Изобретение относится к электротехнике, а именно к прецизионным автоматизированным электроприводам, и может найти применение в системах слежения, сопровождения и программного движения.
Целью изобретения является расширение области применения путем формирования сигнала, пропорционального реактивному статическому моменту объекта управления, как при одном направлении его вращения, так и при его реверсировании.
На фиг. 1 представлена функциональная схема моментного электропривода; на фиг.2 даны графики сигналов в установившемся режиме; на фиг.З1 представлены графики переходного процесса при включении электропривода, полученные на ЭВМ.
Моментный электропривод содержит моментный электродвигатель 1, объект 2 управления, датчик 3 угла, датчик 4 частоты вращения, компаратор 5, задатчик б входных воздействий, сумматоры 7-9, предварил-ел ьный усилитель 10, перемножители 11,12, интегратор 13.
Ротор моментного электродвигателя 1 механически связан с Объектом 2 управления и с роторами датчиков 3 угла и 4 частоты вращения, выходы которых подключены ко входу сумматора 7 и ко входам сумматоров 8, 9 и компаратора 5, выход которого подключен ко входам перемножителей 11, 12. Первый, второй выходы задатчика 6 входных воздействий подключены ко вторым входам сумматоров 7, 8 соответственно.
Выход сумматора 7 подключен ко входу предварительного усилителя 10, выход которого подключен к третьему входу сумматора 8. Его выход подключен ко вторым входам сумматора 9 и перемножителя 11, выход которого подключен ко входу интегратора 13. Его выход подключен ко второму входу перемножителя 12, выход которого подключен к третьему входу сумматора 9, его выход подключен ко входу моментного электродвигателя 1.
Предварительный усилитель 10 имеет коэффициент усиления 2а2, а первый, второй входы сумматора 8 имеют масштабирующие блоки с коэффициентом 2а. Оервый-третий входы сумматора 9 имеют масштабирующие блоки с коэффициентами iZ/T.fl, I2,
где
А - коэффициент, определяющий соотношение между среднеквадратической ошибкой и мощностью потерь в обмотке якоря моментного электродвигателя;
12 - суммарный момент инерции подвижных частей электропривода;
Т - постоянная времени интегратора 13.
Электропривод работает следующим образом. На первом выходе задатчика 6 вырабатывается сигнал OG (t) - входное воздействие, равное требуемому углу поворота ротора моментого электродвигателя 1 и поступающее на второй вход сумматора 7. На его первый инвертирующий вход поступает сигнал or(t) с выхода датчика 3 угла поворота ротора, а на выходе формируется сигнал ошибки по углу Да (t) аъ (t) - a (t). Этот сигнал усиливается предварительным усилителем 10 и поступает на третий вход сумматора 6. На его второй вход поступает со второго выхода задатчика б сигнал ыь (t).- входное воздействие, равное требуемой частоте вращения ротора моментного электродвигателя (МД) 1, ufe dOo/dt. а на первый вход поступает сигнал w(t) с выхода датчика 4 частоты вращения.
На выходе сумматора 8 формируется сигнал
е° 2 а2 («ь - а) + 2 а (сыь - w),
равный требуемому угловому ускорению ро- тора МД 1. Этот сигнал поступает на второй вход сумматора 9 и на второй вход перемножителя 11, на первый вход которого поступает с выхода компаратора 5 сигнал sign со, т.е. знак частоты вращения а) ротора МД, а
на выходе получается сигнал e°s|gn«o ,
поступающий на вход интегратора 13. На
его выходе вырабатывается сигнал
| (t) «4 Ь°. (t) signw (t) d t. (1)
I о
Этот сигнал поступает на второй вход перемножителя 12, где он перемножается с
сигналом signш. Выходной сигнал u)°(t)/T r (t)l sign w поступает на третий
вход сумматора 9, на первый вход которого приходит сигнал ш (t) с выхода датчика 4 частоты вращения, а на выходе формируется сигнал
55
М
IZ
1° Не0 + у ( - ш) MS + Мс, (2)
равный требуемому электромагнитному моменту и поступающий на вход моментного электродвигателя 1. Здесь Мд° - требуемый динамический момент, Мс - оценка
статического реактивного момента Мс объекта управления 2:
Мс Мт -sign а).
Моментный электродвигатель 1 развивает электромагнитный момент , под действием которого его ротор и объект управления 2 вращаются согласно уравнению
МЭ-МС ЦЕ°+ Мс-Мс at
откуда следует
(ao-a)-t- + 2a(ftfc - ш).
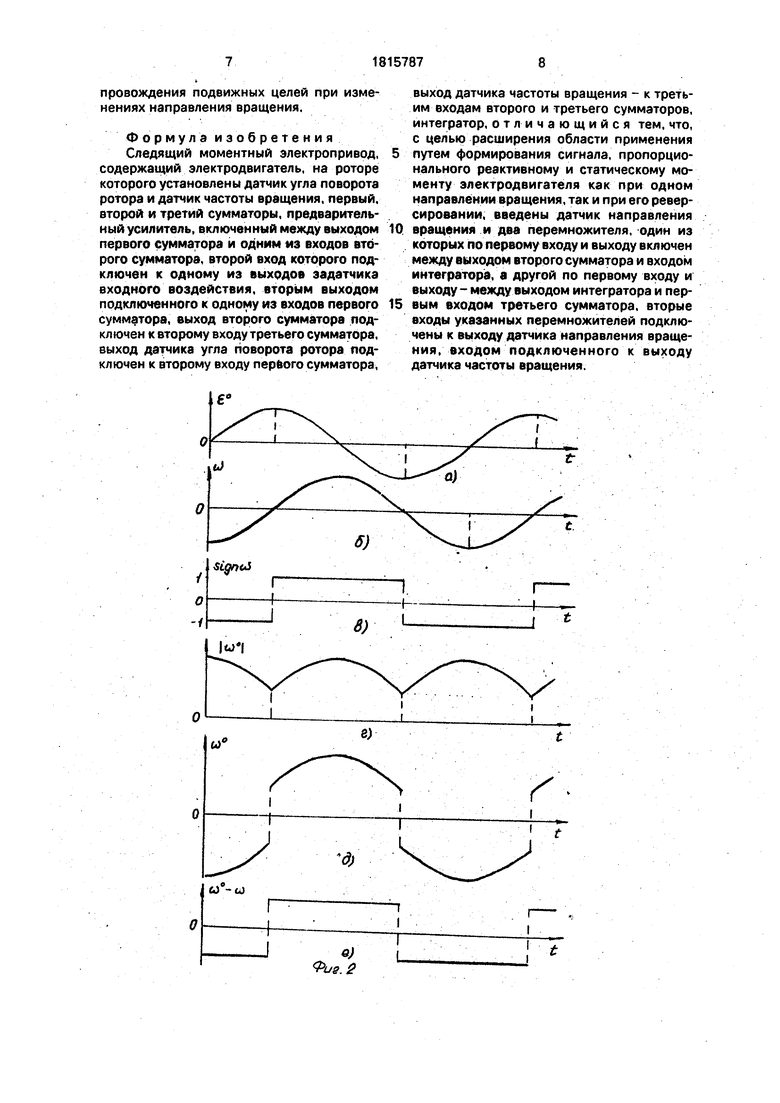
процессе в электроприводе при нулевых начальных условиях и синусоидальном входном воздействии. Обращают внимание быстрые изменения тока якоря МД при из- менении знака (о (t), а также плавное приближение оценки Mm к значению Мт.
Равенства (1) - (3) вытекают из соотношений
10 Мп
te-o
I п
sign t ;;
Ј (М° - мс)/«5: е° + (мт - мт) sign to/12;
15
Mm /(Mm-Mm)dt,
I n
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1988 |
|
SU1642558A1 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2465715C1 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2163414C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Следящая система | 1987 |
|
SU1631513A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Электропривод | 2019 |
|
RU2713185C1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
Использование: в.прецизионных автоматизированных электроприводах, в системах слежения, сопровождения и программного движения. Сущность изобретения: мо- ментный электропривод содержит электродвигатель 1, ротор которого механически связан с объектом управления 2 и с ротором датчиков 3 угла и частоты вращения 4, выходы которых подключены к второму входу сумматора 7, третьим входам сумматоров 8,9 и входу датчика 5 направления вращения (компаратора), выход которого подключен ко входам перемножителей 11,12. Выходы задатчика 6 входных воздействий подключены ко вторым входам сумматоров 7,8 соответственно. Выход сумматора 7 через усилитель 10 связан с первым входом сумматора 8. выход которого через цепь, составленную из последовательно соединенных перемножителя 11, интегратора 13 и перемножителя 12, связан с первым входом сумматора 9, вход которого подключен ко входу электродвигателя 1. Выход сумматора 8 соединен со вторым входом сумматора 9. 3 ил. -г Ј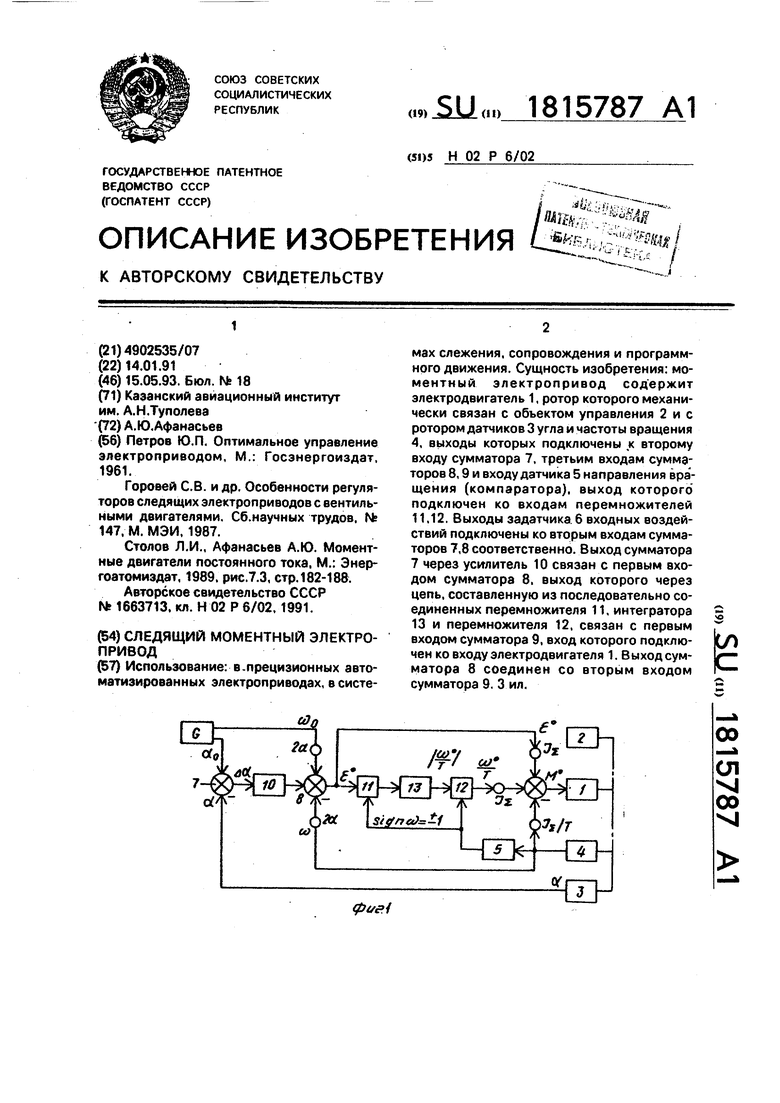
При этом происходит слежение по углу за сигналом Oo(t) согласно уравнению
+ 2а + 2а2я dt2dt
2а +2а2«0. at
причем характеристическое уравнение р2 + 2ар + 2а2 О
имеет корни pi, -а ± ja, т.е. свободная составляющая переходного процесса имеет вид
a (t) ce atsin (at+ p ),
где с, р- произвольные константы.
Статическая и кинетическая ошибки в электроприводе отсутствуют.
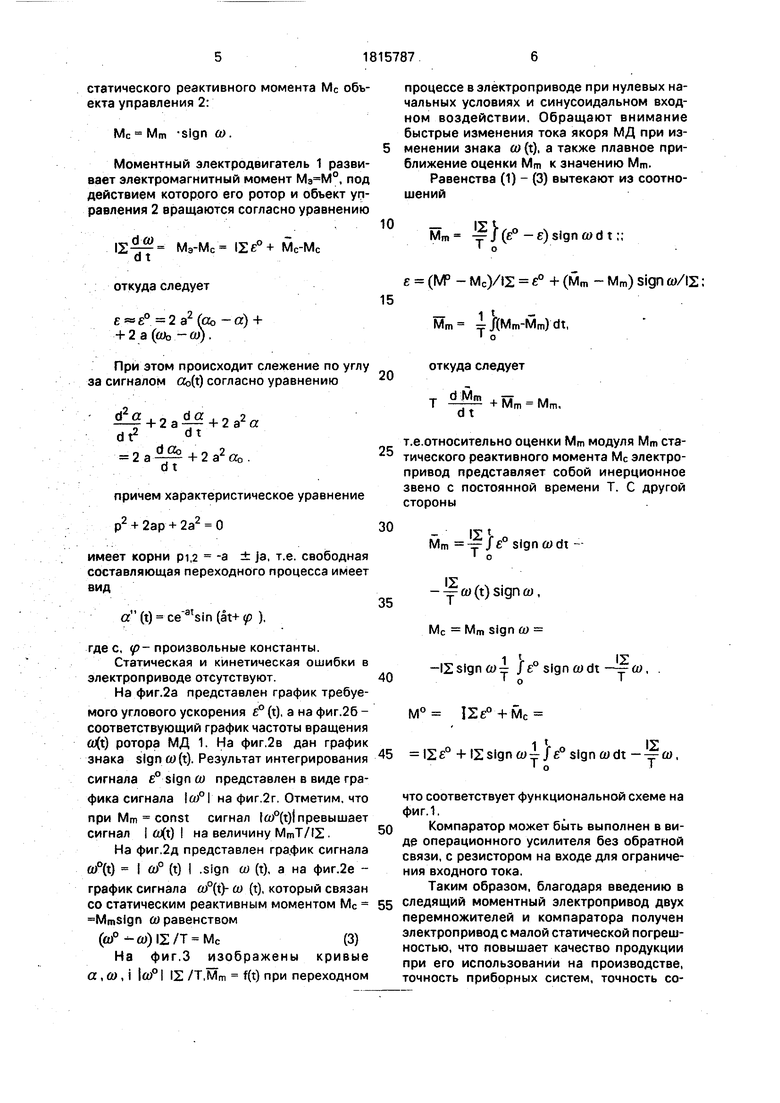
На фиг.2а представлен график требуемого углового ускорения е° (t), а на фиг.2б - соответствующий график частоты вращения fij(t) ротора МД 1. На фиг.2в дан график знака sign со (t). Результат интегрирования
сигнала е° sign со представлен в виде графика сигнала на фиг.2г. Отметим, что при Mm const сигнал (t)l превышает сигнал I u(t) I на величину МтТ/12 .
На фиг.2д представлен график сигнала y°(t) I of (t) I .sign ш (t), а на фиг.2е график сигнала (o°(i)- ш (t), который связан со статическим реактивным моментом Мс -MmSign ш равенством
(ш°-й))12/Т Мс(3)
На фиг.З изображены кривые а, со, i (0° I 12 /Т,Mm f(t) при переходном
откуда следует T d iMm , гт h.
T ---- + Mm Mm,
d t
т.е.относительно оценки Mm модуля Mm ста- тического реактивного момента Мс электропривод представляет собой инерционное звено с постоянной времени Т. С другой стороны
30
|V t
Mm e° slgnwdt I n
|y
- - ш (t) sign ш,
Mc Mm sign ш
1 lIS
-IZslgn u- /Ј°sign(ydt --co, .
M° I2e° + Me
л tly
2e° +12 sign sign to dt ),
Т о
что соответствует функциональной схеме на фиг.1.
Компаратор может быть выполнен в виде операционного усилителя без обратной связи, с резистором на входе для ограничения входного тока.
Таким образом, благодаря введению в
следящий моментный электропривод двух перемножителей и компаратора получен электропривод с малой статической погрешностью, что повышает качество продукции при его использовании на производстве, точность приборных систем, точность сопровождения подвижных целей при изменениях направления вращения.
Формул а из обретения Следящий моментный электропривод, содержащий электродвигатель, на роторе которого установлены датчик угла поворота ротора и датчик частоты вращения, первый, второй и третий сумматоры, предварительный усилитель, включенный между выходом первого сумматора и одним из входов второго сумматора, второй вход которого подключен к одному из выходов эадатчика входного воздействия, вторым выходом подключенного к одному из входов первого сумматора, выход второго сумматора подключён к второму входу третьего сумматора, выход датчика угла поворота ротора подключен к второму входу первого сумматора,
выход датчика частоты вращения - к третьим входам второго и третьего сумматоров, интегратор, отличающийся тем. что, с целью расширения области применения
путем формирования сигнала, пропорционального реактивному и статическому моменту электродвигателя как при одном направлении вращения, так и при его реверсировании, введены датчик направления
вращения и два перемножителя, один из которых по первому входу и выходу включен между выходом второго сумматора и входом интегратора, а другой по первому входу и выходу- между выходом интегратора и первым входом третьего сумматора, вторые входы указанных перемножителей подключены к выходу датчика направления вращения, входом подключенного к выходу датчика частоты вращения.
| Петров Ю.П | |||
| Оптимальное управление электроприводом, М.: Госэнергоиздат, 1961 | |||
| Горовей С.В | |||
| и др | |||
| Особенности регуляторов следящих электроприводов с вентильными двигателями | |||
| Сб.научных трудов | |||
| Раздвижной паровозный золотник со скользящими по его скалке поршнями и упорными для них шайбами | 1922 |
|
SU147A1 |
| МЭИ | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Столов Л.И., Афанасьев А.Ю | |||
| Момент- ные двигатели постоянного тока | |||
| М.: Энер- гоатомиздат, 1989 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Затвор для дверей холодильных камер | 1920 |
|
SU182A1 |
| Следящий моментный электропривод | 1989 |
|
SU1663713A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
