f(a.1
Сигналы датчиков 3 и и теоретической скорости машины вместе с сигналом задатчика 6 буксования постзтают в ВВС 8 буксования. С выходов ВВС 7 и 8 сигналы поступают в блок 15, где происходит формирование команды опускания рабочего орга-М на (РО в зависимости от сигналов рассогласования.и по сигналу с блока 14 выбора режима работы. Выходные сигналы блока 14 поступают на задат 14392724 действительной чик 1 1 , который вместе с датчиком 9
положения РО, элементом 10 вычитания блоком 12 управления подъемом-опуска нием и исполнительным механизмом 13 входит в контур положения РО. В соответствии с командами, поступающими с выхода блока 14 на счетчик задатчи ка 11, который синхронизируется импульсами генератора, происходит опус кание или подъем РО или пoдцepживJ gд ся неизменное его положение. 4 ил.
положения РО, элементом 10 вычитания, блоком 12 управления подъемом-опусканием и исполнительным механизмом 13 входит в контур положения РО. В соответствии с командами, поступающими с выхода блока 14 на счетчик задатчика 11, который синхронизируется импульсами генератора, происходит опускание или подъем РО или пoдцepживJ gд;- ся неизменное его положение. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1420126A1 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1980 |
|
SU899806A1 |
| Устройство управления рабочимиОРгАНАМи зЕМлЕРОйНО-ТРАНСпОРТНыХМАшиН C гидРОМЕХАНичЕСКОй ТРАНСМиССиЕй | 1979 |
|
SU804790A1 |
| Система автоматического управления исполнительными органами очистного комбайна в профиле пласта | 1978 |
|
SU740949A1 |
| Широтно-импульсный N-фазный инвертор | 1989 |
|
SU1815776A1 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1986 |
|
SU1377343A2 |
| Устройство стабилизации угла наклона рабочего органа землеройно-планировочной машины | 1987 |
|
SU1520199A1 |
| Цифровой коммутатор тока катушки зажигания | 1990 |
|
SU1733674A1 |
| СПОСОБ ВЫКЛЮЧЕНИЯ ЖИДКОСТНЫХ РАКЕТНЫХ ДВИГАТЕЛЕЙ СОСТАВНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2079690C1 |

Изобретение относится к строительно-дорожной технике и позволяет повысить точность управления рабочим режимом землеройно-транспортной машины с гидромеханической трансмиссией. Для этого устр-во снабжено датчиками 2 и 3 числа оборотов турбины гидротрансформатора и теоретической скорости машины, блоком 15 формирования команды опускания выполнен из элемента ИЛИ, одновибрато- ра, инвертора и элемента И Угловые скорости вала двигателя и турбины гидротрансформатора воспринимаются датчиками 1 и 2. Вместе с сигналом с задатчика 5 нагрузки сигналы дат,- чиков I и 2 поступают в блок вычисления и сравнения (БВС) 7 нагрузки. (Л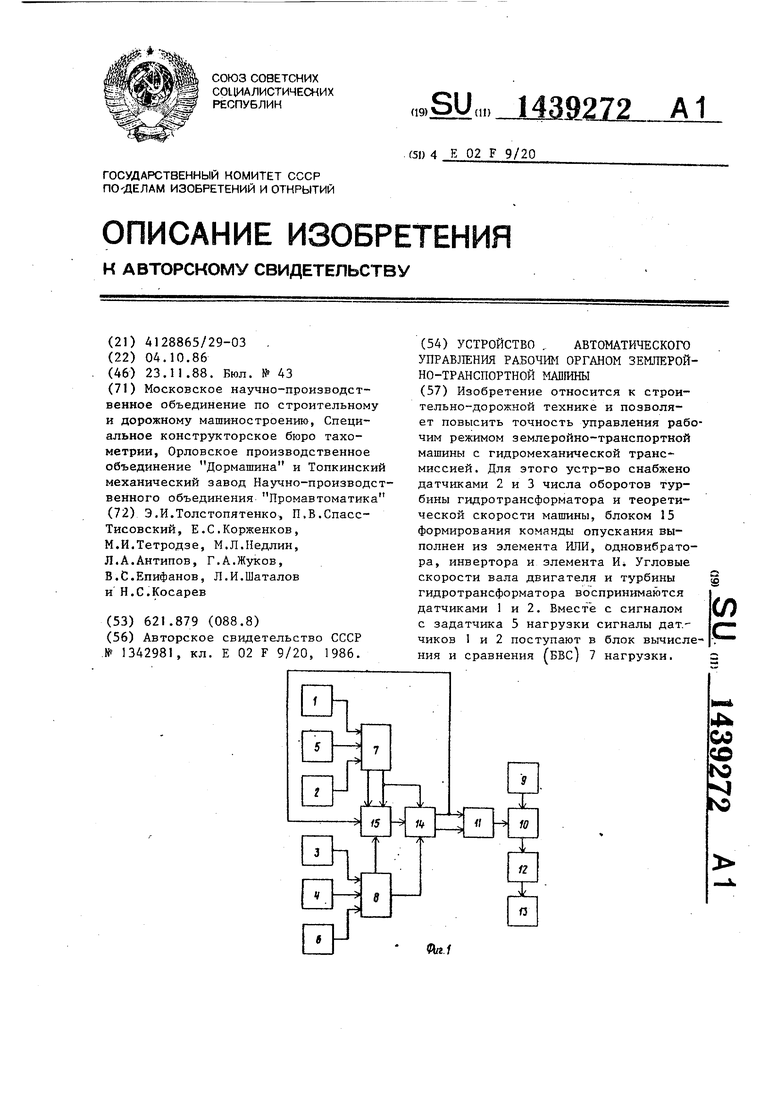
Изобретение относится к строительно-дорожному машиностроению и, в частности, к устройствам автоматического управления рабочим органом . землеройно -транспортной машины.
Цель изобретения - повьшение точности управления рабочим режимом зем леройно-транспортной машины с гидромеханической трансмиссией.
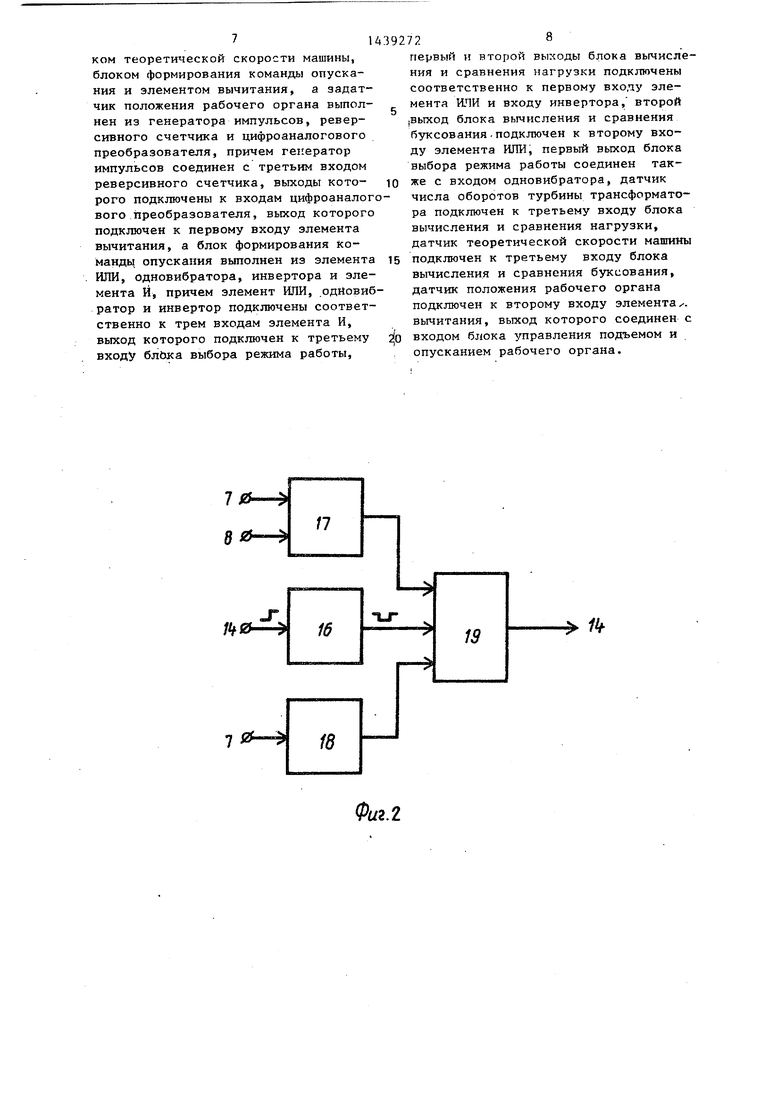
На фиг,1 изображена блок-схема устройства для автоматического управления рабочим органом землерой- но-транспортной машины; на фиг.2 - функциональная схема блока формирова ния команды опускания; на фиг.З - функциональная схема блоков вычисления и сравнения нагрузки и буксования; на фиг.4 - функциональная схема задатчика положения рабочего органа.
Устройство содержит датчики числа оборотов двигателя 1 и турбины гидротрансформатора 2, теоретической 3 и действительной 4 скоростей машины. Все датчики - бесконтактные, содержа унифицированный индуктивный чувствительный элемент и установлены в соответствующих узлах машиныг датчик 1 числа оборотов двигателя установлен в трансмиссии между валом двигателя и входом гидротрансформатора, датчик 2 числа оборотов турбины гидротрансформатора установлен в трансмиссии между выходом гидротрансформаторе и коробкой передач, датчик 3 тео- ретической скорости машины установлен в трансмисии между выходом коробки передач и ведущим колесом машины, датчик 4 действительной скорости
g
0
5 0
35
5
0
машины установлен в приводе ведомого .колеса.
В случае использования устройства на машине со всеми ведущими колесами применяется датчик действительной скорости локационного типа.
Задатчики нагрузки 5 и буксования 6 .представляют собой переменные потенциометры. Датчики числа обортов двигателя 1 и турбины гидротрансформатора 2, а также задатчик 5 нагрузки соединены с входами блока 7 вычисления и сравнения нагрузки.
Датчики теоретической 3 и действительной 4 скоростей машины, а также задатчик 6 буксования соединены с входами блока 8 вычисления и сравнения буксования.
Датчик 9 положения рабочего органа представляет собой датчик хода штока гидроцилиндра подъема и опускания рабочего органа. Датчик 9 соединен с вторым входом элемента 10 вычитания, первый вход которого соединен с выходом задатчика 11 полоясё- ния рабочего органа, а выход через блок 12 управления подъемом и опусканием рабочего органа соединен с исполнительным механизмом 13. Первые и вторые входы задатчика 11 положения соответственно подключены к первому и второму выходам блока 14 выбора режима работы.
К первому, второму и третьему входам блока 14 подключены соответственно первый выход блока В, первый выход блока 7 и выход блока 15 формировання команды опускания, причем первый и второй выходы блока 7 соединены соответственно с первым и четвертым входами блока 15, к второму входу которого подключен второй выход блока 8, а к третьему входу - первый выход блока 14.
Блок 15 формирования команды опускания выполнен в виде одновиб- ратора 16, вход которого подключен к первому выходу блока 14, являющемуся первым входом задатчика 11, элемента ИЛИ 17, входы которого подключены к вторым выходам блоков 7 и 8, инвертора 18, вход которого подключен к первому выходу блок а 7, элемента И 19, выход которого подключен к третьему вкоду блока 14. При этом входы элемента И 19 соответственно соединены с выходами одновибратора 16, элемента ИЛИ 17 и инвертора 18.
Блок 7 вычисления и сравнения нагрузки вьшолнен в виде делителя 20, входы которого соединены с датчиком числа оборотов двигателя I и турбины гидротрансформатора 2,.источника 21 уставки единицы, последовательно соединенных элемента 22 вычитания, и корректора 23, а также элемента
24сравнения (нуль-органа), выходы которого являются выходами блока 7, один из входом элемента 24 соединен с задатчиком 5 нагрузки, а другой - с выходом корректора 23. При этом один иэ входов элемента 22 вычитания соединен с выходом делителя 20, а другой - с выходом источника 21 уставки- единицы.
I . ,
В целях унификации блок 8 вычисления и сравнения буксования может выполняться полностью идентичным блоку 7 .
Задатчик 11 положения рабочего органа выполнен в виде генератора
25импульсов и последовательно соединенных реверсивного счетчика 26 и цифроаналогового преобразователя (ЦАП) 27, причем выход последнего является выходом задатчика 11.
При этом первым и вторым входами задатчика 11 являются соответственно первый и второй входы реверсивного счетчика 26 (входы прямого и обратного счета), третий вход которо- го (вход синхронизации) соединен с выходом генератора 25 .
Устройство работает следующим образом.
Угловые скорости вала двигателя и турбины гидротрансформатора воспринимаются датчиками 1 и 2, которые преобразуют эти величины в аналоговые электрические сигналы. Вместе с сигналом задатчика 5 нагрузки сигна-;. лы датчиков 1 и 2 поступают в блок 7, где вычисляется показатель нагру- жения -.
15
S.NTЧ
0
5
где N - число оборотов турбины гидротрансформатора;число оборотов вала двигателя .
Кроме того, в блоке 7 сигналы вычисленного значения Оц корректируются и (уравниваются с заданным значением S JJ,
Если нагрузка находится в заданных пределах, т.е.
t
пределах, А t
.Ь
S - 9
где
30
;35-S.
ширина зоны нечувствительности, то на первом и втором выходах блока
7 отсутствзтот логические сигналы,
т.е. Х., О и Х.г 0.
Если нагрузка ниже заданной, т.е
л J4- 5 + :5 выходах блока
7 1-1меется комбинация, соответствующая команде опускания рабочего ор40
гана: Х, О и X
г г
Действительная и теоретическая скорости перемещения машины воспринимаются датчиками 3 и 4, которые преобразуют эти величины в аналого вые электрические сигналы. Вместе с сигналом задатчика 6 буксования, , сигналы датчиков 3 и 4 поступают в блок 8, где происходит полностью аналогичное осуществляемому в блоке 7
0: вычисление и сравнение коэффициента буксования (j- с заданным значением Oj., причём в этом случае задается ; ширина зоны нечувствительности
St(X,, и Хд сиг.налы соответственно
,L.f.
на первом и втором выходах блока о;.
Сигналы блоков 7 (X.j. т.1 8 (Xg,) поступают в блок. 15, где про исходит формирование команды,
5
5 -
опускания, в соответствии со следующим логическим выражением:
Y (Х,., V Хд,,, )-X,.,.S,y,
где Y - сигнал на выходе блока I5; S - сигнал на выходе одновибра- тора блока 15.
Одновибратор блока 15 запускается задним фронтом .сигнала Zf, поступающего с первого выхода блока 1Д (Sj), т.е. запуск происходит при переходе из состояния Z 1 (соответствует команде подъема рабочего органа) в состояние Z О.
Активным состоянием выхода одно- вибратора является состояние 8,5 О, так как он запрещает формирование команды опускания на время, равное . длительности импульса.
Если в блоке 15 отсутствует запрет, т.е. 8,5- - 1 ) то на его выходе формируется команда опускания рабочего органа Y 1, когда либо ка, либо б,уксование ниже заданного значения.
Выходные сигналы блоков 7,8 и 15 (X-J J , Хй, ,Y) поступают в блок 1Д выбора режима работы, где происходит формирование команд подъема Z, и опускания Z. рабочего органа, в соответствии со следующими логическими выражениями:
2f (X,., X8,)-S,4J
(Xg,- Y)V S
4
где S 4 сигнал на выходе одновибратора блока 14.
Одновибратор блока 14 запускается на заданное время при включении устройства, причем активным состоянием его выхода является состояние S,. - 1, при котором сигналы на выходах блока 14 соответствуют принудительному опусканию рабочего органа, т.е. Zt - О, Zg I. При S О на выходы блока 14 поступают команды Z и Z, сформированные логическими элементами этого блока.
Выходные сигналы блока 14. Z; и Z поступают на задатчик 11 положения, который вместе с датчиком 9 положения рабочего opranaj элементом 10 вычитания, блоком 12 управления подъемом-опусканием, исполнительным
механизмом 13 входит в контур положе- кия рабочего органа. В соответствии с командами и Z, поступающими на счетчик 26 задатчика 11, который синхронизируется импульсами генератора
25,может происходить при Z О, Z 2, I увеличение числа в счетчике
26,которое преобразуется ЦАП 27 в 10 ступенчато-нарастающий сигнал на выходе задатчика 11 , при Z, 1, Z. О уменьшение числа в счетчике 26, которое преобразуется ЦАП 27 в ступенчато-спадающий сигнал на выходе
15 задатч1 к.а 11; при Z О, Z б
число Б счетчике 26 постоянно и преобразуется ЦАП 27 в постоянный сиг- нал на выходе задатчика П.
20 В первом случае под действием блока 12, исполнительный механизм 13 приводится в состояние, при котором происходит опускание рабочего органа, во втором - осуществляется
25 подъем рабочего органа, в третьем - положение рабочего органа поддерживается неизменньм.
30
Формула изобретения tf
Устройство для автоматического управления рабочим органом землерой- но-транспортной машины, содержащее датчик числа оборотов двигателя и
задатчик нагрузки, подключенные к первому и второму входам 15лока вычисления и сравнения нагрузки, датчик действительной скорости машины и за датчик; буксования, подключенные к
первому и второму входам блока вычис- ;ления и сравнения буксования, первый выход которого соединен с первым входом блока выбора режима работы к второму входу которого подключен
первый вход блока вычисления и сравнения нагрузок, первый и второй выходы которого подключены соответственно к первому и второму входам задатчика положения рабочего органа, датчик положения рабочего органа, блок управления подъемом и опусканием рабочего органа, соединенный с испол- нительным механизмом, отличающееся тем, что, с целью повьшения точности управления рабочим режимом землеройно-транспортной машины с гидромеханической трансмиссией, оно снабжено датчиком числа оборотов турбины гидротрансформатора, датчи
ком теоретической скорости машины, блоком формирования команды опускания и элементом вычитания, а задат- чик положения рабочего органа выполнен из генератора импульсов, реверсивного счетчика и цифроаналогового преобразователя, причем генератор импульсов соединен с третьим входом реверсивного счетчика, выходы которого подключены к входам цифроаналогвого преобразователя, выход которого подключен к первому входу элемента вычитания, а блок формирования команды, опускания выполнен из элемента ИЛИ, одновибратора, инвертора и элемента И, причем элемент ИЛИ, одйовиб ратор и инвертор подключены соответственно к трем входам элемента И, выход которого подключен к третьему входу блЬка выбора режима работы.
7/0-
П
Щ&
16
10-
16
10
15ф
392728
первый и второй выходы блока вычисления и сравнения нагрузки подключены соответственно к первому входу элемента ИЛИ и входу инвертора, второй |Вьтход блока вычисления и сравнения буксования.подключен к второму входу элемента ИЛИ, первьА выход блока выбора режима работы соединен также с входом одновибратора, датчик числа оборотов турбины трансформатора подключен к третьему входу блока вычисления и сравнения нагрузки, датчик теоретической скорости машины подключен к третьему входу блока вычисления и сравнения буксования, датчик положения рабочего органа подключен к второму входу элементах. вычитания, выход которого соединен с входом блока управления подъемом и опусканием рабочего органа.
т-г
19
- /4
Фиг.г
/;j|2f-
2}itys10
21
22
f3
2«
f ;/5;/ ISflS
Физ.З
Фи.Ч
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
