блока 7 и датчика 4. С помощью блока 12 и сумматора 9 осуществляется дополнительное высокочастотное переключение сигнала по управляющему входу частоты преобразователя 2. В электро- приводе возникает скользящий режим с
требуемыми динамическими и статическими показателями. Блок 11 обеспечивает защиту преобразователя 2 от перегрузок в случае срыва скользящего режима в системе или в аварийных режимах. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Электропривод переменного тока | 1988 |
|
SU1577060A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-управляемый электропривод | 1981 |
|
SU1010714A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ С СИСТЕМОЙ ПРЕДИКТИВНОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2024 |
|
RU2829212C1 |
| Устройство управления асинхронным двигателем | 2019 |
|
RU2723671C1 |
| УСТРОЙСТВО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2766907C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
Изобретение относится к. электротехнике. Целью изобретения является повышение устойчивости в переходных режимах. С этой целью в асинхронный электропривод введен блок 12 умножения, первым входом соединенньш с выходом задатчика 10 скольжения, вторым входом - с выходом релейного блока 7, а выходом - с вторым входом сумматора 9. Задатчик 10 вьтолнен в виде нелинейного блока, реализующего зависимость критического скольжения от частоты. Его вход соединен с выходом датчика 4 частоты вращения асинхронного двигателя 1 с коротко- замкнутым ротором. Двигатель 1 подключен через датчик 3 тока к статическому преобразователю 2 частоты. Управляющие входы преобразователя 2 соединены с выходами релейного блока 7, сумматора 9 и блока 11 ограничения тока. Вход блока 11 соединен с выходом датчика 3. Электропривод содержит также последовательно соединенные задатчик 5 частоты вращения и блок 6 сравнения, выходом соединенный с входом репейного блока 7. Второй вход блока 6 соединен с выходом идентификатора 8 состояния асинхронного двигателя. Входа идентификатора 8 подключены к выходам релейного I (Л 4 { оо гч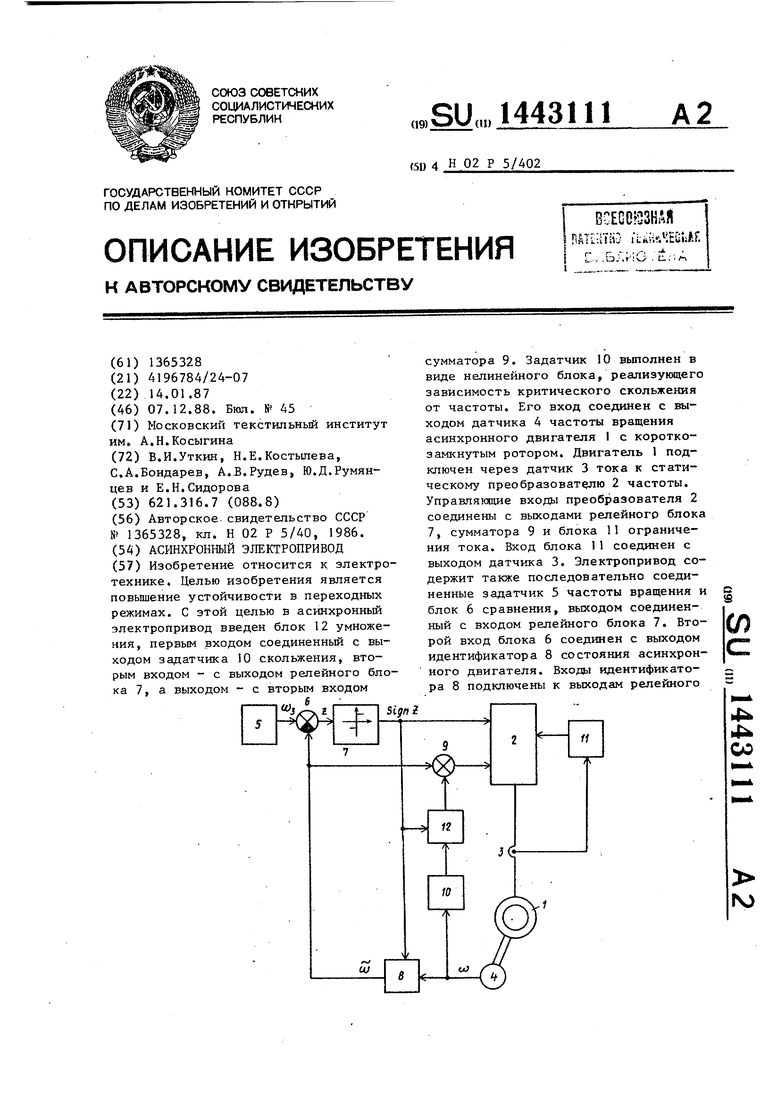
Изобретение относится к электротехнике, а именно к частотноуправляе- NbiM электроприводам, построенным на. основе асинхронных двигателей с ко- роткозамкнутым ротором, может быть использовано для регулирования частоты вращения нагрузки и является усо- вершенствовш1ием изобретения по авт. св. № 1365328.
Цель изобретения - повышение устойчивости работы в переходных режимах.
На чертеже представлена функциональная схема асинхронного электропривода.
Электропривод содержит асинхронный двигатель 1 с короткозамкнутым ротором, статический преобразователь 2 частоты с тремя управлякщими входами, подключенный выходом к обмоткам статора указанного асинхронного двигателя 1 датчик 3 токов статора, датчик 4 частоты вращения, последовательно соединенные задатчик 5 частоты вращения, блок 6 сравнения, снабженный вторым входом, и релейный элемент 7, иденти41икатор 8 состояния асинхронного двигателя, подключеннь й входами к выходам релейного элемента 7 и датчика 4 частоты вращения, а выходом - к второму входу блока сравнения, сумматор 9, подключенный первым входом к выходу идентификатора 8 состояния асинхронного двигателя, задатчик 10 скольжения и блок 1:1 ограничения токов статора, подключенный входом к выходу датчика 3 токов статора, при этом выходы сумматора 9, релейного элемента 7 и блока -11 ограничения токов статора подключены к соответ ствующим управляющим BkoflaM статического преобразователя 2 частоты.
В асинхронный электропривод введен блок 12 умножения, а задатчик 10 скольжения выполнен в виде нелинейного блока, реализующего зависимость 5 критического скольжения от частоты вращения, и снабжен входом, подключенным к выходу датчика 4 частоты вращения. При этом один из входов блока 12 умножения и его выход подключены соответственно между выходом задатчика скольжения 10 и вторым входом сумматора 9, а другой вход блока .12 умножения соединен с выходом релейного элемента 7.
Асинхронный электропривод работает следующим образом.
fO
15
Сигнал задания частоты w вращения поступает с выхода задатчика 5 на
один из входов блока сравнения, на другой вход которого поступает сигнал ui с выхода идентификатора 8 состояния асинхронного двигателя. Сигнал ошибки Z «ж), - си с выхода блока
сравнения 6 воздействует на релейный элемент 7, на выходе которого получают sign Z, В зависимости от сигнала sign Z, поступающего на соответствующий управляющий вход (вход управления по фазе) преобразователя частоты 2, осуществляется инвертирование его выходного напряжения. При этом, когда а) J 7(2, асинхронный двигатель I работает в двигательном режиме и, если развиваемый момент больще момента сопротивления, частота вращения ы ротора увеличивается. Если
U) , то фаза вектора выходного напряжения преобразователя частоты меняется на 180 и в асинхронном двигателе 1 возникает тормозной момент, определянлций уменьшение частоты вращения ротора. Переключение фазы напряжения на двигателе вблизи положения равновесия могут происходить с высокой частотой, что определяет возникновение в электроприводе скользящего режима управления, характеризующего инвариантностью к возмущающим воздействиям (в пределах энергетических возможностей электропривода).
Воздействие только на фазу выход- ного напряжения преобразователя час- тоты определяет ограничение, накладываемое на скорость изменения задания частоты вращения Wj. Если при .резком уменьшении сигнала w не обеспечивается снижение текущей частоты вращения ниже уровня время кратковременно действующего, тормозного момента, то асинхронный двигатель вновь входит в двигательный режим, что приводит к увеличению w , а с 1едовательно, и несоответствию текущей и заданой частот вращения, т.е к потере устойчивости.
Устранение этого недостатка обеспечивается в электроприводе воздей- ствкем сигнапа sign Z на величину скольжения S ротора. Если выполняется О S S, где S , - критическое скольжение, то асинхронный двигатель находится в двигательном режиме и знак развиваемого момента положительный. Если S ц,8 0, то момент отрицательный. С помощью сумматора 9 и блока 12 умножения, на входы которого поступают сигнал sign Z с вькода релейного элемента и сигнал S - с вькода зада цчика 10 скольжения, осуществляется дополнительное высокочастотное переключение сигнала по управляющему входу частоты преобразователя 2 частоты, что определяет возникновение в электроприводе скользящего режима с требуемыми динамическими и статическими показателями.
Устойчивость к любым изменениям задания частоты вращения w обеспечивается контуром управления скольжения ротора S, амплитуда выходного напряжения (или тока) преобразователя в зависимости от частоты вращения и нагрузки на валу регулируется конту- роп управления фазой вектора напряжения, поскольку высокочастотная инверсия напряжения преобразователя при наличии индуктивностей рассеяния практически сводится к эвивалентному уменьщению амплитуды подводимого к двигателю напряжения.
Блок 11 ограничения токов статора служит для защиты преобразователя 2 от перегрузок в случае срыва скользящего режима в системе или аварийных режимах. При превышении тока в ста- ,торе максимально допустимого значения закрываются все ключи преобразователя 2 частоты. I
Таким образом, введение в асинхронный электропривод блока 12 умножения обеспечивает дополнительное воздействие сигнала знака ошибки sign Z на контур регулирования частоты, благодаря чему в сравнении с известным решением повышается устойчивость в переходных режимах работы.
Формула изобретения
Асинхронный электропривод по авт. св. № 1365328, отличающий- с я тем, что, с целью повышения устойчивости работы в переходных режимах, введен блок умножения, а задат- чик скольжения вьтолнен в виде нелинейного элемента, реапизукщвго зависимость критич еского скольжения от частоты вращения, и снабжен входом, подключенным к выходу датчика частоты вращения, при этом один из входов блока умножения и его .выход подключены соответственно между выходом за- датчика скольжения и вторым входом сумматора, а другой вход блока умножения соединен с выходом релейного элемента.
| Асинхронный электропривод | 1986 |
|
SU1365328A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
