во всасе не достигнет оптимального. При засорении всаса разрежение превысит оптимальное и ИМ 9 уменьшит скорость папильонирования. Исправная работа устройства контролируется блоком 10 контроля. При выходе из строя одного или нескольких блоков устройства блок 10 по сигналу с блока 8 отключает ИМ и сигнализирует о неисправности. 1 з.п. ф-лы, 4 ил. с S (Л ю с ел 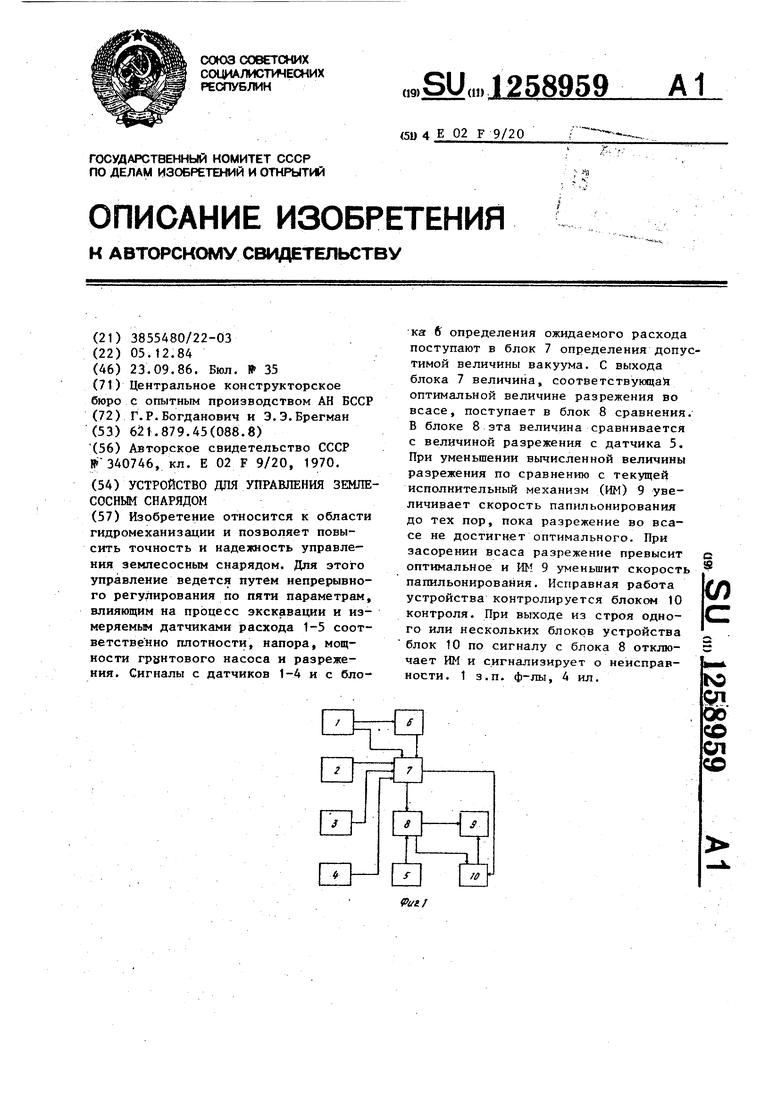
Редактор П.Коссей
Составитель И.Назаркина
Техред Л.Сердюкова Корректор А.Зимокосов
Заказ 5098/31 Тираж 641Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий.
.113035, Москва, Ж-35, Раушская наб., д. 4/5
Произзодственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПЛАВУЧИМ ЗЕМЛЕСОСНЫМСНАРЯДОМ | 0 |
|
SU340746A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
