22
(Л
00
ot | ел со и
груза. Захват состоит из двурогой вилки 1, подвешенной на грузовом стропе 2 и имеющей паз 3с зубом 4, эксцентрикового кулачка 6 с зубом 7, вращающегося на оси 8, противовеса 9, перемещение которого ограничено упорами 10 и 11, пружины 12, подвешенного на оси 4 рычага 15, два положения которого фиксируются подпружиненным шариком 18 в выемках 19 и 20. В боковине вилки на оси 22 шар нирно подвешен дополнительньй рычаг 23, кинематически связанньй с фиксатором 27, имеющим углубление, в которое входит подпружиненный стопор 34, хвостовик которого через щарнир 35 связан с концом копира 36, укрепленного на кронштейне 37 и взаимодействующего с роликом 38. Паз 3 захвата опускают на скобу, в результате чего кулачок 6 поворачивается, пропуская скобу в паз. В процессе подъе
1
ма груза зуб 7
кулачка 6 нагружается, противовес 9 ложится на упор 10 и утапливает фиксатор 27, который защелкивается стопором 34. При этом дополнительный рычаг 23 отводитсяиз зоны паза 3. Застроповка груза осуществлена. При расстроповке груз ставят на основание и продолжают опускать захват, в результате чего рычаг 15 перемещается до фиксации ша- рика 18 в выемке 19. При этом пружина 12 отжимается и кулачок 6 под действием противовеса 9 поворачивается, ролик 38 перемещается по копиру 36 и сжимая пружину стопора 34, открывает его. Дополнительный рычаг 23 возвращается в исходное положение,п ерекры- вая паз 3. Скоба выходит из паза 3 захвата. При этом рычаг 15 перемещается в KpaiiHee положение и фиксируется шариком 18 в выемке 20. Захват готов к очередной застроповке. 2 ил.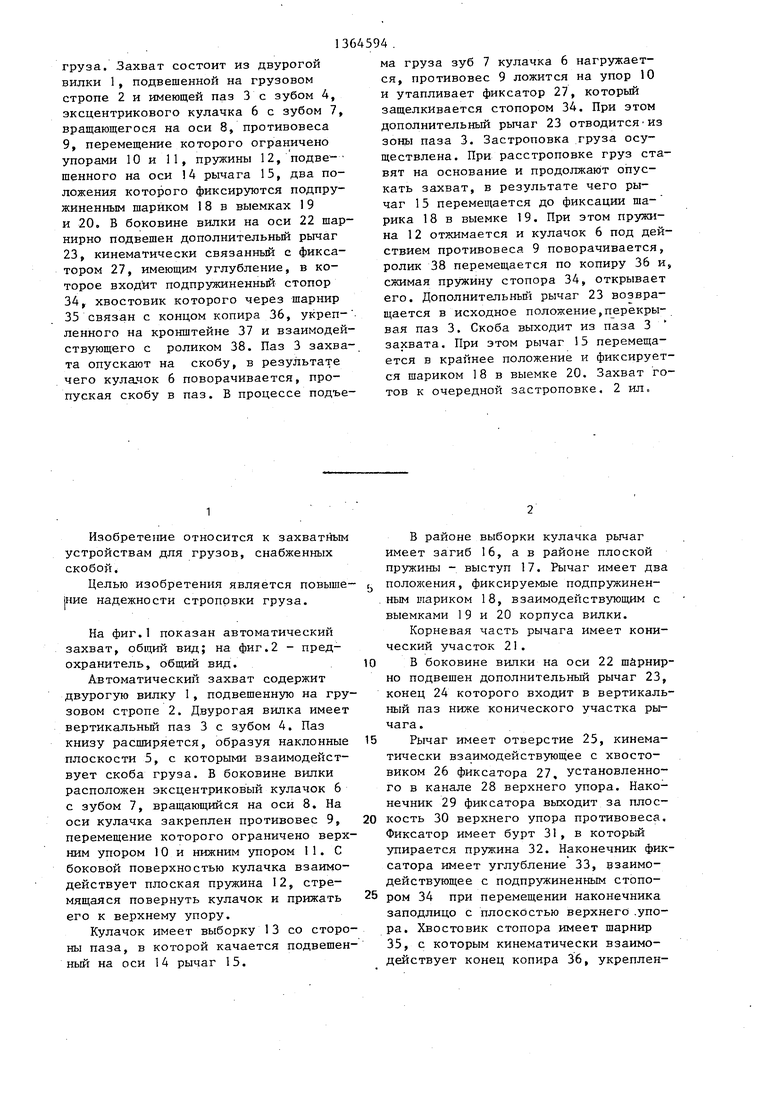

| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Грузозахватное устройство | 1975 |
|
SU543606A2 |
| Автоматическое захватное приспособление для контейнеров | 1956 |
|
SU107812A1 |
| Захват-кантователь | 1979 |
|
SU823260A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Станция погрузки-разгрузки перемещаемого по пневмотрубопроводу контейнера с торцовыми крышками | 1987 |
|
SU1497133A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Саморасцепляющееся грузозахватное устройство | 1981 |
|
SU992386A1 |
| АРБАЛЕТ | 2001 |
|
RU2197697C2 |
| ПИШУЩАЯ МАШИНКА | 1971 |
|
SU322874A1 |

Изобретение относится к захватным устройствам для грузов, снабженных скобой. Целью изобретения является повьшение надежности строповки
1
Изобретение относится к захватным устройствам для грузов, снабженных скобой
Целью изобретения является повыше- |ние надежности строповки груза.
На фиг.1 показан автоматический захват, общий вид; на фиг.2 - предохранитель, общий вид.
Автоматический захват содержит двурогую вилку 1, подвешенную на грузовом стропе 2. Двурогая вилка имеет вертикальньй паз 3 с зубом 4. Паз книзу расширяется, образуя наклонные плоскости 5, с которыми взаимодействует скоба груза. В боковине вилки расположен эксцентриковый кулачок 6 с зубом 7, вращающийся на оси 8. На оси кулачка закреплен противовес 9, перемещение которого ограничено верхним упором 10 и нижним упором 11. С боковой поверхностью кулачка взаимодействует плоская пружина 12, стремящаяся повернуть кулачок и прижать его к верхнему упору.
Кулачок имеет выборку 13 со стороны паза, в которой качается подвешен- ньм на оси 14 рычаг 15.
В районе выборки кулачка рычаг имеет загиб 16, а в районе плоской пружины - выступ 17. Рычаг имеет два
положения, фиксируемые подпружинен- ным шариком 18, взаимодействующим с выемками 19 и 20 корпуса вилки.
Корневая часть рычага имеет конический участок 21.
В боковине вилки на оси 22 шйрнир- но подвешен дополнительный рычаг 23, конец 24 которого входит в вертикальный паз ниже конического участка рычага.
Рычаг имеет отверстие 25, кинематически взаимодействующее с хвостовиком 26 фиксатора 27, Установленного в канале 28 верхнего упора. Наконечник 29 фиксатора выходит за плоскость 30 верхнего упора противовеса. Фиксатор имеет бурт 31, в который упирается пружина 32. Наконечник фиксатора имеет углубление 33, взаимодействующее с подпружиненным стопором 34 при перемещении наконечника заподлицо с плоскостью верхнего .упора. Хвостовик стопора имеет шарнир 35, с которым кинематически взаимодействует конец копира 36, укреплен38,-скрепленный с противовесом. На копире имеется выступ 39.
Захват работает следующим образом
Подвешенньй на грузовом стропе 2 захват подводят к грузу и опускают на вертикальную скобу. Захват взаимодействует со скобой, в результате кулачок 6 поворачивается, преодо15е- вая усилие пружины 12, пропускает скобу в паз 3 двурогой вилки и защелкивает ее. В процессе подъема груза зуб 7 кулачка 6 нагружается, противовес 9 ложится на упор IО и утапливает наконечник 29, которьш защелкивается подпружиненным стопором 34. При этом дополнительный рычаг 23 отводится из зоны паза 3, застроповка груза осуществленао
При расстроповке груз ставят на основание и продолжая опускать захват, воздействуют скобой на коничес20 вьппе роге вилки над и под противовесом ограничителями поворота кулачка, представляющими собой упоры, первый из которых выполнен с каналом, установленным в последнем фиксирз ощим
кий участок 21, в результате рычаг 5 25 подпружиненным стержнем, выполненным
перемещается до фиксации шарика 18 в выемке 19. Рычаг 15 своим выступом 17 отжимает прулоину 12, и кулачок 6 под действием противовеса 9 поворачивается,, ролик 38 перемещается по копиру 36 и, сжимая пружину стопора 34, открывает его. Дополнительный рычаг 23 возвращается под действием пружины 32 в исходное положение, перекрывая паз 3. Не встречая сопротивление, скоба выходит из паза 3 захвата.
с выступающим за плоскость первого упора наконечгшком и углублением в боковой поверхности, подпружиненным стопором, кинематически связанным с
30
противовесом с возможностью захода в углубление фиксирующего стержня, шар- нирно прикрепленным к упомянутому выше фиксирующему стержню с ВОЗ;МОЖНОСтью перекрывания расширяющегося КРШ- 25 ЗУ проема вилки дополнительным рычагом.
При выходе из паза 3 скоба перемещает загиб 16 рычага 15 в кр.айнее положение и фиксирует его подпружиненным шариком 18 в выемке 20.
Захват готов к очередной застро- повке.
Формула изоб ретения
Автоматический захват, содержащий двурогую вилку с вертикальным расширяющимся книзу проемом, установленный на одном из рогов ви-пки эксцентриковый подпружиненный захватный кулачок с противовесом, отличающийся тем, что, с целью повышения надежности строповки груза, он снабжен расположенными на указанном
вьппе роге вилки над и под противовесом ограничителями поворота кулачка, представляющими собой упоры, первый из которых выполнен с каналом, установленным в последнем фиксирз ощим
с выступающим за плоскость первого упора наконечгшком и углублением в боковой поверхности, подпружиненным стопором, кинематически связанным с
противовесом с возможностью захода в углубление фиксирующего стержня, шар- нирно прикрепленным к упомянутому выше фиксирующему стержню с ВОЗ;МОЖНОСтью перекрывания расширяющегося КРШ- ЗУ проема вилки дополнительным рычагом.
(Риг. 2
Л 2
| Автоматическое захватное приспособление для контейнеров | 1956 |
|
SU107812A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
