XJ--4
Изобретение oiHOiinrc:.; к подъемно- транспортному оборудоваки), в частности к приводному устройству « кйлатора с реечным тяговым органом.
Цель изобретения - повышение надежности в работе устройства.
На фиг. 1 схематично представлена трасса эскалатора с приводными устройствами; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - кинематическая схема устройства; на фиг. 5 - схе- ю ш,их соображений. ма рабочего участка копирных поверхностей.
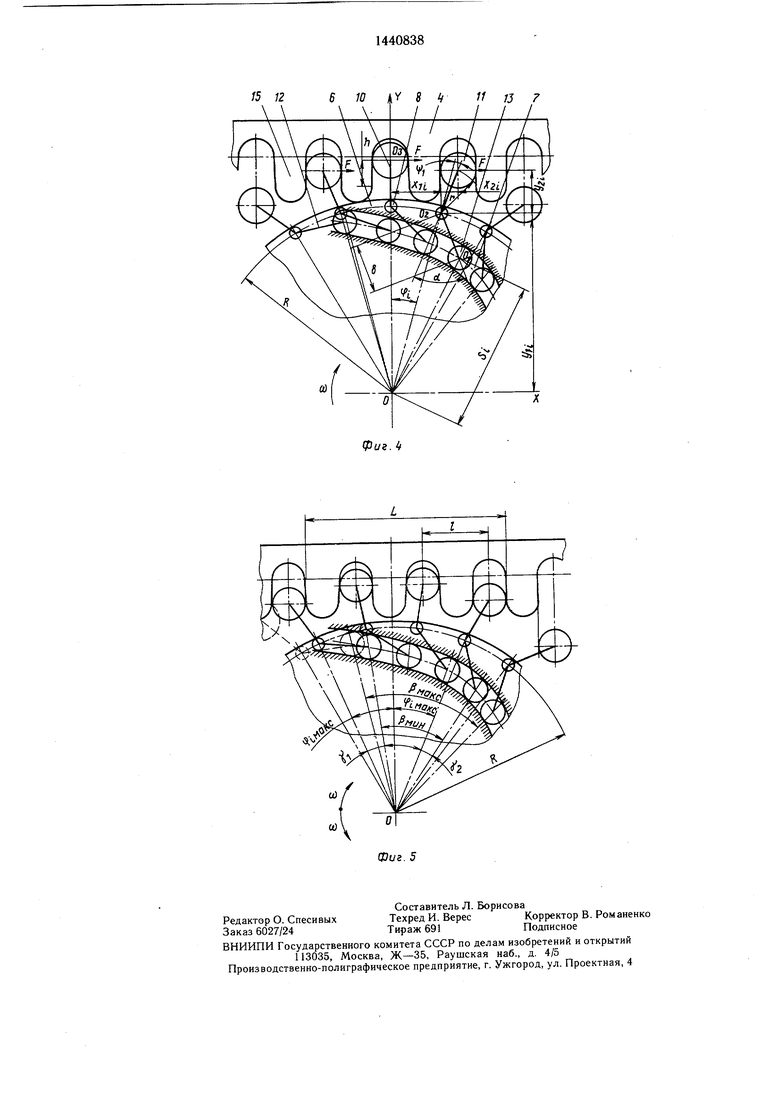
Приво}1ное устройство эскалатора включает в себя приводные механизмы 1, находящиеся в зацеплении одновременно с холостой 2 и рабочей 3 ветвями тягового органа, выполненного в виде зубчатых реек 4 с шагом, равным шагу ступеней полотна (не показаны) эскалатора. Каждый приводной механизм 1 выполнен в виде соосно расположенных на валу 5 приводного 6 и ко- пирного 7 дисков. Приводной диск 6 установ- 2о лен на валу 5 с возможностью вращения и снабжен .закрепленными с помощью шарниров 8 двуплечими рычагами 9, на плечах 10 которых смонтированы приводные ролики 11, а на плечах 12 - копирные ролики 13
зубьев 15, т. е. вдоль рейки 4. Одновременный контакт нескольких приводных роликов 11 с зубьями 15 рейки 4 и равномерное движение последней достигается за счет поворота двуплечих рычагов 9 и приводных 5 роликов 11 в шарнирах 8 при вращении прн- водного диска 6 и перемещении копирных роликов 13 по канавке 16, спрофилироваииой в пределах некоторого угла по определенной зависимости, которая выводится из следуюУсловие равномерного движения рейки 4 в точке О (центр вращений приводного диска 6) можно записать в виде
()const
(1)
где VP - скорость перемещения рейки 4;
0) - угловая скорость вращения приводного диска 6;
Я - радиус расположения центров О2 шарниров 8 приводного диска 6;
г - радиус поворота приводного ролика 11 в шарнире 8 (длина плеча 10 двуплечего рычага 9).
Величина перемещения рейки 4 и центра Оз приводного ролика 11 вдоль оси х в кажуглу поворота ф,- приводного диска 6, определяется уравнением
X, Vp-ii Vp
J& W
(2)
30
где ф,35
где Хи
40
с упругим ободом 14. Приводные ролики 11 25 дый момент времени г,, соответствующий установлены с возможностью зацепления с зубьями 15 зубчатых реек 4. Рабочие поверхности зубьев 15 выполнены параллельными друг другу. Копирный диск 7 установлен на валу 5 неподвижно и на его торцовой поверхности, обращенной к приводному диску 6, выполнена канавка 16 с двумя замкнутыми криволинейными копирными поверхностями 17 и 18, находящимися во взаимодействии с копирными роликами 13 привод- пого диска 6. При этом копирные поверхности 17 и 18 выполнены эквидистантными траектории движения центров Oi копирных роликов 13, а кривизна поверхностей, 17 и 18 выбрана из условия обеспечения заданного коэффициента перекрытия s реечного зацепления (количество одновременно находящихся в зацеплении приводных роликов).
Устройство работает следующим образом.
При вращении вала 5 приводной диск 6 также начинает вращаться, а приводные ролики П. зацепленные одновременно с холостой 2 и рабочей 3 ветвями, приводят в движение зубчатые рейки 4 тягового органа, а следовательно, и ступени полотна эскалатора.
Основными условиями, предъявляемыми к работе приводного устройства эскалатора, являются обеспечение равномерного движения тягового органа, исходя из прочностных расчетов, одновременно находящихся в зацеплении нескольких приводных роликов 11, т. е.,исходя из заданного коэффнциента перекрытия 8 зацепления, и отсутствие в зацеплении сил отпора и сил трения скольжения.
Тяговое усилие F в зацеплении (см. фиг. 4 и 5) направлено перпендикулярно профилю
угол, образованный между осью Y и линией, соединяющей центр О с центром О2 шарнира 8. Подставив в (2) значение (1), получим
X-(-fr)9;.(3)
Из геометрии зацепления получим
Х,;С|,-+Х2,-;(4)
величина перемещения вдоль оси X центра Оз приводного ролика 11 при повороте приводного диска 6 на угол ф,-;
- величина перемещения вдоль оси X центра Оз приводного ролика 11 при повороте его в шарнире 8 на угол ф; за время поворота приводного диска 11 на угол ф;
Xu R-sln(fi,(5)
Х2,- г-51п(ф,-4- ф.-);(6)
; ; / -51пф,-4-Г-з1п(ф,- + -ф,-),(7)
угол разворота плеча 12 рычага 9 относительно центра О2. Сопоставляя (3) (7), получим
(( 51Пф/+Л 51п(ф;4- Ф )Значение угла % из (8)
где 1J5/
(8)
(R+r)(fi-R-sm Di}
ф; аГС51П - J-J.
(9)
Расстояние S, от центра Оз вращения 55 приводного диска б до центра Oi копирного ролика 13 является функцией угла ф/. Из треугольника О-Oi-Оа имеем
cos(a-%);(10)
ш,их соображений.
зубьев 15, т. е. вдоль рейки 4. Одновременный контакт нескольких приводных роликов 11 с зубьями 15 рейки 4 и равномерное движение последней достигается за счет поворота двуплечих рычагов 9 и приводных роликов 11 в шарнирах 8 при вращении прн- водного диска 6 и перемещении копирных роликов 13 по канавке 16, спрофилироваииой в пределах некоторого угла по определенной зависимости, которая выводится из следуюш,их соображений.
Условие равномерного движения рейки 4 в точке О (центр вращений приводного диска 6) можно записать в виде
()const
(1)
где VP - скорость перемещения рейки 4;
0) - угловая скорость вращения приводного диска 6;
Я - радиус расположения центров О2 шарниров 8 приводного диска 6;
г - радиус поворота приводного ролика 11 в шарнире 8 (длина плеча 10 двуплечего рычага 9).
Величина перемещения рейки 4 и центра Оз приводного ролика 11 вдоль оси х в каждый момент времени г,, соответствующий
углу поворота ф,- приводного диска 6, определяется уравнением
дый момент времени г,, соответствующий
X, Vp-ii Vp
J& W
(2)
ент времени г,, соответствующий
0
где ф,5
где Хи
0
5 дый момент времени г,, соответствующий
угол, образованный между осью Y и линией, соединяющей центр О с центром О2 шарнира 8. Подставив в (2) значение (1), получим
X-(-fr)9;.(3)
Из геометрии зацепления получим
Х,;С|,-+Х2,-;(4)
величина перемещения вдоль оси X центра Оз приводного ролика 11 при повороте приводного диска 6 на угол ф,-;
- величина перемещения вдоль оси X центра Оз приводного ролика 11 при повороте его в шарнире 8 на угол ф; за время поворота приводного диска 11 на угол ф;
Xu R-sln(fi,(5)
Х2,- г-51п(ф,-4- ф.-);(6)
; ; / -51пф,-4-Г-з1п(ф,- + -ф,-),(7)
угол разворота плеча 12 рычага 9 относительно центра О2. Сопоставляя (3) (7), получим
(( 51Пф/+Л 51п(ф;4- Ф )Значение угла % из (8)
где 1J5/
(8)
(R+r)(fi-R-sm Di}
ф; аГС51П - J-J.
(9)
Расстояние S, от центра Оз вращения приводного диска б до центра Oi копирного ролика 13 является функцией угла ф/. Из треугольника О-Oi-Оа имеем
cos(a-%);(10)
где b - расстояние от центра О2 шарнира 8 до центра Oi копирного ролнка 13 (длина плеча 12 двуплечего рычага 9);
ос - угол разворота плеч 10 и 2 двуплечего рычага 9. Подставив (9) в (10) и преобразив, получим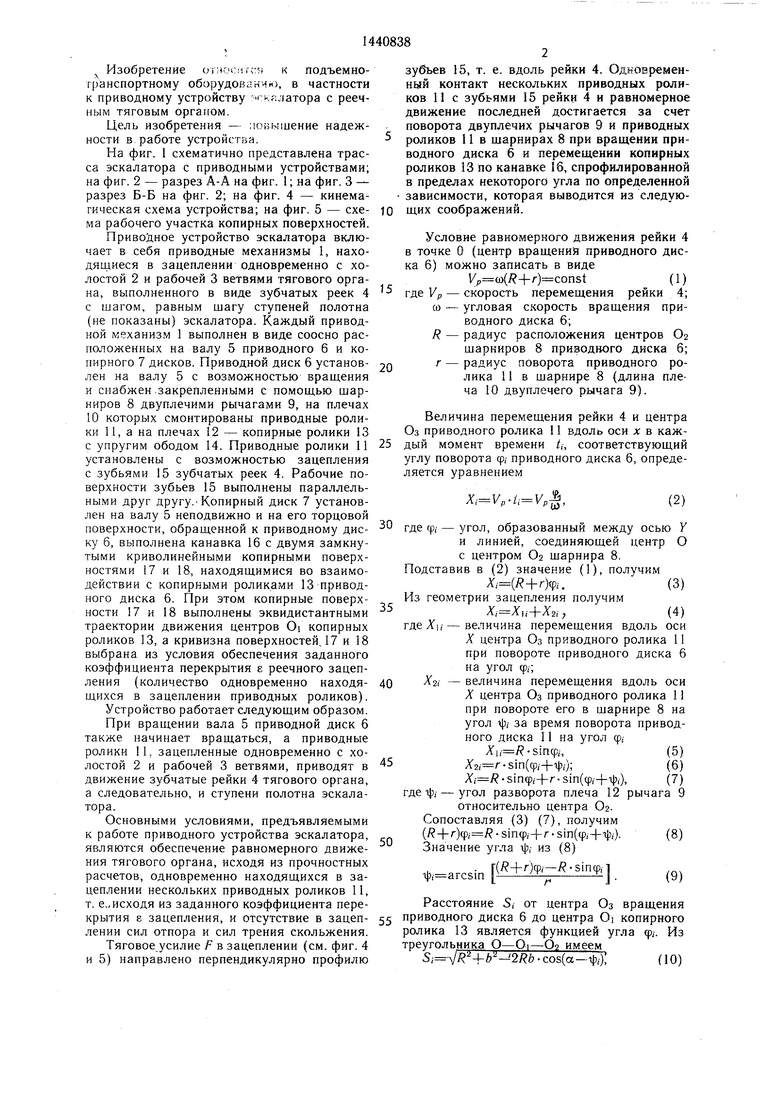
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Намоточное устройство | 1981 |
|
SU1034810A2 |
| Устройство для смазки тяговых цепей конвейера | 1980 |
|
SU910510A1 |
| Устройство для изготовления спиральных трубчатых электронагревателей | 1988 |
|
SU1530311A2 |
| Наматочное устройство | 1980 |
|
SU867450A1 |
| ТРУБОЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ РЕЗЬБОВОГО СОЕДИНЕНИЯ ТРУБЧАТЫХ ЭЛЕМЕНТОВ | 1994 |
|
RU2078900C1 |
| Предохранительное устройство каретки грузоподъемного механизма | 1986 |
|
SU1315375A1 |
| РЕЕЧНАЯ ПЕРЕДАЧА | 2003 |
|
RU2230244C1 |
| Полуавтоматическая круглоделительная машина | 1983 |
|
SU1146176A1 |
| Питатель к измельчителю стебельных материалов | 1990 |
|
SU1796098A1 |

Изобретение относится к подъемно- транспортному машиностроению. Цель изобретения - повышение надежности в работе. Приводное устройство содержит приводные механизмы, находящиеся в зацеплении одновременно с холостой и рабочей ветвями тягового органа, выполненного в виде зубчатых реек 4. Каждый приводной механизм включает в себя соосно расположенные приводной диск 6 и копирный диск 7. Диск 6 установлен с возможностью вращения и снабжен закрепленными с помощью щарни- ров 8 двуплечими рычагами 9, на плечах 0 которых смонтированы приводные ролихк 11, а на плечах 12 - копирные ролики 13, установленные с возможностью зацепления с зубьями реек 4. Диск 7 установлен неподвижно и на его торцовой поверхности выполнена канавка с двумя замкнутыми криволинейными копирными поверхностями, находящимися во взаимодействии с копирными роликами 13. Поверхности канавки диска 7 выполнены эквидистантными траектории движения центров копнрных роликов 13. Одновременный контакт нескольких приводных роликов И с зубья 5и рейк; 4 и равномерное движение последней достигается за счет поворота двуплечих рычагов 9 и приводных роликов 11 в щарн1;рах 8 при вращении диска 6 и перемещения роликов 3 по канавке диска 7, спрофилированной в пределах некоторого угла. з. п. ф-лы, 5 ил. П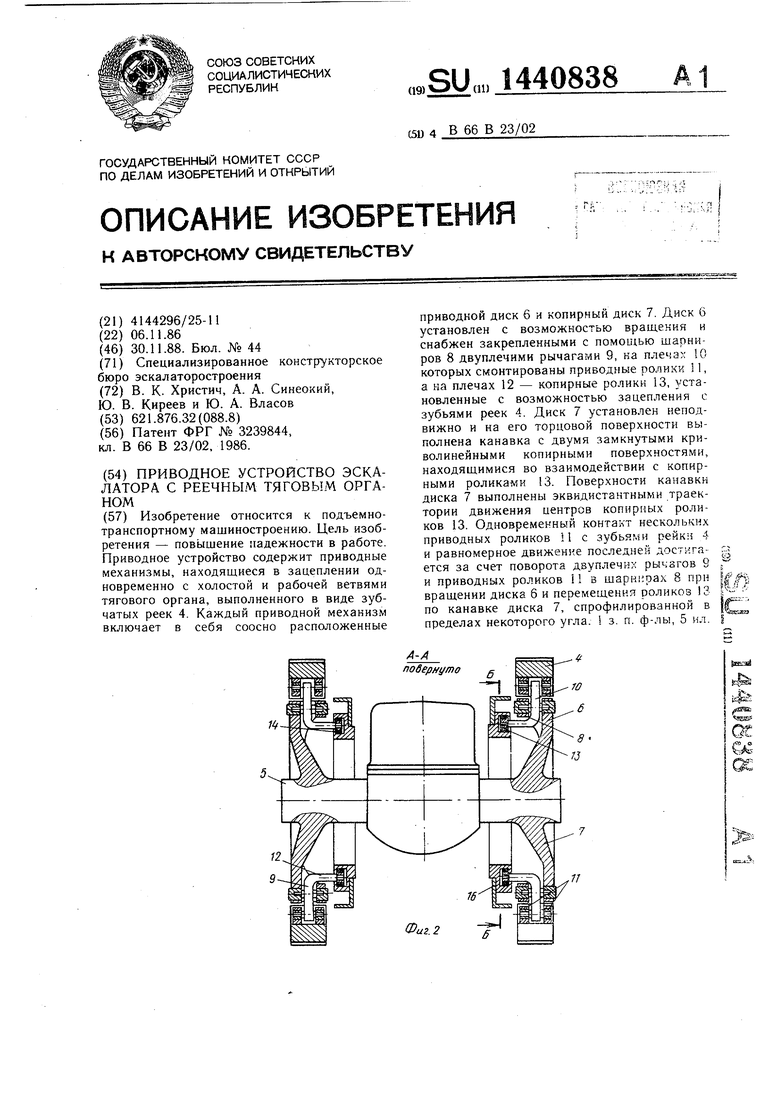
S.4-642/ 6.cos a-cp,.+arcsin
Величина перемещения центра Оз приводного ролика 11 вдоль оси У при повороте приводного диска 6 на угол ф, определяется уравнением
,.(1-С05ф/)+г 1-С05(ф,- + -ф/)(12)
где - величина перемещения вдоль оси У центра Оз приводного ролика 11 при повороте приводного диска 6 на угол ф,-;
Y2i - величина перемещения вдоль оси У центра Оз приводного ролика 11 при повороте его в щарнире 8 на угол г|); за время поворота приводного диска 6 на угол ф,.
Коэффициент перекрытия зацепления определяется из отнощения
оLI
ь.- -р- ,
длина линии контакта зуба 15 рейки 4 н приводного ролика 11
/о у
,(14)
ax
величина перемещения центра Оз приводного ролика И, соответствующая углу поворота Ф max, при котором начинается контакт зуба 15 рейки 4 с роликом 11 до оси У; / - шаг зацепления.
-max
Величина Xi max определяется высотой h рабочей поверхности зуба 15 рейки 4. Угол поворота ф шал: приводного диска 6, соответствующий величине перемещения центра Оз приводного ролика 11 Xi max, может быть определен из уравнения (12) при У,Л.
Таким образом, благодаря качению копирного ролика 13 по рабочему участку криволинейных копирных поверхностей 17 и 18 копирного диска 7 относительное движение приводного ролика 11 и рейки 4 является возвратно-поступательным.
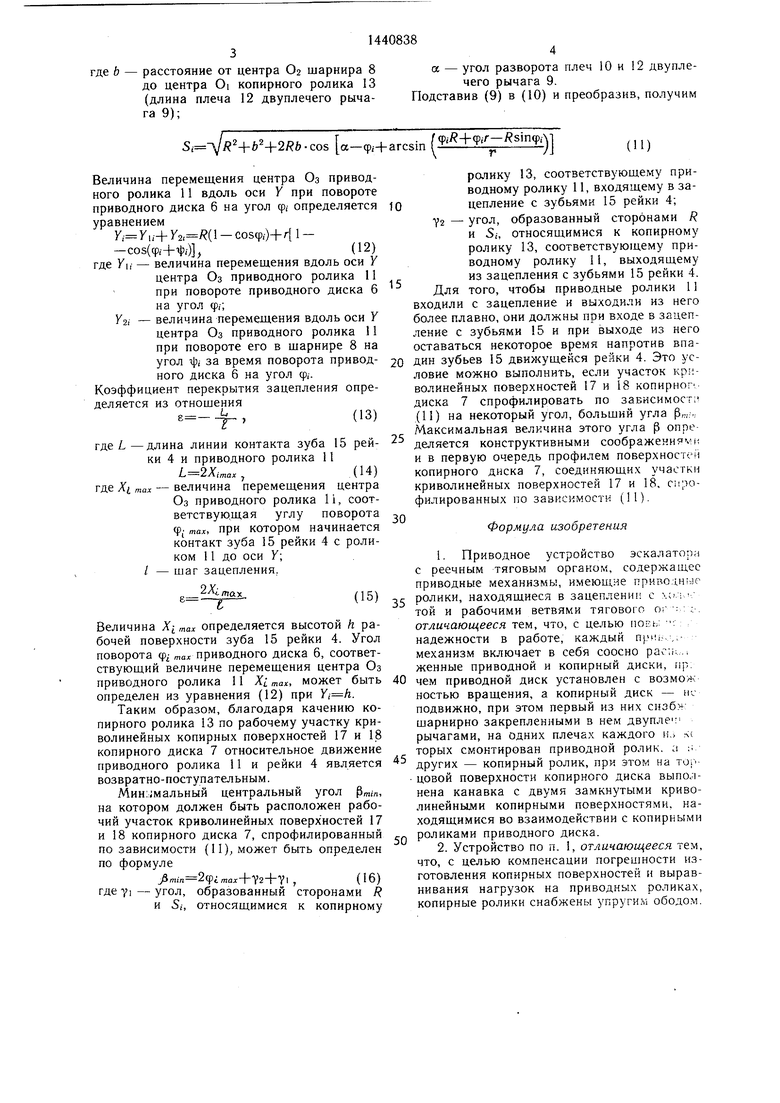
Мин:;мальный центральный угол Ртт- на котором должен быть расположен рабочий участок криволинейных поверх ностей 17 и 18 копирного диска 7, спрофилированный по зависимости (II); может быть определен по формуле
(fimax+y2 + y ,(16)
где YI - угол, образованный сторонами R и Si, относящимися к копирному
:п)
15
ролику 13, соответствующему приводному ролику 11, входящему в за- tOцепление с зубьями 15 рейки 4;
Y2 - угол, образованный сторонами R и Si, относящимися к копирному ролику 13, соответствующему приводному ролику 11, выходящему из зацепления с зубьями 15 рейки 4. Для того, чтобы приводные ролики 11 входили с зацепление и выходили из него более плавно, они должны при входе в зацепление с зубьями 5 и при выходе из него оставаться некоторое время напротив впа- 20 дин зубьев 15 движущейся рейки 4. Это условие можно выполнить, если участок криволинейных поверхностей 17 и 18 копирног- диска 7 спрофилировать по зависимост; (11) на некоторый угол, больщий угла рт/,, Максимальная величина этого угла р опре- деляется конструктивными соображениями и в первую очередь профилем поверхностен копирного диска 7, соединяющих участки криволинейных поверхностей 17 и 18, спрофилированных по зависимости (11).
Формула изооретения
зс ролики, находящиеся в зацепленим с x;.: .- той и рабочими ветвями тягового or-::;. отличающееся тем, что, с целью ПОЕЬ: . : : надежности в работе, каждый приь-л;- механизм включает в себя соосно рас;;;. женные приводной и копирный диски, пр;
40 чем приводной диск установлен с возмож ностью вращения, а копирный диск - не подвижно, при этом первый из них шарнирно закрепленными в нем двуплеч рычагами, на одних плечах каждого si, л( торых смонтирован приводной ролик, а :других - копирный ролик, при этом на TOiV
цовой поверхности копирного диска выполнена канавка с двумя замкнутыми криво- линейны.ми копирными поверхностями, находящимися во взаимодействии с копирными cf. роликами приводного диска.
45
Л
9иг.З
| Патент ФРГ № 3239844, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
