со
QD
пает управляющий сигнал на перемеще- н ие РО в соответствии с величиной и знаком компенсируемого отклонения. Одновременно по командам с ПЭ 8 и 9, подаваемым в блок 6 корректора 16, осуществляется переключение коэффициента передачи ветви, образуемой интегратором 5 к блоком 6 Интегратор 3 и элемент 4 фop шpyют динамическое звено, которое фильтрует вибропомеху, поступающую на датчик 1 1 з,п„ ф-лыд 2 ил.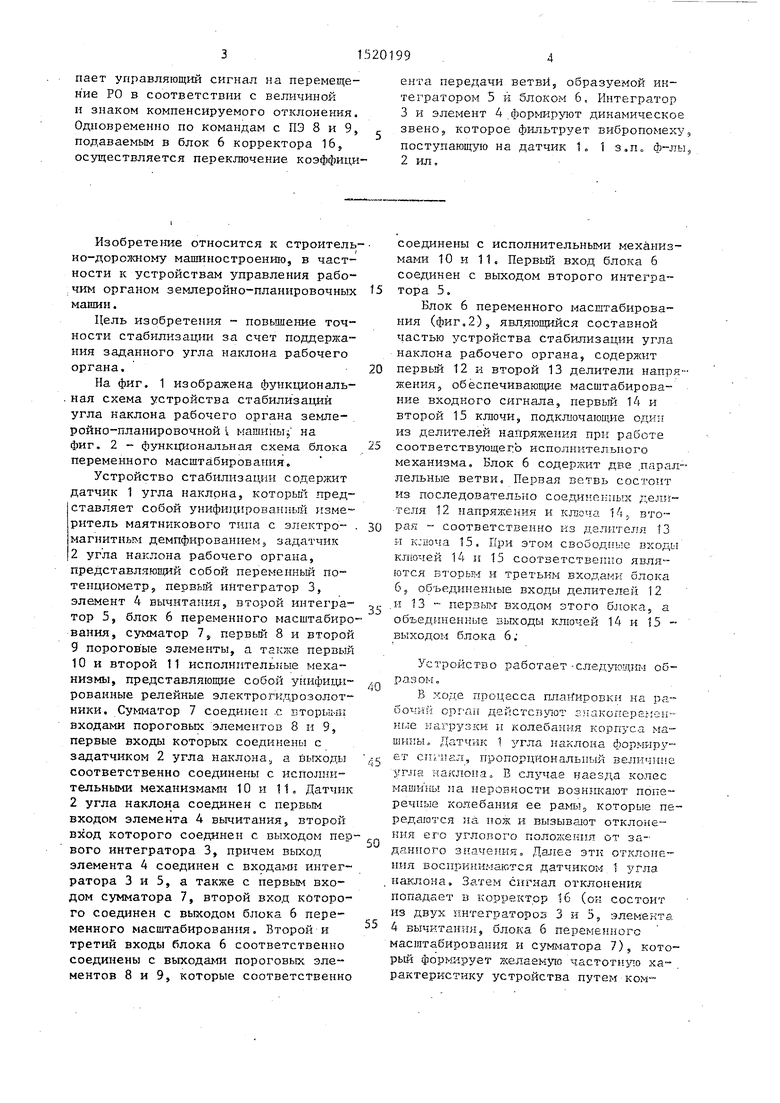
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Синхронно-синфазный электромагнитный вибропривод | 1980 |
|
SU964885A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Устройство для питания знакопеременным напряжением электрофильтра газоочистки | 1986 |
|
SU1556757A1 |
| Устройство для защиты трехфазного электродвигателя от перегрузки и обрыва фазы | 1987 |
|
SU1534608A1 |
| Устройство для автоматической стабилизации скорости шлифования | 1982 |
|
SU1046077A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1439272A1 |
| Устройство для управления режимом нагрева многозонной печи | 1983 |
|
SU1137452A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
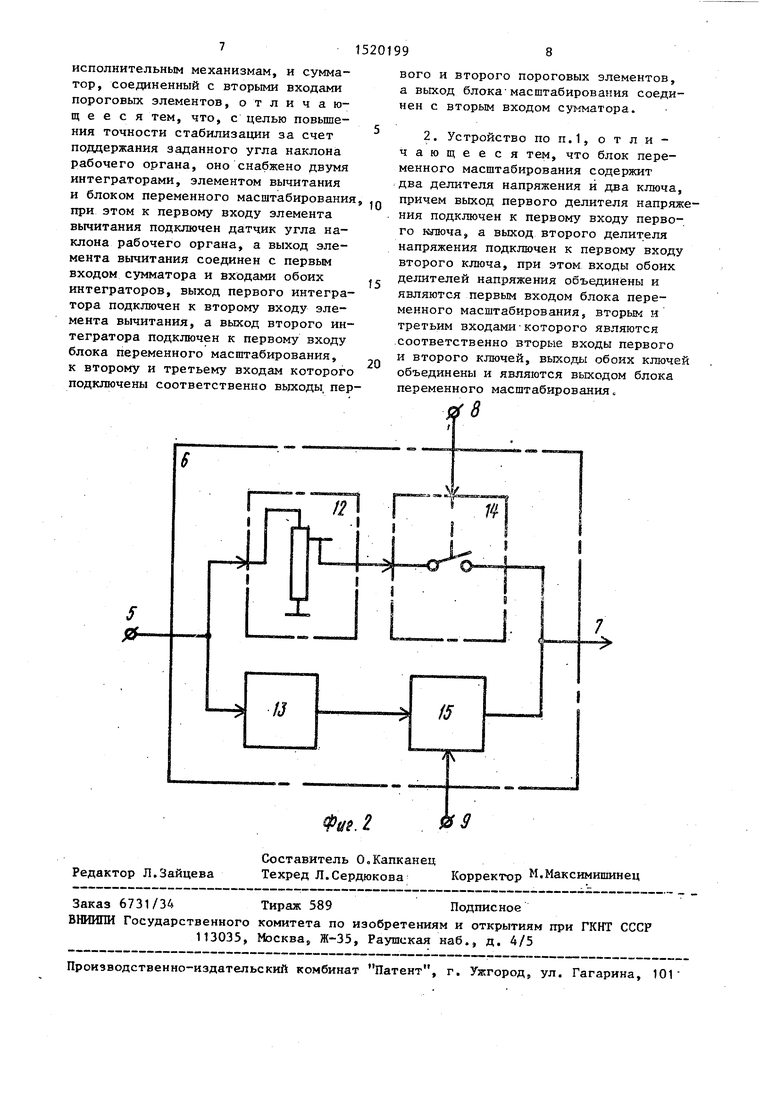
Изобретение относится к строительно-дорожному машиностроению и позволяет повысить точность стабилизации угла наклона рабочего органа (РО) землеройно-планировочной машины за счет поддержания его заданного угла. Устройство содержит датчик 1 и задатчик 2 угла наклона РО. Причем задатчик 2 непосредственно, а датчик 1 через корректор 16 подключены к входам пороговых элементов (ПЭ) 8 и 9. Выходы ПЭ 8 и 9 соединены с входами исполнительных элементов (ИЭ) 10 и 11 и с другими входами корректора 16. Последний содержит последовательно соединенные элемент 4 вычитания, интеграторы 3 и 5 и блок 6 переменного масштабирования, выход которого и выход элемента 4 вычитания подключены к входам сумматора 6, являющегося выходом корректора 16. Принцип действия устройства основан на симметрировании динамических характеристик ИЭ при перемещении РО по вертикали, которое происходит путем изменения постоянной времени Tгп корректора 16. При этом корректор 16 вносит в закон изменения упреждение на интервал времени Tгп+τ,гдЕ τ - время запаздывания. С выхода корректора 16 сигнал отклонения поступает на ПЭ 8 и 9, где сравнивается с сигналом заданного задатчиком 2 угла наклона РО. С выходов ПЭ 8 и 9 на ИЭ 10, 11 поступает управляющий сигнал на перемещение РО в соответствии с величиной и знаком компенсируемого отклонения. Одновременно по командам с ПЭ 8 и 9, подаваемым в блок 6 корректора 16, осуществляется переключение коэффициента передачи ветви, образуемой интегратором 5 и блоком 6. Интегратор 3 и элемент 4 формируют динамическое звено, которое фильтрует вибропомеху, поступающую на датчик 1. 1 з.п. ф-лы, 2 ил.
Изобретение относится к строитель- но-доролшому машиностроению, в частности к устройствам управления рабочим органом землеройно-планировочных машин.
Цель изобретения - повышение точности стабилизации за счет поддержания заданного угла наклона рабочего органа.
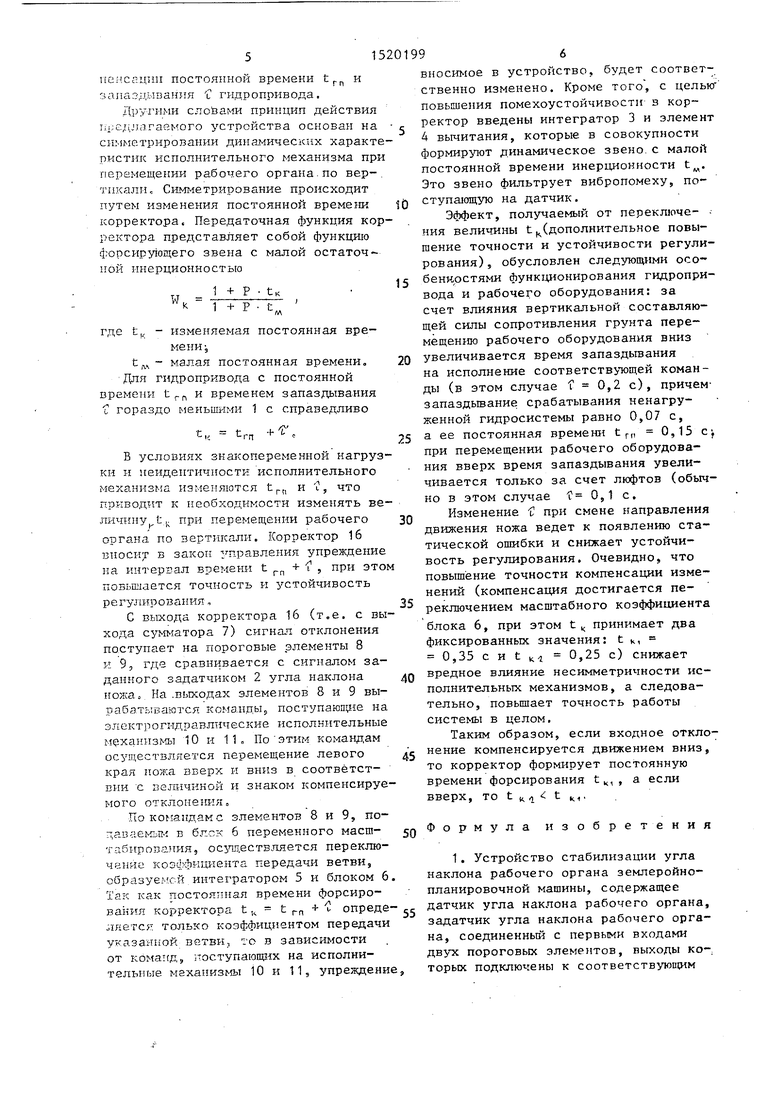
На фиг, 1 изображена функциональная схема устройства стабилизации угла наклона рабочего органа земле- . ройно-планировочной { машины, на фиг. 2 - функциональная схема блока переменного масштабирования.
Устройство стабилизации содер кит датчик 1 угла наклона, которьй представляет собой унифицированиш измеритель маятникового типа с электро- . магнитньм демпфированием, задатчик 2 угла наклона рабочего органа, представляющий собой переменньй по- тендиометр, первый интегратор 3, элемент 4 вычитания, второй интегратор 5, блок 6 переменного масштабирования, сумматор 75 первый 8 и второй
9пороговые элементы, а татслсе первый
10и второй 11 исполнительные механизмы, представляющие собой унифищх- рованные релейные электрогщдрозолот- ники. Cy шaтop 7 соединен .с вторьа-гп входами пороговых элементов 8 и 9, первые входы которых соединены с задатчиком 2 угла наклона,, а выходы соответственно соединены с исполнительными механизмаш-1 10 и 11, Датчик 2 угла наклола соединен с первым входом элемента 4 вычитания, второй вход которого соединен с выходом первого интегратора 3, причем вькод элемента 4 соединен с входаш интегратора 3 и 5, а также с первым входом сумматора 7, второй вход которого соединен с выходом блока 6 переменного масштабирования. Второй и третий входы блока 6 соответственно соединены с выходами пороговых элементов 8 и 9, которые соответственно
5
0
b
0
5
0
5
0
5
соединены с исполнительньми механизмами 10 и 11. Первый вход блока 6 соединен с выходом второго интегратора 5.
Блок 6 переменного масштабирования (фиг,2), являюшдйся составной частью устройства стабилизации угла наклона рабочего органа, содержит первый 12 и второй 13 делители напряжения, обеспечивающие масштабирование входного сигнала, первый 14 и второй 15 ключи, подключающие одкп из делителей напряжения при раС5оте соответствутощего исполнительного механизма. Блок 6 содержит две параллельные ветви. Первая ветвь состоит из последовательно соединеь пьж делн- теля 12 напряжения и клзоча 14, вторая -- соответственно из делителя 13 и ключа 15. При этом свобод. BXOADI ключей 14 и 15 соотзетствеппо являются вторьгм и третьим входами блока б, объединенные входы делителей 12 .и 13 - перзьм входом этого блока, а объединенные вьгходы ключей 14 и 15 - выходом блока 6 ,
Устройство работает-следующим образом,
В ходе процесса планировки на рабочий орг ап дейстсвуют знакопеременные нагрузки и колебания корпуса машины. Датчик 1 угла, наклона формирует ст Пегл, пропорциональный величине угла наклона. В случае наезда колес машины па неровности возникают поперечные колебания ее рамы, которые пе- редамтся на нож и вызывают отклонения его углового положения от за- значения. Далее эти ОТКЛОНЕНИЯ Босприяи.маются датчико 5 1 угла наклона. Затем сигнал отклоненик попадает в корректор 16 (он состоит из двух пнтегратороз 3 и 5, элемента 4 вычитания, блока б переменного масштабирования и сумг штора 7), кото- рьй формирует желаемую частотн- о характеристику устройства путем ком515
пеисацип постоянной времени t, и запаздывания С гидропривода.
Другими слоЬами принцип действия 1;1-:ед.лагаемого устройства основан на С11:.№ етрировании динамических характеристик исполнительного механизма при перемещении рабочего органа.по вер-. тикали. Сим1 1етрирование происходит путем изменения постоянной времени корректора. Передаточная функция корректора представляет собой функцию форсиру1о0№го звена с малой остаточной инерционностью
W - г + Р tK - т + р . t
m
где t,, - изменяемая постоянная времени 3
t,- малая постоянная времени, Для гидропривода с постоянной времени t и временем запаздывания 1 гораздо меньшими 1 с справедливо
t,, tr
+ -
- 25
В условиях зншсопеременной нагрузи иеидептичности исполнительного
механизг- а изменяются t,
и V, что
приводит к необходимости изменять величину t, при перемещении рабочего органа по вертикали. Корректор 16 Бноси;г в закон управления упреждение на интервал времени t + i , при этом повьш1ается точность и устойчивость регулирования,
С выхода корректора 16 (т.е. с выхода сумматора 7) сигнал отклонения поступает на пороговые элементы 8 и 9, где сравнивается с сигналом заданного задатчиком 2 угла наклона нолсао На .вь0:одах элементов 8 и 9 вырабатываются ко.андЫр поступаюпще на эпектрогидравлические исполнительные м -ханизмы 10 и 11. По этим команд.ам осуществляется перемещение левого края ножа вверх и вниз в соответствии с величиной и знаком компенсируемого отклонения.
По .гдaмс элементов 8 и 9, по- 1т,аваемьп-{ в блек 6 переменного масш- табиропаяия, .ествяяется переключение коэффициента передачи ветвиj образувг.гсй интегратором 5 и блоком 6. Так как постоянная времени форсирования корректора t , t г, + и опреде- о1кется только коэффициентом передачи указанной ветви, то в зависимости от команд, поступающих на исполнительные механизмы 10 и 11, упреждение
96
вносимое в устройство, будет соответственно изменено. Кроме того, с целью повышения помехоустойчивости в корректор введены интегратор 3 и элемент 4 вычитания, которые в совокупности формируют динамическое звено.с малой постоянной времени инерционности t. Это звено фильтрует вибропомеху, поступающую на датчик.
Эффект, получаемый от переключе- . ния величины t(дополнительное повышение точности и устойчивости регулирования), обусловлен следующими осо- бенярстями функ1.щонирования гидропривода и рабочего оборудования: за счет влияния вертикальной составляющей сршы сопротивления грунта перемещению рабочего оборудования вниз увеличивается время запаздьгаания на исполнение соответствующей команды (в этом случае f 0,2 с), причем- запаздьшание срабатывания ненагруженной гидросистемы равно 0,07 с, а ее постоянная времеш t п 0,15 су при перемещении рабочего оборудования вверх время запаздывания увеличивается только за счет люфтов (обычно в этом случае € 0,1 с.
Изменение f при смене направления движения ножа ведет к появлению статической ошибки и снижает устойчивость регулирования. Очевидно, что повышение точности компенсации изменений (компенсация достигается переключением масштабного коэффициента
блока 6, при этом t , принимает два фиксированных значения: t к, 0,35 с и t ц-г 0,25 с) снижает вредное влияние несимметричности исполнительных механизмов, а следовательно, повьшает точность работы системы в целом.
Таким образом, если входное отклонение компенсируется движением вниз, то корректор формирует постоянную времени форсирования t , , а если вверх, то t ц, t ,.
Формула изобретения
исполнительным механизмам, и сумматор, соединенный с вторыми входами пороговых элементов, о т л и ч а ю- щ е е с я тем, что, с целью повьше- ния точности стабилизации за счет поддержания заданного угла наклона рабочего органа, оно снабжено двумя интеграторами, элементом вычитания и блоком переменного масштабирования при этом к первому входу элемента вычитания подключен датчик угла наклона рабочего органа, а выход элемента вычитания соединен с первым входом сзгмматора и входами обоих интеграторов, выход первого интегратора подключен к второму входу элемента вычитания, а выход второго интегратора подключен к первому входу блока переменного масштабирования, к второму и третьему входам которого подключены соответственно выходы, пер12
5
ч
/J
вого и второго пороговых элементов, а выход блока-масштабирования соединен с вторым входом сумматора.
П
15
| Скловский А.А | |||
| Автоматизация дорожных машин | |||
| Рига, АВОТС, 1980, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Устройство стабилизации угла наклона рабочего органа планировочной машины | 1984 |
|
SU1167279A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
