фиа/
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе с фазовой автоподстройкой частоты вра- щения в системах.передачи и воспроизведенных информации, например в приводе устройств видеозаписи.
Цель изобретения - улучшение динамических характеристик электропри- вода.
На фиг. 1 изображена схема предлагаемого электропривода; на фиг. 2 - временные диаграммы, поясняющие работу электропривода.
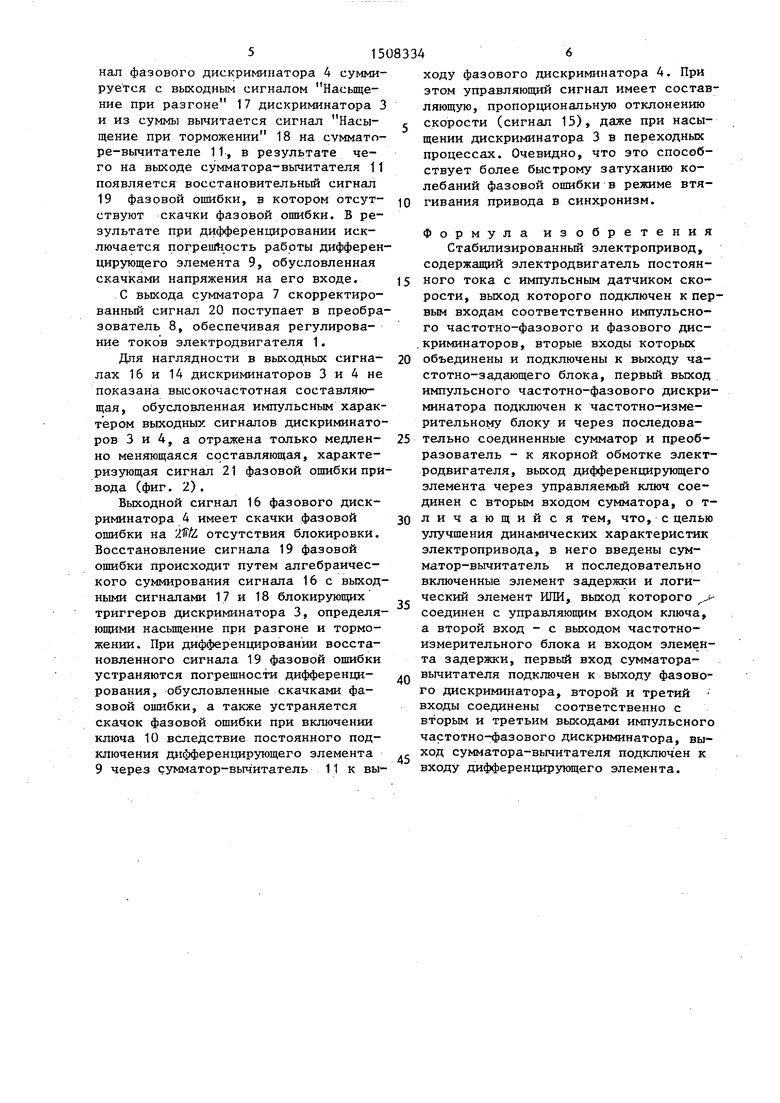
Электропривод содержит электропви- татель 1 постоянного тока с импульс- ным датчиком 2 скорости, выход кото- рого подключен к первым входам соответственно импульсного частотно-фазоjBoro 3 и фазового 4 дискриминаторов. Вторые входы дискриминаторов 3 и 4 объединены и подключены к выходу частотно-задающего блока 5. Первый выход импульсного частотно-фазового дискриминатора 3 подключен к частотно-измерительному блоку 6 и через последовательно соединенные сумматоры 7 и преобразователь 8 - к якорной цепи электродвигателя 1. Выход диффе|ренцирующего элемента 9 через управ- ляемый ключ 10 соединен со вторым входом сумматора 7. Кроме того, электропривод содержит сумматор-вычита- ,тель 11 и последовательно включенные элемент 12 задержки и логический эле- :Мент ИЛИ 13, выход которого соединен с управляющим входом ключа 10. Второй вход логического элемента 1ШИ 13 подключен к выходу частотно-изме- рительного блока 6 и входу элемента 12 задержки. Первый вход сумматора- вычитателя 11 подключен к выходу фа- isoBoro дискриминатора 4. Второй и третий входы сумматора-вычитателя 11 со единены соответственно со вторым и третьим выхода ш импульсного частотно-фазового дискриминатора 3. Выход сумматора-вычитателя 11 подключен к входу дифференцирующего элемента 9.
Электропривод работает следующим образом.
При включении питания электродвигатель 1 разгоняется до частоты вращения, при которой частоты частотно- задающего блока 5 и импульсного датчика 2 скорости равны. При этом дискриминатор 3 находится в насьщении, что, вследствие гистерезиса его ди5
0
5
0 0 . 5 0 5о
намической характеристики, приводит к дальнейшему разгону электродвигателя 1 до тех пор, пока не наступит благоприятное фазовое положение импульсов сравниваемых частотных последовательностей (появление двух импульсов одной последовательности между двумя импульсами другой последовательности) . С этого момента времени начинается линейньш режим работы дискриминатора 3. На выходе дискриминатора 3 появляется импульсный сигнал 14, по которому частотно-измеритель- ньй блок 6, выполняющий роль индикатора синхронизации, сформирует сигнал, которьш через элемент ИЛИ 13 поступает на управляющий вход ключа 10, обеспечивая подключение выхода дифференцирующего элемента 9 к входу сумматора 7. Для исключения пропада-г ния корректирующего сигнала 15 (в моменты повторных заходов дискриминатора 3 в области насьщения) выходной сигнал частотно-измерительного блока 6 задерживается с помощью элемента 12 задержки на время TO определяющее действие коррекции в режиме насыщения, и через элемент ИЛИ 13 поступает на управляющий вход ключа 10. Таким образом, отключение корректирующего сигнала 15 происходит только при смене частотно-задающим блоком 5 уставки опорной частоты, когда дискриминатор 3 будет находиться в насыщении (время насыщения - время,превышающее .Т ) .Следовательно, в режимах втягивания в синхронизм и в пропорциональном в сумматоре 7 происходит суммирование сигнала 14 фазовой ошибки с выхода дискриминатора 3 и коррек тирующего сигнала 15 с выхода дифференцирующего элемента 9, пропорционального ошибке по частоте вращения. Вследствие отсутствия блокировки на выходе фазового дискриминатора 4 всегда присутствует сигнал 16 фазовой ошибки, в результате чего корректи- рующий сигнал формируется непрерывно на выходе дифференцирующего элемента 9.
Б режиме втягивания в синхронизм амплитуда колебаний фазовой ошибки может превьшать величину 2Ш. В результате в выходном сигнале фазового дискриминатора 4 имеются скачки фазовой ошибки на 2f/Z , которые ухудшают работу дифференцирующего элемента 9. Для их устранения выходной сигнал фазового дискриминатора 4 суммируется с выходным сигналом Насьще- ние при разгоне 17 дискриминатора 3 и из суммы вычитается сигнал Насыщение при торможении 18 на суммато- ре-вычитателе 11, в результате чего на выходе сумматора-вычитателя 11 появляется восстановительный сигнал 19 фазовой ошибки, в котором отсутствуют скачки фазовой ошибки. В результате при дифференцировании исключается погрешность работы дифферен цирзпощего элемента 9, обусловленная скачками напряжения на его входе.
С выхода сумматора 7 скорректиро- ванньм сигнал 20 поступает в преобразователь 8, обеспечивая регулирование токо в электродвигателя 1.
Для наглядности в выходньк сигналах 16 и 14 дискриминаторов 3 и 4 не показана высокочастотная составляю щая, обусловленная импульсным характером выходных сигналов дискриминаторов 3 и 4, а отражена только медленно меняющаяся составляющая, характеризующая сигнал 21 фазовой ошибки привода (фиг. 2).
Выходной сигнал 16 фазового дискриминатора 4 имеет скачки фазовой ошибки на 21Г& отсутствия блокировки. Восстановление сигнала 19 фазовой ошибки происходит путем алгебраического суммирования сигнала 16 с выходными сигналами 17 и 18 блокирующих триггеров дискриминатора 3, определяющими насьш ение при разгоне и торможении. При дифференцировании восстановленного сигнала 19 фазовой ошибки устраняются погрешности дифференцирования, обусловленные скачками фазовой ошибки, а также устраняется скачок фазовой ошибки при включении ключа 10 вследствие постоянного подключения дифференцирующего элемента 9 через сумматор-вьгчитатель 11 к выходу фазового дискриминатора 4. При этом управляющий сигнал имеет составляющую, пропорциональную отклонению скорости (сигнал 15), даже при насыщении дискриминатора 3 в переходных процессах. Очевидно, что это способствует более быстрому затуханию колебаний фазовой ошибки в режиме втя- 0 гивания привода в синхронизм.
Формула изобретения
Стабилизированный электропривод, содержащий электродвигатель постоян5 ного тока с импульсным датчиком скорости, выход которого подключен к первым входам соответственно импульсного частотно-фазового и фазового дис- .криминаторов, вторые входы которых
0 объединены и подключены к выходу частотно-задающего блока, первый выход импульсного частотно-фазового дискриминатора подключен к частотно-измерительному блоку и через последова5 тельно соединенные сумматор и преобразователь - к якорной обмотке электродвигателя, выход дифференцирующего элемента через управляемый ключ соединен с вторым входом сумматора, о т0 личающийся тем, что, с целью улучшения динамических характеристик электропривода, в него введены сум- матор-вычитатель и последовательно включенные элемент задержки и логи- ческий элемент ИЛИ, выход которого - соединен с управляющим входом ключа, а второй вход - с выходом частотно- измерительного блока и входом элемента задержки, первый вход сумматораQ вычитателя подключен к выходу фазового дискриминатора, второй и третий входы соединены соответственно с вторым и третьим выходами импульсного частотно-фазового дискриминатора, вы45
ход сумматора-вычитателя подключен к входу дифференцирующего элемента.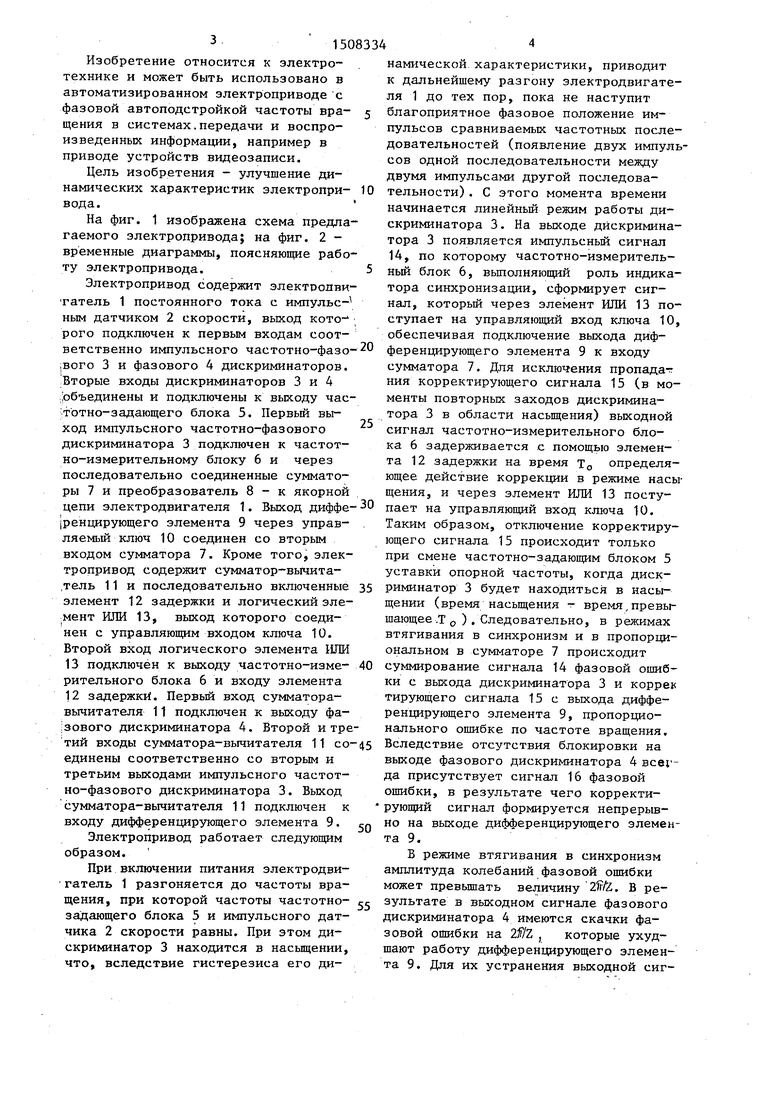
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Стабилизированный электропривод | 1985 |
|
SU1302411A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2585241C1 |
| Устройство для управления многодвигательным электроприводом | 1984 |
|
SU1220098A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1989 |
|
SU1612368A1 |
| Электропривод переменного тока | 1987 |
|
SU1439728A2 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| Устройство для управления статическим преобразователем частоты | 1982 |
|
SU1125731A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе с фазовой автоподстройкой частоты вращения в системах передачи и воспроизведения информации, например в приводе устройств видеозаписи. Цель изобретения - улучшение динамических характеристик электропривода. При включении питания двигатель 1 разгоняется до частоты вращения, при которой частоты задающего блока 5 и импульсного датчика скорости 2 равны. При этом дискриминатор 3 находится в насыщении, двигатель 1 разгоняется до наступления благоприятного фазового расположения частотных последовательностей. Для исключения пропадания корректирующего сигнала в моменты повторных заходов дискриминатора 3 в области насыщения выходной сигнал частотно-измерительного блока 6 задерживается с помощью элемента задержки 12. Следовательно, в режиме втягивания в синхронизм и в пропорциональном в сумматоре 7 происходит сложение сигнала фазовой ошибки с выхода дискриминатора 3 и с выхода дифференцирующего элемента 9. С выхода сумматора 7 скорректированный сигнал через преобразователь 8 поступает на двигатель 1. Улучшение динамических характеристик достигается устранением скачков фазовой ошибки. 2 ил.
| Трахтенберг P.M | |||
| Импульсные астатические системы электропривода с дискретным управлением | |||
| М.: Энерго- издат, 1982, с.38 | |||
| Стабилизированный электропривод | 1985 |
|
SU1302411A1 |
