Предлагаемое устройство относится к средствам вычислительной техники и может быть использовано при моделировании систем с асинхронными двигателями.
Известно, что механическая характеристика асинхронного двигателя из-за влияния активного сопротивления статора на магнитный поток в воздушном зазоре, выражаемого через отношение активных сопротивлений статора к приведенному сопротивлению ротора, имеет неодинаковые максимальные моменты в генераторной и двигательной областях, причем максимальный момент в генераторной области .больше максимального (критического) момента в двигательной области.
Кроме того, известно, что на механическую хара1кте|ристи.ку асинхрон.ното двигателя в пусковом режиме, т. е. на .пусковую характеристику двигателя, большое влияние оказывает собственная инердионность двигателя, приведенная ине.р1циоБность нагрузки, яотери в двигателе, пропорциональные скО|рости, и момент нагрузки.
Известное устройство для моделирования асинх,ронного двигателя по авт. св. № 219921, содержащее два сумматора, блок коэффициентов, функциональный блок -с характеристи;кой ограничения, блок умножения и блок деления, не учитывает влияния отношения активного сопротивления статора к приведенному активному сопротивлению ротора на механическую характеристику и параметров нагрузки (приведенной инерционности и момента сопротивления), собственной инерционности и потерь, пропорциональных скорости, на пусковые характеристики асинхронного двигателя.
Предложенное устройство для 1моделирования acKHXipoHHoro двигателя отличается тем,
что с целью расширения его функциональных возмож.ностей оно содержит интегратор с обратной связью. Выход функционального блока с характеристикой ограничения подключен к входу одного Сум-матора, соединенного
другими входами с выходом блока умножения и источником -ПОСТОЯННОГО напряжения, а выходом - с ВХОДОЛ1 блока деления, выход которого подключен к одному в.ходу интегратора с обратной связью. Другой вход этого
интегратора подключен к источнику постоянного напряжения, а БЫХОД соединен с входом другого сумматора.
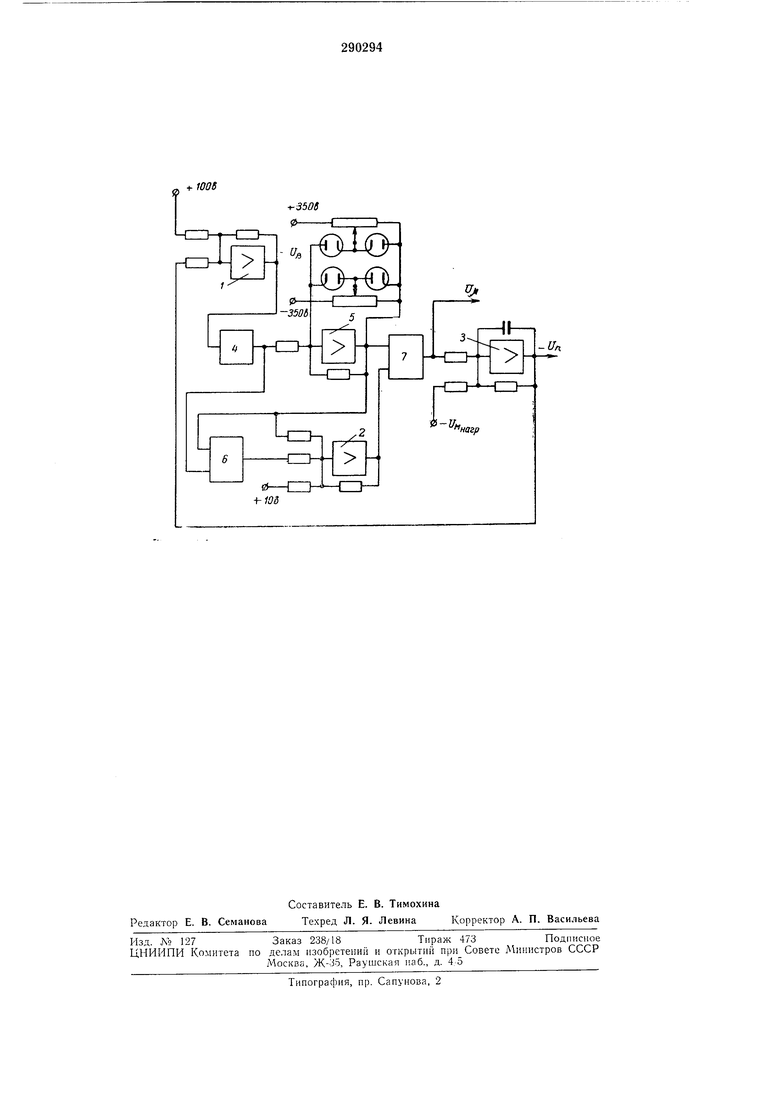
На чертеже представлена блок-схема предлагаемого устройства.
Предлагаемое устройство содержит сумматоры / и .2, интегратор 3, блок коэффициентов 4, функциональный блок 5 с характеристикой ограничения, блок умножения 6 и блок деления 7.
Кроме того, на чертеже приведены следующие обозначения:
/3- напряжение, иропорциональное
абсолютному скольлсению р, и - наиряжение, проорциональное
электромагнитному моменту ц, и„ - напряжение, пропорциональное
скорости выходного вала п, (мнагр- - напряжение, пропорциональное
моменту сопротивления нагрузки Л1нагр
Напряжение с выхода устройства, пропорциональное числу оборотов п вала асинхронного двигателя, и постоянное напряжение, соответствующее синхронной скорости моделируемого двигателя, подаются на сумматор 1. В результате суммирования на его выходе получается напряжение /э, пропорциональное абсолютному скольжению р.
Напряжение t/p с выхода сумматора 1 поступает на блок коэффициентов 4 (блок делителей напряжения), с выхода которого напряжение, пропорциональное отношению текущего значения абсолютного скольжения к критическому, подается на блок умножения 6 и на функциональный блок 5 с характеристикой ограничения.
С выхода блока 5 напряжение поступает одновременно на блок деления 7, на второй вход блока умножения б и на сумматор 2, другие входы которого подключены к выходу блока умножения 6 и к источнику постоянного напряжения.
Напряжение с выхода сумматора 2 поступает на второй вход блока деления 7, на выходе которого в результате деления получается напряжение U , пропорциональное электромагнитному моменту (Л, развиваемому магнитным потоком в воздушном зазоре двигателя.
Напряжение f/jj. подается на вход интегратора 3, охваченного отрицательной обратной связью, глубина которой определяется потерями, пропорциональными скорости двигателя, на второй вход которого подается напрялсение Лнагр, пропорциональное моменту сопротивления нагрузки. С выхода интегратора 3 снимается напряжение t/n, пропорциональное числу оборотов п, которое подается на входной сумматор 1.
Настройкой функционального блока 5 обеспечивается точное воспроизведение механической характеристики в виде уравнения:
2(1 + 9 3;)
А -
+ hl + 2 ft
где jj, - электромагнитный момент асинхронного двигателя в относительных единицах, q - коэффициент, пропорциональный отношению активного сопротивления статора к приведенному активному сопротивлению ротора, РЛ - абсолютное скольл ение, соответствующее критическому моменту, при текущих значениях абсолютного скольжения (,25 |3ь а
при ,25pft. приближенное (с максимальной ошибкой не более 10-12%) воспроизведение части неустойчивой ветви характеристики в виде уравнения:
,, 2(l-f9pft)
г -
i/P + 0,8 + 2
Настройкой интегратора обеспечивается воспроизведение пусковой характеристики в виде следующего уравнения:
M, h - + -/г + „агр.
где Мд - критический момент в двигательной области, /S - суммарный момент инерции двигателя и приведенного момента инерции нагрузки, F - коэффициент потерь, пропорциональных скорости двигателя; Жцагр - момент сопротивления нагрузки.
Предмет изобретения
Устройство для моделирования асинхронного двигателя по авт. св. № 219921, отличающееся тем, что, с целью расширения его функциональных возможностей, оно содержит интегратор с обратной связью, а выход функционального блока с характеристикой ограничения дополнительно подключен к входу одного сумматора, соединенного другими входами с выходом блока умножения и источником постоянного напряжения, а выходом - с входом блока деления, выход которого подключен к одному входу интегратора с обратной связью, другой вход интегратора с обратной связью подключен к источнику постоянного напрялсения, а выход соединен с входом ътоРОГО сумматора.
100S
-Un
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ АСИНХРОННОГОДВИГАТЕЛЯ | 1972 |
|
SU347767A1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1996 |
|
RU2109397C1 |
| Устройство для определения параметров трехфазной асинхронной машины | 1969 |
|
SU553949A3 |
| Устройство для измерения электромагнитного момента электродвигателя | 1980 |
|
SU883675A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |