Изобретение относится к сельхозмашиностроению, в частности к устройствам для посадки расссады овощных культур.
Л1,елью изобретения является снижение утомляемости оператора путем увеличения рабочей поверхности питающего устройства. 5
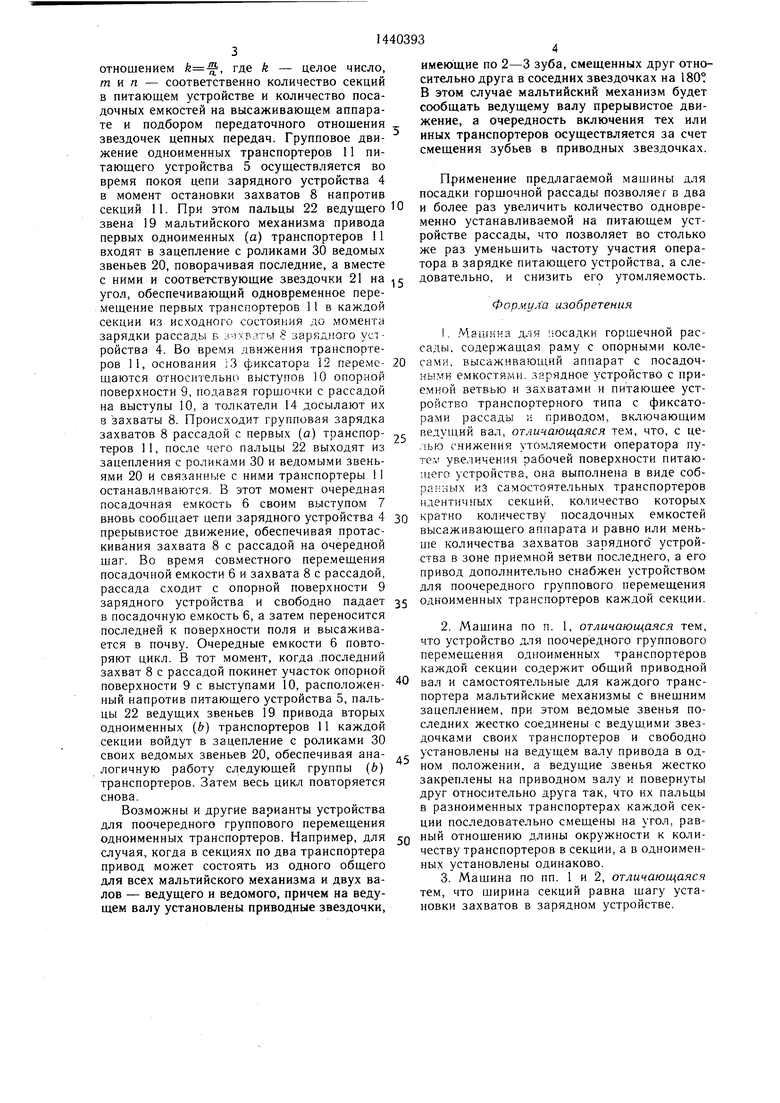
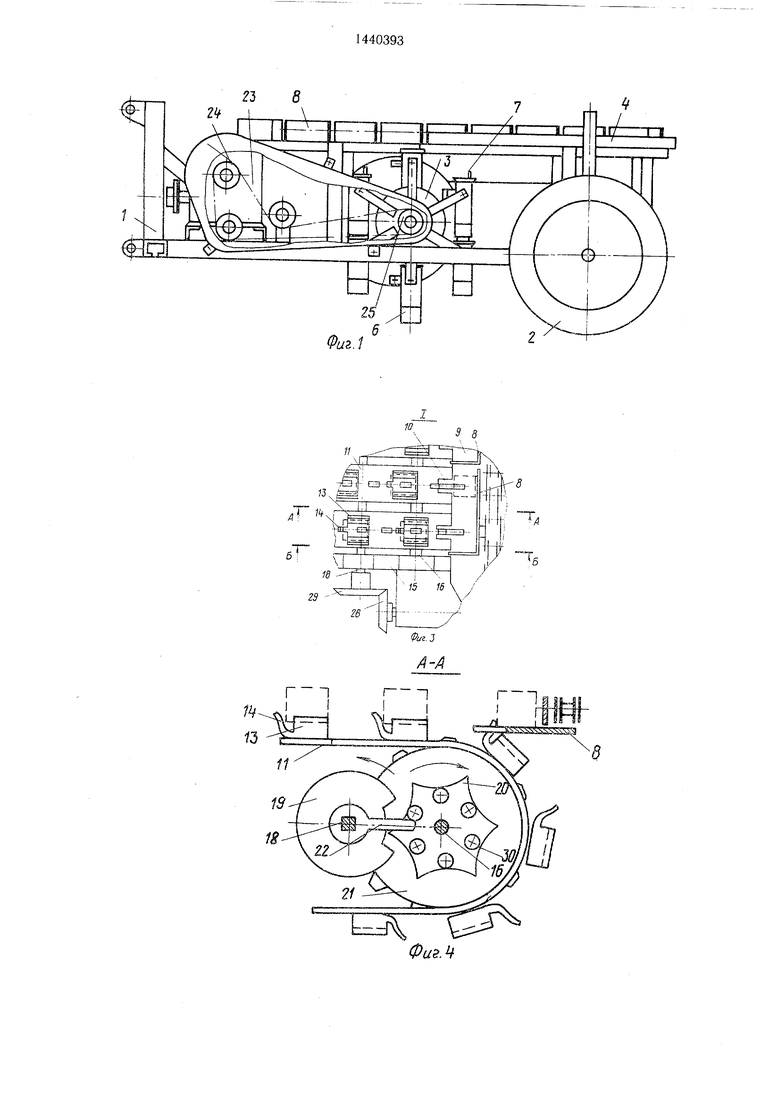
На фиг. 1 схематично изображена пред- лагае.мая машина, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - узел 1 на фиг. I (элемент секции питающего устройства, вид сверху); на фиг. 4 - разрез А-А -IQ на фиг. 3; на фиг. 5 - разрез Б-Б на фиг. 3.
Машина для посадки горшечной рассады состоит из рамы 1 с опорными колесами 2. На раме 1 машины закреплены высаживающий аппарат 3, зарядное устройство 4 и питающее устройство 5. Высаживающий ап- 5 парат 3 выполнен в виде системы паралле- ,ло1 раммпых механизмов с закрепленными па них посадочными емкостями 6 с выступами 7.
Зарядное устройство 4 размещено над .,„ высаживающим аппаратом 3 и выполнено в виде бесконечной цепи с закрепленными на ней захватами 8. В зоне рабочего хода захватов 8 (т. е. когда в захватах находится рассада) зарядное устройство 4 имеет опорвалу 17 не показаны). Пальцы 22 ведущих звеньев 19 мальтийского механизма первых (а) транспортеров 11 всех секций установлены в одинаковом исходном положении. Пальцы 22 ведущих звеньев 19 мальтийского механизма последующих (Ь) транспортеров 11 всех секций сдвинуты относительно предыдущего на угол, равный 2п/п, где п - количество транспортеров 11 в секции (в случае , приведенном на фиг. 2-5, пальцы 22 смещены друг относительно друга на 180°; при или они будут смещены друг относительно друга в каждом последующем транспортере соответственно на 120 или 90°). Ведомые звенья 20 мальтийских механизмов жестко соединены со звездочками 21, каждого из транспортеров 11 всех секций и свободно установлены на ведущем валу 16 в одинаковом положении.
Механизм привода машины состоит из червячного редуктора 23, звездочек цепных передач и конических шестерен. Все рабочие органы машины приводятся в действие от синхронного вала отбора мощности трактора, при этом привод высаживающего аппараную поверхность 9. На опорной поверхнос- 25 та 3 осуществляется через звездочки 24 и 25, ти 9 со стороны приемной ветви цепи за-а привод питающего устройства 5 через
звездочки 26 и 27 и пару конических щес- терен 28 и 29. Привод зарядного устройства 4 осуществляется выступами 7 посадочных емкостей 6 высаживающего аппарата 3. Машина работает следующим образом. Фиксаторы 12 рассады одновременно заполняются оператором с помощью известных устройств рассадой. Во время движения машины синхронный вал отбора мощности ......трактора через червячный редуктор 23 приширину отдельного транспортера 11, каждо- водит в действие все узлы машины. При этом му захвату 8 может соответствовать несколь-посадочные емкости 6 высаживающего аппако (два и более) транспортеров 11, объеди-рата 3, приводимые в движение от редукненных в секции. Количество секций должнотора 23 через звездочки 24 и 25, вращаясь
быть меньше или равно количеству захва-с постоянной угловой скоростью и оставаясь
тов 8 зарядного устройства 4 в зоне его 40 все время сориентированными вертикально
рядного устройства 3 выполнены выступы 10. Питающее устройство 5 выполнено в виде узких самостоятельных транспортеров 11 (ленточных, цепочных и т. п.), на которых закреплены фиксаторы 12 рассады, состоя- 30 цие нз оснований 13 и толкателей 14. В зависимости от шага расстановки захватов 8 на бесконечной цепи зарядного устройства 4, и размеров горшочка, определяющих размер фиксатора 12 рассады, а следовательно.
валу 17 не показаны). Пальцы 22 ведущих звеньев 19 мальтийского механизма первых (а) транспортеров 11 всех секций установлены в одинаковом исходном положении. Пальцы 22 ведущих звеньев 19 мальтийского механизма последующих (Ь) транспортеров 11 всех секций сдвинуты относительно предыдущего на угол, равный 2п/п, где п - количество транспортеров 11 в секции (в случае , приведенном на фиг. 2-5, пальцы 22 смещены друг относительно друга на 180°; при или они будут смещены друг относительно друга в каждом последующем транспортере соответственно на 120 или 90°). Ведомые звенья 20 мальтийских механизмов жестко соединены со звездочками 21, каждого из транспортеров 11 всех секций и свободно установлены на ведущем валу 16 в одинаковом положении.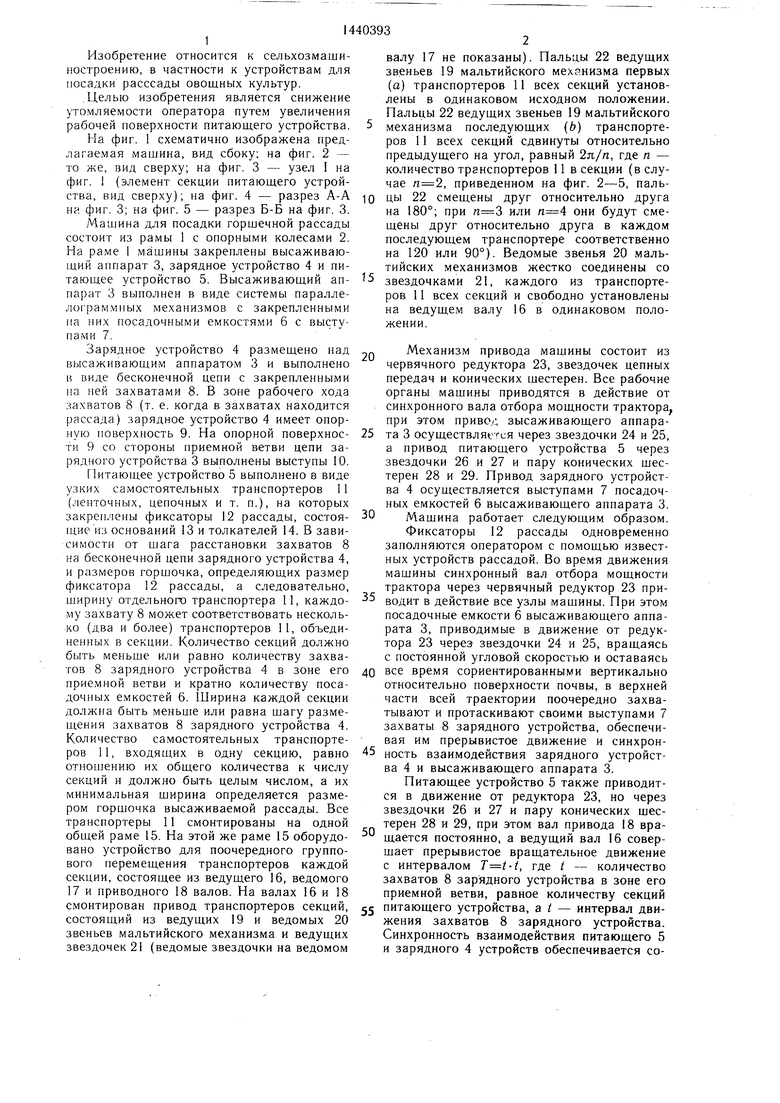
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для посадки горшечной рассады | 1984 |
|
SU1276279A1 |
| Машина для посадки горшечной рассады | 1988 |
|
SU1729318A1 |
| РАССАДОПОСАДОЧНАЯ МАШИНА | 1996 |
|
RU2102852C1 |
| Машина для посадки горшечной рассады | 1987 |
|
SU1501947A1 |
| АВТОМАТИЧЕСКАЯ РАССАДОПОСАДОЧНАЯ МАШИНА | 1990 |
|
RU2032302C1 |
| Машина для посадки горшечной рассады | 1980 |
|
SU1017196A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ РАССАДЫ В НАКОПИТЕЛЬ | 1998 |
|
RU2164734C2 |
| РАССАДОПОСАДОЧНАЯ МАШИНА | 2014 |
|
RU2606792C2 |
| Навесная механизированная сажалка для высадки рассады | 1987 |
|
SU1553027A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - снижение утомляемости оператора путем увеличения рабочей поверхности питающего устройства. Машина содержит раму 1 с опорными колесами 2, высаживаю- ший аппарат 3 с посадочными емкостями 6, зарядное устройство 4 с приемной ветвью и захватами 8 и питаюш,ее устройство 5 с фиксаторами рассады 12 и с приводом, вклю- чаюш,им ведуш,ий вал 16. Питающее устройю ство выполнено в виде собранных из самостоятельных транспортеров 11 идентичных секций, количество которых кратно количеству захватов зарядного устройства в зоне приемной ветви последнего. Привод питающего устройства дополнительно снабжен устройством для поочередного группового перемещения одноименных транспортеров каждой секции, которое содержит общий приводной ва.п 18 и самостоятельные для каждого транспортера мальтийские механизмы с внешни.м зацеплением, при этом ведомые звенья последних жестко соединены с ведущими звездочками своих транспортеров 11 и свободно установлены на ведущем валу привода в одинаковом положении, а ведущие звенья жестко закреплены на приводном валу и повернуты друг относительно друга так, что их пальцы в разноименных транспортерах каждой секции последовательно смещены на угол, равный отношению длины окружности к количеству транспортеров в секции, а в одноименных установлены одинаково. Ширина секций равна щагу установки захватов в зарядном устройстве. 2 з. п. ф-лы, 5 ил. 12 5 ;7 Ф сл 4 4ib О СО со 00 Фиг
приемной ветви и кратно количеству посадочных емкостей 6. Ширина каждой секции должна быть меньше или равна шагу размещения захватов 8 зарядного устройства 4. Количество самостоятельных транспортеров 11, входящих в одну секцию, равно отношению их общего количества к числу секций и должно быть целым числом, а их минимальная ширина определяется размером горшочка высаживаемой рассады. Все транспортеры 11 смонтированы на одной общей раме 15. На этой же раме 15 оборудовано устройство для поочередного группового перемещения транспортеров каждой секции, состоящее из ведущего 16, ведомого 17 и приводного 18 валов. На валах 16 и 18
смонтирован привод транспортеров секции, 5 питающего устройства, а i - интервал дви- состоящий из ведущих 19 и ведомых 20 жения захватов 8 зарядного устройства.
Синхронность взаимодействия питающего 5 и зарядного 4 устройств обеспечивается созвеньев мальтийского механизма и ведущих звездочек 21 (ведомые звездочки на ведомом
5
0
относительно поверхности почвы, в верхней части всей траектории поочередно захватывают и протаскивают своими выступами 7 захваты 8 зарядного устройства, обеспечивая им прерывистое движение и синхронность взаимодействия зарядного устройства 4 и высаживающего аппарата 3.
Питающее устройство 5 также приводится в движение от редуктора 23, но через звездочки 26 и 27 и пару конических шестерен 28 и 29, при этом вал привода 18 вращается постоянно, а ведущий вал 16 совершает прерывистое вращательное движение с интервалом , где / - количество захватов 8 зарядного устройства в зоне его приемной ветви, равное количеству секций
5 питающего устройства, а i - интервал дви- жения захватов 8 зарядного устройства.
отношением k, где k - целое число, тип - соответственно количество секций в питающем устройстве и количество посадочных емкостей на высаживающем аппарате и подбором передаточного отношения звездочек цепных передач. Групповое движение одноименных транспортеров 11 питающего устройства 5 осуществляется во время покоя цепи зарядного устройства 4 в момент остановки захватов 8 напротив секций 11. При этом пальцы 22 ведущего звена 19 мальтийского механизма привода первых одноименных (а) транспортеров 11 входят в зацепление с роликами 30 ведомых звеньев 20, поворачивая последние, а вместе с ними и соответствующие звездочки 21 на угол, обеспечивающий одновременное перемещение первых транспортеров 11 в каждой секции из исходного состояния до момента зарядки рассады Б змлваты 8 зарйдного устройства 4. Во время движения транспортеров 11, основания ;3 фиксатора 12 переме- щаются относительно выступов 10 опорной поверхности 9, подавая горшочки с рассадой на выступы 10, а толкатели 14 досылают их 8 захваты 8. Происходит групповая зарядка захватов 8 рассадой с первых (о) транспор- теров 11, после чего пальцы 22 выходят из зацепления с роликами 30 и ведомыми звеньями 20 и связанные с ними транспортеры 1 останавливаются. В этот момент очередная посадочная емкость 6 своим выступом 7 вновь сообщает цепи зарядного устройства 4 прерывистое движение, обеспечивая протаскивания захвата 8 с рассадой на очередной шаг. Во время совместного перемещения посадочной емкости 6 и захвата 8 с рассадой, рассада сходит с опорной поверхности 9 зарядного устройства и свободно падает в посадочную емкость 6, а затем переносится последней к поверхности поля и высаживается в почву. Очередные емкости 6 повторяют цикл, в тот момент, когда .последний захват 8 с рассадой покинет участок опорной поверхности 9 с выступами 10, расположенный напротив питающего устройства 5, пальцы 22 ведущих звеньев 19 привода вторых одноименных (Ь) транспортеров 11 каждой секции войдут в зацепление с роликами 30 своих ведомых звеньев 20, обеспечивая аналогичную работу следующей группы (Ь) транспортеров. Затем весь цикл повторяется снова.
Возможны и другие варианты устройства для поочередного группового перемещения одноименных транспортеров. Например, для случая, когда в секциях по два транспортера привод может состоять из одного общего для всех мальтийского механизма и двух валов - ведущего и ведомого, причем на ведущем валу установлены приводные звездочки,
5 О 5
0
0
5
имеющие по 2-3 зуба, смещенных друг относительно друга в соседних звездочках на 180° В этом случае мальтийский механизм будет сообщать ведущему валу прерывистое движение, а очередность включения тех или иных транспортеров осуществляется за счет смещения зубьев в приводных звездочках.
Применение предлагаемой машины для посадки горшочной рассады позволяет в два и более раз увеличить количество одновременно устанавливаемой на питающем устройстве рассады, что позволяет во столько же раз уменьшить частоту участия оператора в зарядке питающего устройства, а следовательно, и снизить его утомляемость.
Формул а изобретения
Фиг.1
, Шт
ГГ П
У , I ,1
fra
zi
Hi 1Ъ -1
гп
, J il
жп:
3N.
Jr-T
Y: Ъ
--еэ-щ-ез- -;
/5 16
Й/г,Л
1;
п
Фиё.Ч
f
i1
EZ3
В -В
(Риг.5
| Патент США № 3872805, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для посадки горшечной рассады | 1984 |
|
SU1276279A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
