IS
S3 tS
(Л
Устройство,состоит из штангообраз- ного датчика направления 1 движения, электронного блока 6, электрогидро- распределителя 20, датчика 21 угла поворота колес, исполнительного гидроцилиндра 22, передних колес 23, 24 машины, и стабилизированного источника напряжения 25. Датчик направления 1 движения закреплен на передней части машины и выполнен в виде цилиндра, внутри которого установлен симметрично относительно центра две группы чувствительных элементов 2. КаждмИ элемент. 2 состоит из Н-образ- ного магнитопровода 3, приемной обмотки 4 и питающих обмоток 5, Электронный блок 6 состоит из двух групп усилителей 7,8, двух групп триггеров 9,10, генератора 11 тактовых импульсов с низкочастотным и высокочастотным выходами, двух цифроаналоговых преобразователей 12, 13, двух схем совпадения 16, 17 и двух усилителей мощности 18,19. Приемные обмотки 4 первой и дторЪй групп чувствительных элементов 2 через цепочку электронного блока 6 имеют электрическую
связь с электромагнитами электрогид- рораспределителя 20. При движении машины вдоль кромки стеблестоя сигнал на входах первого и второго электромагнитов электрогидрораспредели- теля 20 отсутствует, в результате электрогидрораспределитель 20 находится в нейтральном положении, и машина движется прямолинейно. Если кромка стеблестоя сместится по отношению к геометрической середине датчика направления 1, под действием генератора 11 часть триггеров перей- . дет в единичное состояние, и в схеме совпадения 17 происходит заполнение полученных импульсов более короткими, поступающими с высокочастотного выхода генератора 11 тактовых импульсов. Усиленные усилителем мощности 19 импульсы прикладываются к электромагниту электрогидрораспределителя 20, в результате чего гидроцилиндр 22 рулевого управления поворачивает колеса на угол, пропорциональный величине управляющего сигнала. 1 з.п. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и регулировки положения очесывающего барабана льноуборочного комбайна | 1990 |
|
SU1821066A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ | 1971 |
|
SU322142A1 |
| Преобразователь код-напряжение с широтноимпульсной модуляцией | 1978 |
|
SU790283A1 |
| Система автоматического вождения сельскохозяйственного агрегата по заданной траектории | 1991 |
|
SU1817958A1 |
| Устройство для управления реверсивным широтно-импульсным преобразователем | 1974 |
|
SU535711A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1654973A1 |
| Устройство для цифровой индикации многоканального регулятора температуры | 1983 |
|
SU1211709A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для автоматического вождения вдоль стеблестоя зерновых культур, вдоль рядков листо- стебельных культур при междурядной обработке и уборке урожая. Цель изо- бретения - повьппение надежности и точности автоматического вождения.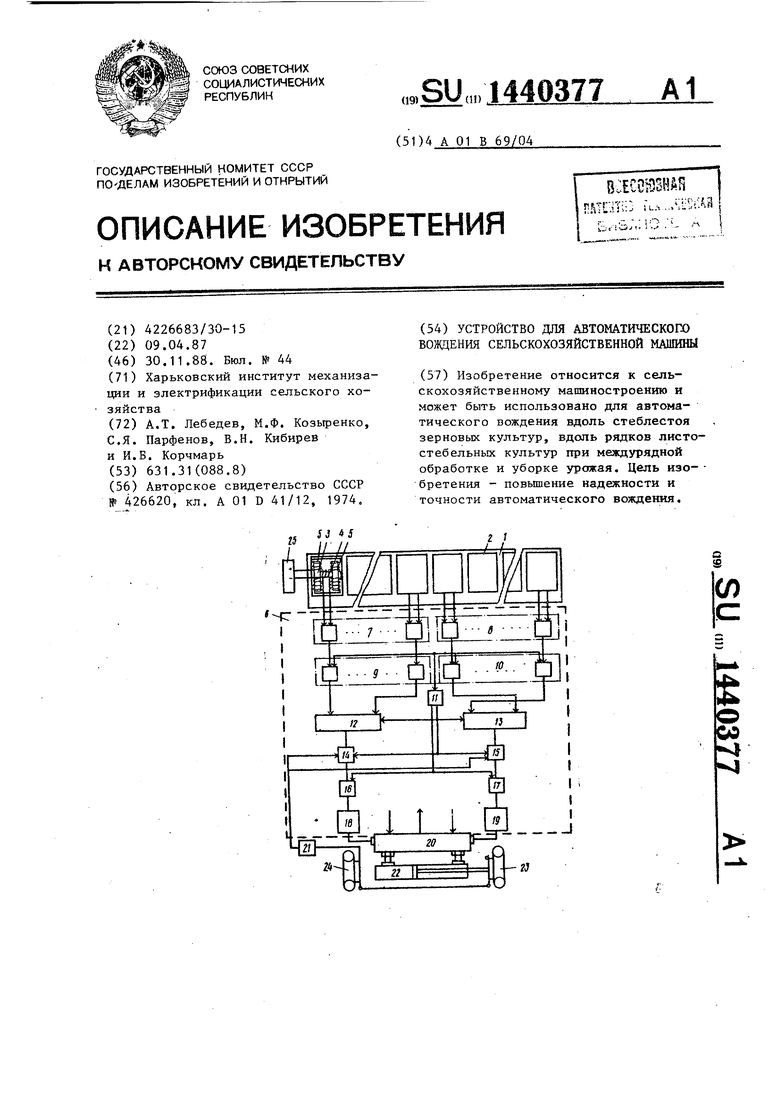
1
Изобретение относится к сельскохозяйственному машиностроению, а име но к устройствам для автоматического вождения самоходных сельскохозяйственных машин, и может быть исполь- зовано, например, для автоматическог вождения сельскохозяйственных машин, вдоль стеблестоя зерновых культур, вдоль рядков листостебельных культур при междурядной обработке, убор- ке урожая.
Целью изобретения является повышение надежности и точности автоматического вождения путем повышения чувствительности датчика направления движения и построения электронного блока управления с раздельной обработкой информации и выработкой управляющего воздействия для поворота ко- лес вправо и влево.
На чертеже изображена схема устройства.
Устройство состоит из штангооб- разного датчика 1 направления движения, который закреплен слева на передней части сельскохозяйственной машины (комбайна) над кромкой траво-сте- блестоя под углом к направлению движения. Внутри датчика 1 установлены симметрично относительно центра две группы чувствительных элементов 2, каждый из которых состоит из Н-об- разного магнитопровода 3 с регулирующей ферромагнитной пластиной, приемной обмотки 4 и питающих обмоток 5 Электронный блок 6 управления устройства состоит из двух групп усилителей 7 и 8, двух групп триггеров 9 и 10, генератора 11 тактовых импульсов с низкочастотным и высокочастотным выходами, двух цифроаналоговых преобразователей 12 и 13, двух широтно- импульсных преобразователей 14 и 15, двух схем 16 и 17 соипадения, двух усилителей 18 и 19 мощности.
14
Устройство включает также эле.ктро- гидрораспределитель 20, 21 угла поворота колес, ис11олнитель} ый гидроцилиндр 22, передине колеса 23 и 24 машины и стабилизированный источник 25 напряжения. Приемные обмотки 4 первой группы чувствительных элементов 2 датчика 1 TdMSioT электрическую связь с входами группы усилителей 8, выходы которых подстыкованы к соответствующим единичным входам группы триггеров 10. Выходы группы триггеров 10 соединены с входом цифроакалогового преобразователя 13, а его выходы подключены к входу ши ротно-импульсного преобразователя 15. Выход преобразователя 15 электрически связан с входом схемы 17 совпадения, а ее выход подключен к входу усилителя 19 мощности, выход которого соединен с первым элекз ро- магнитом электрогидрораспределителя 20. Связь электрогидрораспределителя 20 с исполнительным гидроцилиндром . 22 поворота колес 23 и 24 гидравлическая. Электрическая связь приемной обмотки 4 второй группы чувствительных элементов 2 с входящими устройствами поворота колес 23 и 24 аналогична и представляется следующей схемой. Приемные обмотки 4 второй группы чувствительных элементов 2 датчика 1 имеют электрическую связь с входами группы усилителей 7, выходы которьк подстыкованы к соответствующим нулевым входам группы триггеров 9. Выходы триггеров 9 соедине- нь с входом цифроаналогового преобра- .зователя 12, а его выходы подключены к входу широтно-импульсного преобразователя 14. Выход преобразователя 14 электрически связан с входом схемы 16 совпадения, а ее выход подключай к входу усилителя 18 мощности, выход которого соединен с вторым электромагнитом электрогидрораспре- делителя 20,
Низкочастотные выходы генератора 11 тактовых импульсов подключены к соответстзующим нулевым входам группы 9 vi к единичным входам группы триггеров 10, цифроакалого- вым преобразователям 12 и 13, широт- но-импульсным преобразователям 14 и 15, а высокочастотные выходы генератора тактовых импульсов подключены к соответствую1дим входам схем 16 и 17 совпадения. Датчик 21 угла по
ГЗ
10
20
25
14
порота колес 23 и 24 машины представляет собой поворотный трансформатор, его соединены с соответствующими вxoдa н широтно-импульсных преобразователей 14 и 15.
Устройство работает следую1цим образом:
Функционирование устройства рассматривается с момента, когда сельскохозяйственная машина (комбайн) начинает движение вдоль кромки стеблестоя. В этом положении первая группа чувствительных элементов 2 датчи- 15 ка 1 находится над растениями (возможен контакт с растениями), вторая группа чувствительных элементов 2 находится в зоне, где нет растений. Своим присутствием растения уменьшают магнитную проницаемость среды Д 1 в чувствительных элементах 2 первой группы, при этом результирующий поток максимален, и в приемных обмотках 4 создается ЭДС, которая усиливается соответствующими усили- 8. Усиленный сигнал поступает на единичные входы соответствую- ШJix триггеров 10, которые под действием входного сигнала переводятся в нулевое состояние. На входе цифро- аналогового преобразователя 13, как и ь последующей цепочке блоков 15, 17, 19 и 20, сигнал отсутствует. Во второй группе чувствительных элементов датчика магнитная проницаемость среды/i 1 и результир тощий поток равен нулю. В приемной катушке 4 ЭДС не создается и на вторую группу усилителей 7 и триггеров 9 сигнал не по- ст гпает. Группа триггеров 9 под действием генератора 11 тактовых импульсов переведена в нулевое состояние, В последующей цепочке блоков 12,14, 16, 18 и 20 сигнал отсутствует. В такой ситуации злектрогидрораспре- делитель 20 находится в нейтральном положении и сельскохозяйственная ма - шша движется прямолинейно. Если кромка стеблестоя сместится по отношению к геометрической середине датчика 1 направления, например, вправо, часть чувствительных элементов первой группы датчика потеряет контакт с растениями, в их зоне магнитная проницаемость среды . 1 и в их приемных катушках 4 ЭДС не будет создаваться и, соответственно, не будет сигнала на входах части соответствующих усилителей 8 и триггеров 10.Под
30
35
40
45
50
действием тактового генератора 11 часть триггером 10 перейдет в единичное состояние. На цифроаналого- вый преобразователь 13 поступит кодовый цифровой сигнал, пропоргщональ ный числу чувствительных элементов 2, потерявших контакт с растениями. С выхода цифроаналогового преобразователя 13 на широтно-импульсный преобразователь 15 поступает аналоговый сигнал, который преобразуется в импульсы, длительность которых про„порциональна величине аналогового сигнала. Далее в схеме 17 совпадения происходит заполнение полученных импульсов более короткими, которые поступают с высокочастотного выхода
.генератора 11 тактовых импульсов. В усилителе 19 мощности импульсы усиливаются, и полученное напряжение прикладывается к первому электромагниту электрогидрораспределителя 20. Электромагнит перемещает шток распределителя 20, открьшая доступ гидравлической жидкости в полость исполнительного гидроцилиндра 22 рулевого управления, которое поворачивает колеса вправо на угол, пропорциональный величине управляющего сигнала, который, в свою очередь, пропорцио-i нален числу чувствительных элементов, потерявших контакт с растениями, или величине смещения комбййна от бровки стеблестоя. Датчик 21 угла поворота является отрицательной обратной связью для ликвидации автоколебаний и уменьшения перерегулирования. Сигнал с датчика 21, пропорциональный углу поворота колес, вычитается
;С аналогового сигнала, поступакяцего в широтно-импульсный преобразователь 15. Если кромка стеблестоя сместится, например, влево, то часть чувствительных элементов второй грзгапы датчика 1 войдет в контакт с растениями и магнитная проницаемость среды в их зоне уменьшится (JH 1) , баланс магнитного моста нарушится, на приемных катущках создается ЭДС, усилится в усилителях 9 и, поступая на вхо триггеров 9, переведет их из нулевого положения в единичное. Далее формирование управляющего сигнала происходит по аналогии с формированием сигнала для поворота вправо по цепочке: цифроаналоговый преобразова- тель 12, широтно-импульсный преобразователь 14, схема 16 совпадения.
ь- оIAA03776
усилитель 18 мощности, второй электромагнит электрогидрораспределителя 20, гидроцилиндр 22. В результате комбайн совершает поворот влево, в сторону уменьшения ошибки вождения.
0
5
0
Формула изобретения 1. Устройство для автоматического вождения . сельскохозяйственной машины, содержащее датчик направления движения, 1-1меющий стержнеобразный корпус с группами чувствительных элементов, отличающееся тем, что, с целью повьш1ения надежности и увеличения точности автоматического вождения, оно снабжено электронным блоком управления, состоящим из двух групп усилителей и триггеров, количество которых в группе соответствует числу групп чувствительных элементов в датчике генератора так- .товых импульсов, двух цифроаналоговых 5 преобразователей,двух широтно-импуль- сных преобразователей, двух схем совпадения,двух усилителей мощности, трех- позиционного электрогидрораспределителя, а также датчиком угла пово- 0 рота колес, причем приемные обмотки движения каждой из групп чувствительных элементов датчика направления имеют электрическую связь с входами соответствующих групп усилителей, выходы одной группы усилителей соедине- не с соответствующими единичными входами первой группы триггеров, а выходы второй группы усилителей подключены к соответствующим нулевым входам триггеров второй группы, выходы каждой из групп триггеров электрически связаны с входами соответствующих цифроаналоговых преобразователей, выходы которых соединены с входом со- ответствукнцего широтно-импульсного преобразователя и выходы последнего подключены к входам схем совпадения, а их выходы соединены с входами со- ответствукнцих усилителей мощности, выходы которых электрически связаны с соответствующими электромагнитами электрогидрораспределителя, причем выходы генератора тактовых импульсов имеют связь с соответствующими входами цифроаналоговмх преобразователей и схем совпадения, при этом выход датчика угла поворота колес подключен к соответствующим входам широтно- импульсных модуляторов.
5
0
5
0
5
14403778
| ДАТЧИК ПОЛОЖЕНИЯ БРОВКИ ХЛЕБА ДЛЯ САМОХОДНОГО ЗЕРНОУБОРОЧНОГО КОЛ1БАЙНА | 1971 |
|
SU426620A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
