времени интегрирования, причем первый вход схемы совпадения подключен к одному на выходов электронного блока данного регулятора, а второй - к одному из выходов электронного блока другого регулятора.
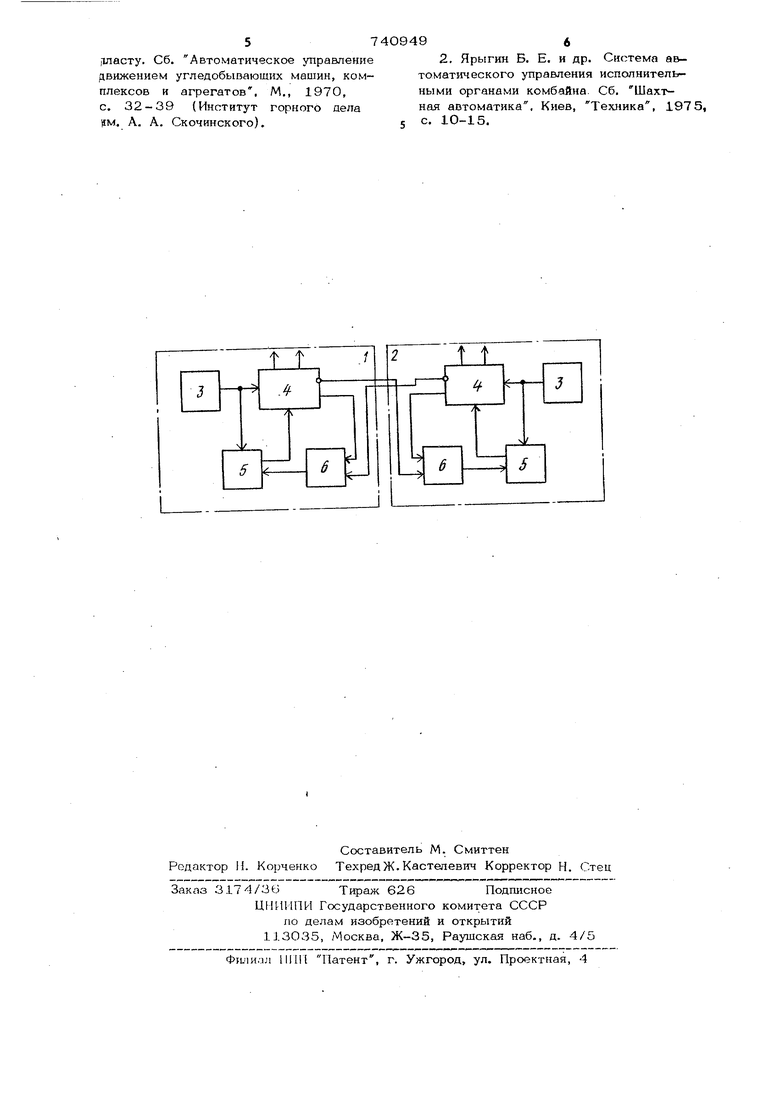
На чертеже представлена структурная схема предлагаемой системы управления.
Система автоматического управления содержит регуляторы 1 и 2 положения исполнительных органов комбайна относительно почвы и кровли пласта с датчиками 3 границы уголь-порода, электронными блоками 4, задатчиками 5 времени интегрирования исхемами совпадения 6.
Каждый регулятор в отдельности работает следующим образом.
От датчика 3 угол1 порода, например изотопного, сигналы поступают на электронный блок 4 к на задатчик 5 времени интегрирования.
Электронный блок 4 выполняет функции накопления информации, поступающей с датчика, дешифрации по заданным уставкам содержимого накопителя и формирования управляющих команд на подъем или опускание исполнительного органа.
Задатчик 5 времени интегрирования, выцолняет функции считывания и записи числа оборотов, исполнительного органа в двоичном трехразрядном счетчике; после накопления определенного числа оборотов задатчик разрешает выдачу сформированной в электронном блоке 4 управляющей команды с последующим обнулением (приведением в исходное состояние) как накопителя, так и собственно задатчика 5.
На выходе электронного блока 4 появляются управляющие команды на подъем-опускание исполнительных органо с постоянной времени, определяемой задатчиком 5 времени интегрирования. При совместной работе регуляторов 1 и 2 возможно совпадение во времени появления их управляющих команд.
Если на выходе, например регулятора 1 (почвы) сформирован управляющий сигнал, а на выходе регулятора 2 (кровли такой сигнал отсутствует, то на оба входа схемы совпадения 6 регуля.тора 1 подаются сигналы логической единицы. На выходе этой схемы также формируется сигнал логической единицы, обнуляющий три разряда счетчика задат- чика 5 времени интегрирования регулятора
Если в какой-то момент времени в одном из регуляторов, например 1 (почвы), появляется управляющий сигнал, а в другом регуляторе 2 (кровли) указанный сигнал уже отрабатывается, то с электронного блока 4 регулятора 2 на схему совпадения 6 регулятора 1 поступет сигнал логического нуля.
В таком случае на выходе схемы совпадения 6 регулятора, 1 формируется сигнал логического нуля, что не приводит к обнулению третьего разряда счетчика задатчика 5 времени интегрирования. Это значит, что следующий цикл регулирования данного регулятора, т.е. регулятора 1, будет короче на заданное количество оборотов исполнительного органа, а начала всех последующих циклов этого регулятора будут смещены на такое же число оборотов относительно начал циклов регулирования регулятора 2.
Таким образом, управляющие команды обоих регуляторов будут формироваться с интервалом по времени.
Система автоматического управления упрощается без снижегшя ее быстродействия, что позволяет повысить Не только точность управления, но и производительность очистного комбайна.
Формула изобретения
Система автоматического управления исполнительными органами очистного комбайна в профиле пласта, содержащая регуляторы положения исполнительных органов относительно почвы и кровли пласта с датчиками границы уголь-порода, электронными блоками и задатчиками времени интегрирования, отли чающаяся тем, что, с целью повыщения точности управления, каждый регулятор системы снабжен схемой совпадения, подключенной к входу задатчика времени интегрирования, причем первый вход схемы совпадения подключен к одному из выходов электронного блока данного регулятора, а второй - к одному из выходов электронного блока другого регулятора.
Источники информации, принятые во внимание при экспертизе
1. Рудановский А. А. и др. О выборе блок-схемы регулятора для автоматического вождения угледобывающих машин no
jinacTy. Сб. Автоматическое управление движением угледобывающих машин, комплексов и агрегатов , М,, 1970, с. 32-39 (Институт горного дела SM. А. А. Скочинского).
2. Ярыгин Б. Е. и др. Система автоматического управления исполнительными органами комбайна. Сб. Шахтная автоматика, Киев, Техника, 1975, с. 10-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор положений исполнительного органа горной машины | 1983 |
|
SU1141192A1 |
| Устройство автоматического управления угледобывающей машиной в профиле пласта | 1978 |
|
SU964138A2 |
| Способ автоматического управления комбайном и устройство для его осуществления | 1982 |
|
SU1084441A1 |
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1977 |
|
SU899933A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ УГЛЕДОБЫВАЮЩИХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2130546C1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949175A2 |
| Способ контроля границы уголь-порода | 1980 |
|
SU933992A1 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1974 |
|
SU779577A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
