о
О)
со
СО
Фиг.1
вые датчики 27, 28 и периодически взаимодействующий с ними магнит 29, установленные соответствеино на корпусе 1 и приемной головке 5, усилители, блок выдержки времени и триггер. Оператор нажимает на корпус 1. При этом приемная головка 5 с магнитом 29 начинает перемещаться относительно корпуса 1 и установленных на нем герконовых датчиков 27,28. Одни контакты датчика 27 размыкаются, а другие замыкаются, воздействуя на усилитель, включающий электромагнит 23. В результате этого по трубопроводу 15 через регулятор 24 давления подается сжатый воздух с давлением, необходимым для завинчивания крепежного элемента 9. При дальнейшем нажатии корпуса 1 вращение от двигателя 3 через отвертку 41 передается на головку крепежного элемента 9. Происходит процесс завинчивания крепежного элемента 9. 2 ил.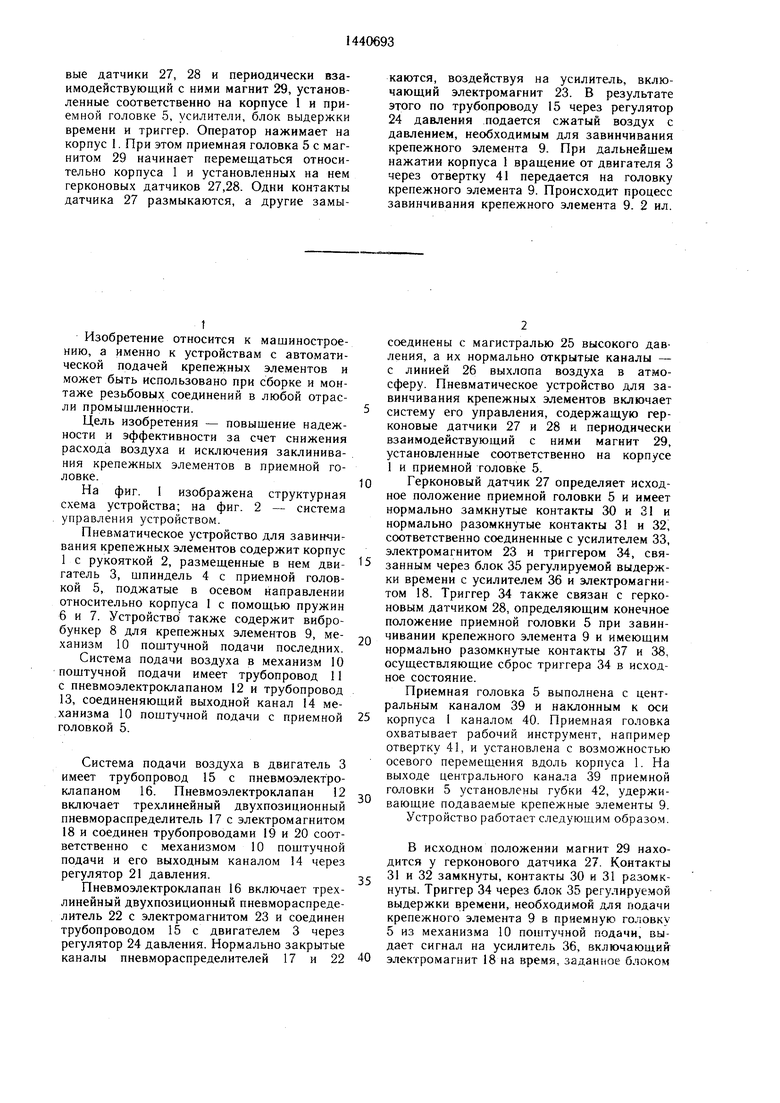

| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННЫЙ ПНЕВМАТИЧЕСКИЙ НАСОС ЗАМЕЩЕНИЯ | 2010 |
|
RU2427729C1 |
| УСТАНОВКА ДЛЯ ДОБЫЧИ ГАЗИРОВАННОЙ ЖИДКОСТИ | 2010 |
|
RU2421636C1 |
| Устройство для монтажа золотника в стебель вентиля пневматической камеры и наполнения ее воздухом | 1985 |
|
SU1242402A1 |
| СКВАЖИННЫЙ ПНЕВМАТИЧЕСКИЙ НАСОС ЗАМЕЩЕНИЯ | 2009 |
|
RU2403458C1 |
| УСТАНОВКА ДЛЯ ДОБЫЧИ НЕГАЗИРОВАННОЙ ЖИДКОСТИ | 2010 |
|
RU2421635C1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| Пневматическое переносное заворачивающее устройство с автоматической подачей винтов | 1980 |
|
SU921841A1 |
| Устройство для увлажнения дорожной поверхности | 1987 |
|
SU1414923A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ ПРУТКОВОГО МАТЕРИАЛА | 1991 |
|
RU2009792C1 |
Изобретение относится к машиностроению, а именно к устройствам с автоматической подачей крепежных элементов. Цель изобретения - повышение надежности и эффективности. Устройство содержит корпус 1 с рукояткой 2, двигатель 3, шпиндель 4 с приемной головкой 5, внбробункер 8, механизм 10 поштучной подачи. Система подачи воздуха в механизм 10 поштучной подачи имеет трубопровод 11 с пневмо- электроклапаном 12 и трубопровод 13, соединяющий выходной канал 14 механизма 10 поштучной подачи с приемной головкой. Система подачи воздуха в двигатель 3 имеет трубопровод 15 с пневмоэлектро- клапаном 16. Пневмоэлектроклапан 12 включает трехлинейный двухпозиционный пневмо- распределитель 17 с электромагнитом 18 и регулятор 21 давления. Пневмоэлектроклапан 16 включает трехлинейный двухпозиционный пневмораспределитель 22 с электромагнитом 23 и регулятор 24 давления. Система управления включает герконо (Л
1
Изобретение относится к машиностроению, а именно к устройствам с автоматической подачей крепежных элементов и может быть использовано при сборке и монтаже резьбовых соединений в любой отрасли промышленности.
Цель изобретения - повышение надежности и эффективности за счет снижения расхода воздуха и исключения заклинивания крепежных элементов в приемной головке.
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - система управления устройством.
Пневматическое устройство для завинчивания крепежных элементов содержит корпус 1 с рукояткой 2, размещенные в нем двигатель 3, шпиндель 4 с приемной головкой 5, поджатые в осевом направлении относительно корпуса 1 с помощью пружин 6 и 7. Устройство также содержит вибробункер 8 для крепежных элементов 9, механизм 10 поштучной подачи последних.
Система подачи воздуха в механизм 10 поштучной подачи имеет трубопровод 11 с пневмоэлектроклапаном 12 и трубопровод 13, соединеняющий выходной канал 14 механизма 10 поштучной подачи с приемной головкой 5.
Система подачи воздуха в двигатель 3 имеет трубопровод 15 с пневмоэлектроклапаном 16. Пневмоэлектроклапан 12 включает трехлинейный двухпозиционный пневмораспределитель 17 с электромагнитом 18 и соединен трубопроводами 19 и 20 соответственно с механизмом 10 поштучной подачи и его выходным каналом 14 через регулятор 21 давления.
Пневмоэлектроклапан 16 включает трехлинейный двухпозиционный пневмораспределитель 22 с электромагнитом 23 и соединен трубопроводом 15 с двигателем 3 через регулятор 24 давления. Нормально закрытые каналы пневмораспределителей 17 и 22
соединены с магистралью 25 высокого давления, а их нормально открытые каналы - с линией 26 выхлопа воздуха в атмосферу. Пневматическое устройство для завинчивания крепежных элементов включает
систему его управления, содержащую гер- коновые датчики 27 и 28 и периодически взаимодействующий с ними магнит 29, установленные соответственно на корпусе 1 и приемной головке 5.
Герконовый датчик 27 определяет исходное положение приемной головки 5 и имеет нормально замкнутые контакты 30 и 31 и нормально разомкнутые контакты 31 и 32, соответственно соединенные с усилителем 33, электромагнитом 23 и триггером 34, связанным через блок 35 регулируемой выдержки времени с усилителем 36 и электромагнитом 18. Триггер 34 также связан с герко- новым датчиком 28, определяющим конечное положение приемной головки 5 при завинчивании крепежного элемента 9 и имеющим нормально разомкнутые контакты 37 и 38, осуществляющие сброс триггера 34 в исходное состояние.
Приемная головка 5 выполнена с центральным каналом 39 и наклонным к оси
корпуса 1 каналом 40. Приемная головка охватывает рабочий инструмент, например отвертку 41, и установлена с возможностью осевого перемещения вдоль корпуса 1. На выходе центрального канала 39 приемной головки 5 установлены губки 42, удерживающие подаваемые крепежные элементы 9. Устройство работает следующим образом.
В исходном положении магнит 29 находится у герконового датчика 27. Контакты
31 и 32 замкнуты, контакты 30 и 31 разомкнуты. Триггер 34 через блок 35 регулируемой выдержки времени, необходимой для подачи крепежного элемента 9 в приемную головку 5 из механизма 10 поштучной подачи, выдает сигнал на усилитель 36, включающий
электромагнит 18 на время, заданное блоком
Далее оператор подводит устройство с выступающим из приемных губок 42 крепежным элементом 9 к месту его установки и нажимает на корпус 1. При этом приемная головка 5 с магнитом 29 начинает перемещаться относительно корпуса 1 и установленных на нем герконовых датчиков 27 и 28. Магнит 29 уходит от герконового датчика 27. Контакты 31 и 32 датчика 27 размыкаются, а его контакты 30 и 31 замыкаются, воздействуя на усилитель 33, включающий электромагнит 23. При срабатывании электромагнита 23 пневмораспределитель 22 открывается и по трубопроводу 15 через регулятор 24 давления подается сжатый воздух к двигателю 3 с давлением, необходимым для завинчивания крепежного элемента 9.
Затем оператор осуществляет дальней- щий нажим на корпус 1. При этом вращение от двигателя 3 через отвертку 41 передается на головку крепежного элемента 9, который выжимается из центрального канала 39 и своей головкой разводит губки 42. Происходит процесс завинчивания крепежного элемента 9. По окончании завинчивания магнит 29, установленный на приемной головке 5, подходит к герконовому датчику 28. Контакты 37 и 38 датчика 28 под
5
5
0
0
воздействием поля магнита 29 замыкаются, воздействуя на триггер 34 и сбрасывая его в исходное состояние.
После окончания завинчивания оператор отпускает корпус 1. Приемная головка 5 пружиной 6 возвращается в исходное положение, воздействуя магнитом 29 на герконо- вый датчик 27. Контакты 30 и 31 -размыкаются, отключая усилителем 33 электромагнит 23. Пневмораспределитель 22 закрывается, прекращая подачу воздуха по трубопроводу 15 в двигатель 3. Контакты 31 и 32 датчика 27 замыкаются, воздействуя на триггер 34, и цикл повторяется.
Формула изобретения
Пневматическое устройство для завинчивания крепежных элементов, содержащее корпус с рукояткой, размещенные в нем двигатель, щпиндель с приемной головкой, установленный с возможностью осевого пере- мещення относительно корпуса вибробункер, механизм пощтучной подачи, системы подачи воздуха в двигатель и в механизм пощтучной .подачи и систему управлення, отличающееся тем, что, с целью повыщения надежности и эффективности, каждая из систем подачи воздуха имеет пневмоэлектро- клапан и регулятор давления, а устройство снабжено магнитом и двумя герконо- выми датчиками для периодического взаимодействия с последним, установленными соответственно на приемной головке и корпусе.
JO
| СПОСОБ ИНКАПСУЛЯЦИИ ФЕНБЕНДАЗОЛА | 2013 |
|
RU2544165C2 |
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| Пневматическое переносное заворачивающее устройство с автоматической подачей винтов | 1980 |
|
SU921841A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
