Устройство относится к электротехнике и предназначено для повышения энергетической эффективности работы асинхронного двигателя.
Общеизвестно, что одним из недостатков эксплуатируемых в настоящее время асинхронных двигателей с короткозамкнутым ротором является недостаточно высокая энергетическая эффективность их работы.
Наивысшие энергетические показатели асинхронного двигателя достигаются в номинальном режиме работы при постоянной величине номинального потокосцепления ротора и характеризуются наименьшим значением тока статора двигателя. В отличных от номинального режима работы при постоянной величине номинального потокосцепления ротора происходит снижение энергетической эффективности двигателя, сопровождающейся увеличением тока статора двигателя.
Для снижения тока статора двигателя в отличных от номинального режима работы следует соответствующим образом изменять величину потокосцепления ротора для уменьшения тока статора двигателя и, соответственно, увеличения энергетических показателей асинхронного двигателя.
Таким образом, энергетическая эффективность работы асинхронного двигателя характеризуется степенью потребления им тока статора, а его уменьшение способствует повышению энергетической эффективности двигателя.
Для повышения энергетической эффективности применяются различные устройства управления асинхронным двигателем.
Известно устройство векторного управления асинхронного двигателя с постоянной величиной потокосцепления ротора (Усольцев А.А. Частотное управление асинхронными двигателями/учебное пособие. СПб: СПбГУ ИТ-МО, 2006, - 94 с.).
Устройство векторного управления асинхронного двигателя содержит преобразователь частоты, первые входы которого подключены к трехфазной сети, а его выходы через датчики тока связаны с входами асинхронного двигателя, первый и второй преобразователи координат, каналы управления потокосцеплением и скоростью, блок модели роторной цепи и датчик скорости.
Канал управления потокосцеплением состоит из задатчика потока, первого и второго элементов сравнения, регулятора потока, а также первого регулятора тока. При этом выход задатчика потока связан с первым входом первого элемента сравнения, выход которого через регулятор потока соединен с первым входом второго элемента сравнения, выход которого подключен к входу первого регулятора тока, выход которого является выходом канала управления потокосцеплением.
Канал управления скоростью состоит из задатчика скорости, третьего и четвертого элементов сравнения, регулятора скорости, делителя и второго регулятора тока. При этом выход задатчика скорости подключен к первому входу третьего элемента сравнения, выход которого через регулятор скорости связан с первым входом делителя, выход которого соединен с первым входом четвертого элемента сравнения, выход которого подключен к входу второго регулятора тока, выход которого является выходом канала управления скоростью.
Выходы каналов управления потокосцеплением и скоростью через первые входы первого преобразователя координат подключены к вторым входам преобразователя частоты. Выходы второго преобразователя координат соединены с соответствующими вторыми входами второго и четвертого элементов сравнения, а также с первым и вторым входом блока модели роторной цепи, первый и второй выходы которого связаны со вторыми входами первого преобразователя координат и с первыми входами второго преобразователя координат, вторые входы которого подключены к выходам датчиков тока.
Третий выход блока модели роторной цепи соединен со вторым входом первого элемента сравнения и со вторым входом делителя.
Асинхронный двигатель связан с датчиком скорости, выход которого подключен к третьему входу блока модели роторной цепи и ко второму входу третьего элемента сравнения.
Устройство векторного управления асинхронного двигателя работает следующим образом.
Система управления асинхронного двигателя построена во вращающейся системе координат d-q, ось d которой ориентирована по направлению потокосцепления ротора ψR. Устройство векторного управления двигателем реализует закон регулирования с постоянной величиной потокосцепления ротора ψR=const. В соответствии с эти законом электромагнитный момент Μem на валу двигателя определяется выражением:

где zp - число пар полюсов двигателя;
KR - коэффициент электромагнитной связи ротора;
ψR - потокосцепление ротора;
iSq - проекция тока статора на ось q.
Таким образом, электромагнитный момент на валу двигателя и, соответственно, скорость вращения ротора определяется постоянным значением потокосцепления ротора ψR и величиной проекции тока статора iSq на вращающуюся систему координат d-q. Кроме этого, для управления двигателем необходимо знать положение вращающегося вектора потокосцепления  относительно неподвижной системы координат α-β, которое определяется углом поворота ϑ. В устройстве векторного управления реализован принцип регулирования с непосредственной ориентацией по полю, содержащий контуры регулирования по потокосцеплению и скорости.
относительно неподвижной системы координат α-β, которое определяется углом поворота ϑ. В устройстве векторного управления реализован принцип регулирования с непосредственной ориентацией по полю, содержащий контуры регулирования по потокосцеплению и скорости.
В устройстве векторного управления реализован классический принцип регулирования по отклонению (по ошибке). С помощью задатчика потокосцепления и задатчика скорости задаются требуемые значения потокосцепления ψ*R и скорости двигателя ωR. Первый и третий элементы сравнения определяют соответствующие значения ошибок регулирования по потокосцеплению ΔψR и по скорости Δω. Эти сигналы поступают на вход, соответственно, регулятора потока и регулятора скорости. На выходе регулятора потока формируется сигнал заданного значения проекции тока статора  на ось d вращающейся системы координат d-q.
на ось d вращающейся системы координат d-q.
На выходе делителя вычисляется сигнал заданного значения проекции тока статора  на ось q вращающейся системы координат d-q, полученного в результате деления сигналов заданного момента Μ* с выхода регулятора скорости и сигнала фактического значения потокосцепления ψR.
на ось q вращающейся системы координат d-q, полученного в результате деления сигналов заданного момента Μ* с выхода регулятора скорости и сигнала фактического значения потокосцепления ψR.
Второй и четвертый элементы сравнения вычисляют разности между заданными и фактическими значениями проекций тока статора  и
и  на оси d и q вращающейся системы координат d-q. Эти сигналы поступают на входы первого и второго регуляторов тока, в которых формируются сигналы заданных значений проекций напряжений
на оси d и q вращающейся системы координат d-q. Эти сигналы поступают на входы первого и второго регуляторов тока, в которых формируются сигналы заданных значений проекций напряжений  на вращающуюся систему координат d-q.
на вращающуюся систему координат d-q.
С помощью первого преобразователя координат происходит преобразование заданных значений проекций сигналов  из вращающейся системы координат d-q в заданные величины напряжений
из вращающейся системы координат d-q в заданные величины напряжений  для неподвижной трехфазной системы координат а-b-с. По величине этих сигналов, а также напряжению сети в преобразователе частоты происходит формирование трехфазной системы напряжений UA-UB-UC для асинхронного двигателя, удовлетворяющих заданным значениям потокосцепления
для неподвижной трехфазной системы координат а-b-с. По величине этих сигналов, а также напряжению сети в преобразователе частоты происходит формирование трехфазной системы напряжений UA-UB-UC для асинхронного двигателя, удовлетворяющих заданным значениям потокосцепления  и скорости вращения двигателя
и скорости вращения двигателя 
С помощью второго преобразователя координат происходит преобразование текущих значений токов двигателя из трехфазной неподвижной системы координат а-b-с во вращающуюся d-q. На выходе второго преобразователя координат формируются сигналы фактических значений тока двигателя iSd и iSq в проекциях на вращающиеся оси координат d-q, которые сравниваются с их заданными значениями  на входе второго и четвертого элементов сравнения.
на входе второго и четвертого элементов сравнения.
Для работы преобразователей координат необходимо знать текущее значение угла поворота ϑ между вращающейся {d-q) и неподвижной {а-b-с) системами координат. Сигналы sinϑ и cosϑ угла ϑ вычисляются с помощью блока модели роторной цепи и поступают на входы преобразователей координат для выполнения процедуры преобразования. Входными сигналами блока модели роторной цепи являются фактические значения токов двигателя iSd и iSq, полученные во втором блоке преобразования координат, а также текущее величина скорости двигателя ωR, измеренная с помощью датчика скорости, установленного на валу асинхронного двигателя.
Сигнал текущего значения скорости двигателя ωR поступает также на второй вход третьего элемента сравнения, где сравнивается с заданным значением ω*R. С помощью блока модели роторной цепи вычисляется текущее значение потокосцепленияψ ψR для канала управления потокосцеплением, а также для выполнения процедуры деления в делителе. Таким образом, устройство векторного управления обеспечивает требуемые значения электромагнитного момента Мem и скорости двигателя ωR в соответствии с заданными значениями потокосцепления ψ*R и скорости двигателя ω*R.
Выбор величины потокосцепления ротора ψR определяет энергетическую эффективность работы двигателя. Асинхронные двигатели разрабатываются в соответствии с критерием оптимизации энергетических параметров в номинальном режиме. Если предполагается продолжительная работа двигателя в номинальном режиме, то величина потокосцепления ротора выбирается равной его значению в номинальном режиме: ψ=ψном.
Достоинством известного устройства с постоянным значением потокосцепления ротора ψR является высокое значение энергетической эффективности, обусловленное минимальным значением потребляемого тока.
Однако достижение высокого значения энергетической эффективности асинхронного двигателя обеспечивается лишь при определенном (номинальном) режиме работы двигателя. Это обусловлено применением в известном устройстве системы управления, основанной на работе двигателя с постоянным значением потокосцепления ротора.
Отклонение режима работы двигателя от номинального вызывает увеличение потребляемого тока и снижение энергетической эффективности, что является недостатком известного устройства.
Наиболее близким к заявляемому решению по совокупности существенных признаков является устройство векторного управления асинхронного двигателя, основанное на работе с различной величиной потокосцепления, обеспечивающего повышение энергетической эффективности асинхронного двигателя в номинальном и отличном от номинального режимах работы [Калачев Ю.Н. SimInTex: моделирование в электроприводе. - М.: ДМК Пресс, 2019. - 93 с]. В устройстве векторного управления реализован принцип регулирования с косвенной ориентацией по полю, не содержащий контур стабилизации потокосцепления.
Устройство векторного управления асинхронного двигателя содержит преобразователь частоты, первые входы которого подключены к трехфазной сети, а его выходы через датчики тока связаны с входами асинхронного двигателя, два преобразователя координат, задатчик скорости, первый и второй регуляторы тока, первый, второй и третий элементы сравнения, регулятор скорости, вычислитель потокосцепления, вычислитель d - составляющей тока двигателя, вычислитель g - составляющей тока двигателя, вычислитель скольжения, вычислитель угла поворота и датчик скорости.
Задатчик скорости соединен с первым входом первого элемента сравнения, выход которого через регулятор скорости связан с первыми входами вычислителя q - составляющей тока двигателя и вычислителя скольжения, а также с входом вычислителя потокосцепления, выход которого подключен к вторым входам вычислителя q - составляющей тока двигателя и вычислителя скольжения, а также к входу вычислителя d - составляющей тока двигателя, выход которого соединен с первым входом второго элемента сравнения, выход которого через первый регулятор тока связан с первым входом первого преобразователя координат, выход вычислителя q - составляющей тока двигателя подключен к первому входу третьего элемента сравнения, выход которого через второй регулятор тока соединен со вторым входом первого преобразователя координат, выходы которого связаны со вторыми входами преобразователя частоты, выходы датчиков тока подключены к первым входам второго преобразователя координат, выходы которого соединены со вторыми входами второго и третьего элементов сравнения, выход вычислителя скольжения связан с первым входом вычислителя угла поворота, выходы которого подключены к вторым входам второго преобразователя координат и к третьим входам первого преобразователя координат, асинхронный двигатель связан с датчиком скорости, выход которого подключен к вторым входам вычислителя угла потока и первого элемента сравнения.
Устройство векторного управления асинхронного двигателя работает следующим образом.
Задатчик скорости задает сигнал заданной скорости вращения асинхронного двигателя ω*R, который с помощью первого элемента сравнения сравнивается с фактической скоростью двигателя ωR. Сигнал рассогласования (ошибки) по скорости Δω=ω*R-ωR с выхода первого элемента сравнения поступает на вход регулятора скорости, где из сигнала рассогласования по скорости Δω вырабатывается сигнал заданного значения электромагнитного момента  на валу двигателя. Сигнал
на валу двигателя. Сигнал  поступает на вход вычислителя потокосцепления, выполняющего функцию задатчика оптимального значения потокосцепления ротора ψR_опт по критерию минимального тока статора двигателя. Значение ψR_опт рассчитывается в соответствии с выражением:
поступает на вход вычислителя потокосцепления, выполняющего функцию задатчика оптимального значения потокосцепления ротора ψR_опт по критерию минимального тока статора двигателя. Значение ψR_опт рассчитывается в соответствии с выражением:

где LR - индуктивность цепи ротора асинхронного двигателя.
Сигнал ψR_опт поступает на вход вычислителя d - составляющей тока двигателя, а также на вторые входы вычислителя q - составляющей тока двигателя и вычислителя скольжения. В устройствах d- и q- составляющих тока двигателя рассчитываются заданные значения проекций тока статора двигателя на оси d-q вращающейся системы координат, обеспечивающие оптимальную величину потокосцепления ψR_опт по формулам:

где Lm - индуктивность намагничивания двигателя.
Формулы (3) получены при допущении линейной зависимости индуктивности намагничивания Lm от тока двигателя, а также без учета индуктивности рассеяния ротора LσR.
В устройстве вычисления скольжения рассчитывается скорость скольжения ротора Δω при оптимальном значении потокосцепления ψR_опт и заданном значении электромагнитного момента 

где RR - активное сопротивление роторной цепи двигателя. Второй и третий элементы сравнения вычисляют разности между заданными и фактическими значениями проекций тока статора  на оси d и q вращающейся системы координат d-q. Эти сигналы поступают на входы первого и второго регуляторов тока, в которых формируются сигналы
на оси d и q вращающейся системы координат d-q. Эти сигналы поступают на входы первого и второго регуляторов тока, в которых формируются сигналы  пропорциональные заданным значениям проекций токов на вращающуюся систему координат d-q.
пропорциональные заданным значениям проекций токов на вращающуюся систему координат d-q.
С помощью первого преобразователя координат происходит преобразование заданных значений сигналов  из вращающейся системы координат d-q в заданные величины сигналов
из вращающейся системы координат d-q в заданные величины сигналов  для неподвижной трехфазной системы координат а-b-с. По величине этих сигналов, а также напряжению сети в преобразователе частоты происходит формирование трехфазной системы напряжений UA-UB-UC для асинхронного двигателя, удовлетворяющих заданным оптимальным значениям потокосцепления ψR_опт и скорости вращения двигателя ω*R.
для неподвижной трехфазной системы координат а-b-с. По величине этих сигналов, а также напряжению сети в преобразователе частоты происходит формирование трехфазной системы напряжений UA-UB-UC для асинхронного двигателя, удовлетворяющих заданным оптимальным значениям потокосцепления ψR_опт и скорости вращения двигателя ω*R.
С помощью второго преобразователя координат происходит преобразование текущих значений токов двигателя из трехфазной неподвижной системы координат а-b-с во вращающуюся d-q. На выходе второго преобразователя координат формируются сигналы фактических значений тока двигателя iSd и iSq в проекциях на вращающиеся оси координат d-q, которые сравниваются с их заданными значениями  на входе второго и третьего элементов сравнения.
на входе второго и третьего элементов сравнения.
Для работы преобразователей координат необходимо знать текущее значение угла поворота ϑ между вращающейся (d-q) и неподвижной (а-b-с) системами координат. Сигналы sinϑ и cosϑ угла ϑ вычисляются с помощью вычислителя угла потокосцепления и поступают на входы преобразователей координат для выполнения процедуры преобразования.
Входными сигналами вычислителя угла потокосцепления являются скорость скольжения ротора Δω, рассчитанная в вычислителе скольжения, а также текущее значение скорости двигателя ωR, измеренное с помощью датчика скорости, установленного на валу асинхронного двигателя. Угол положения потокосцепления ротора ϑ относительно неподвижной системы координат определяется как результат интегрирования входных сигналов:

Сигнал текущего значения скорости двигателя ωR поступает также на второй вход первого элемента сравнения, где сравнивается с заданным значением ω*R. Таким образом, устройство векторного управления обеспечивает требуемые значения электромагнитного момента Мem и скорости двигателя ωR в соответствии с оптимальными значениями потокосцепления ψR_опт.
Достоинством известного устройства с оптимальным значением потокосцепления ротора ψR_опт является высокое значение энергетической эффективности, обусловленное минимальным значением потребляемого тока. При этом высокая эффективность устройства обеспечивается не только в номинальном, но и отличных от номинального режимах работы двигателя.
Однако достижение высокого значения энергетической эффективности асинхронного двигателя обеспечивается в предположении о линейной зависимости индуктивности намагничивания Lm от тока статора двигателя, а также без учета индуктивности рассеяния ротора LσR. Однако индуктивность намагничивания Lm является линейной лишь на ограниченном отрезке кривой намагничивания. Кроме того, при определении величины оптимального значениями потокосцепления ψR_опт предполагается постоянство электрических характеристик и параметров асинхронного двигателя. На практике параметры двигателя, входящие в выражения для определения ψR_опт не являются постоянными, а зависят от многих факторов, например, тока статора двигателя или температуры окружающей среды. Эти обстоятельства вносят погрешность в процесс регулирования и снижают энергетическую эффективность двигателя, что является недостатком известного устройства.
Задача, решаемая изобретением, заключается в разработке устройства экстремального управления асинхронного двигателя, обеспечивающего повышение энергетической эффективности путем уменьшения тока статора двигателя до экстремально низких значений за счет управления величиной потокосцепления ротора.
Для решения поставленной задачи в устройство векторного управления асинхронного двигателя, содержащее преобразователь частоты, первые входы которого подключены к трехфазной сети, а его выходы через датчики тока связаны с входами асинхронного двигателя, два преобразователя координат, задатчик скорости, первый и второй регуляторы тока, первый, второй и третий элементы сравнения, регулятор скорости, вычислитель d - составляющей тока двигателя, вычислитель q - составляющей тока двигателя, вычислитель скольжения, вычислитель угла поворота и датчик скорости, при этом задатчик скорости соединен с первым входом первого элемента сравнения, выход которого через регулятор скорости связан с первыми входами вычислителя q-составляющей тока двигателя и вычислителя скольжения, вторые входы вычислителя q - составляющей тока двигателя и вычислителя скольжения, а также вход вычислителя d - составляющей тока двигателя соединены между собой, выход вычислителя d - составляющей тока двигателя соединен с первым входом второго элемента сравнения, выход которого через первый регулятор тока связан с первым входом первого преобразователя координат, выход вычислителя q - составляющей тока двигателя подключен к первому входу третьего элемента сравнения, выход которого через второй регулятор тока соединен со вторым входом первого преобразователя координат, выходы которого связаны со вторыми входами преобразователя частоты, выходы датчиков тока подключены к первым входам второго преобразователя координат, выходы которого соединены со вторыми входами второго и третьего элементов сравнения, выход вычислителя скольжения связан с первым входом вычислителя угла поворота, выходы которого подключены к вторым входам второго преобразователя координат и к третьим входам первого преобразователя координат, асинхронный двигатель связан с датчиком скорости, выход которого подключен к вторым входам вычислителя угла потока и первого элемента сравнения, введены блок вычисления тока статора и блок экстремального регулирования, предназначенные для получения экстремально низких значений тока статора двигателя методом шагового поиска, блок экстремального регулирования содержит блок линии задержки, представляющий собой элемент памяти, блок задатчика зоны нечувствительности, представляющий собой источник напряжения, сигнал которого определяет зону нечувствительности δ тока двигателя при его регулировании, четвертый и пятый элементы сравнения, сигнум-реле и блок управления потокосцеплением, причем в блоке экстремального регулирования объединенные вход блока линии задержки и первый вход четвертого элемента сравнения являются его входом, выход блока линии задержки подключен к второму входу четвертого элемента сравнения, выход которого связан с первым входом пятого элемента сравнения, второй вход пятого элемента сравнения связан с выходом блока задатчика зоны нечувствительности, выход пятого элемента сравнения через сигнум-реле связан с входом блока управления потокосцеплением, выход которого является выходом блока экстремального регулирования, блок вычисления тока статора предназначен для вычисления действующего значения тока статора двигателя и содержит первый и второй умножители, сумматор и вычислитель квадратного корня, причем в блоке вычисления тока статора объединенные входы первого и второго умножителей являются его входами, выходы умножителей соединены с входами сумматора, выход которого связан с входом вычислителя квадратного корня, выход которого является выходом блока вычисления тока статора, выходы первого и второго регуляторов тока подключены к первому и второму входам блока вычисления тока статора, выход которого через блок экстремального регулирования связан с входом вычислителя d - составляющей тока двигателя, вторыми входами вычислителя q - составляющей тока двигателя и вычислителя скольжения, а работа сигнум реле осуществляется в соответствии с выражением:

где z - сигнал на входе сигнум-реле, а ±1 - сигнал на его выходе;
ΔQi-1 - приращение тока двигателя на (i-1) - м периоде вычисления;
δ - величина зоны нечувствительности;
Q(xi-1) и Q(xi-2) - значения тока двигателя, соответственно, на (i-1)-м и (i-2) - м периоде вычисления.
Введение в устройство векторного управления асинхронного двигателя блока вычисления тока статора и блока экстремального регулирования, предназначенных для получения экстремально низких значений тока двигателя методом шагового поиска, блок экстремального регулирования содержит блок линии задержки, представляющий собой элемент памяти, блок задатчика зоны нечувствительности, представляющий собой источник напряжения, сигнал которого определяет зону нечувствительности δ тока статора двигателя при его регулировании, четвертый и пятый элементы сравнения, сигнум-реле и блок управления потокосцеплением, блок вычисления тока статора, предназначенный для вычисления действующего значения тока статора, содержит первый и второй умножители, сумматор и вычислитель квадратного корня и образование новых взаимосвязей между элементами устройства отличает заявляемое решение от прототипа. Наличие существенных отличительных признаков в заявляемом решении свидетельствует о его соответствии критерию патентоспособности «новизна».
Введение в устройство векторного управления асинхронного двигателя блока вычисления тока статора и блока экстремального регулирования, предназначенных для получения экстремально низких значений тока двигателя методом шагового поиска, блок экстремального регулирования содержит блок линии задержки, представляющий собой элемент памяти, блок задатчика зоны нечувствительности, представляющий собой источник напряжения, сигнал которого определяет зону нечувствительности δ тока статора двигателя при его регулировании, четвертый и пятый элементы сравнения, сигнум-реле и блок управления потокосцеплением, блок вычисления тока статора, предназначенный для вычисления действующего значения тока статора, содержит первый и второй умножители, сумматор и вычислитель квадратного корня и образование новых взаимосвязей между элементами устройства приводит к снижению тока статора двигателя до экстремально низких значений за счет управления величиной потокосцепления ротора.
Это обусловлено тем, что в заявляемом устройстве экстремальная низкая величина тока статора двигателя определяется не при фиксированном (например, номинальном) значении потокосцепления, а при его варьированных значениях. Такое воздействие приводит к регулированию с экстремальным значением потокосцепления ротора в зависимости от режима работы двигателя, и, как следствие, к экстремально низкому значению тока статора. Кроме того, достижение экстремально низкого значения тока двигателя приводит к снижению электрических потерь и повышению коэффициента полезного действия устройства экстремального управления асинхронного двигателя.
Причинно-следственная связь «Введение в устройство векторного управления асинхронного двигателя блока вычисления тока статора и блока экстремального регулирования, предназначенных для получения экстремально низких значений тока статора двигателя методом шагового поиска, блок экстремального регулирования содержит блок линии задержки, представляющий собой элемент памяти, блок задатчика зоны нечувствительности, представляющий собой источник напряжения, сигнал которого определяет зону нечувствительности δ тока двигателя при его регулировании, четвертый и пятый элементы сравнения, сигнум-реле и блок управления потокосцеплением, блок вычисления тока статора, предназначенный для вычисления действующего значения тока статора, содержит первый и второй умножители, сумматор и вычислитель квадратного корня и образование новых взаимосвязей между элементами устройства приводит к снижению тока статора двигателя до экстремально низких значений за счет управления величиной потокосцепления ротора двигателя» не обнаружена в уровне техники и явным образом не следует из него, что свидетельствует о ее новизне. Наличие новой причинно-следственной связи, проявляемой в заявляемом устройстве, свидетельствует о соответствии заявляемого решения критерию патентоспособности изобретения «изобретательский уровень».
На фиг. 1 представлена схема устройства экстремального управления асинхронного двигателя, позволяющая раскрыть работоспособность и «промышленную применимость» заявляемого решения.
Устройство экстремального управления асинхронного двигателя содержит преобразователь частоты 1, асинхронный двигатель 2, задатчик скорости 3, регулятор скорости 4, блок экстремального регулирования 5, блок вычисления тока статора 6, вычислитель d - составляющей тока двигателя 7, вычислитель q - составляющей тока двигателя 8, первый 9 и второй 10 регуляторы тока, вычислитель скольжения 11, вычислитель угла поворота 12, первый преобразователь координат 13, второй преобразователь координат 14, первый элемент сравнения 15, второй элемент сравнения 16, третий элемент сравнения 17, датчики тока 18 и датчик скорости 19.
Блок экстремального регулирования 5 предназначен для получения экстремально низких значений тока двигателя методом шагового поиска и содержит блок линии задержки 20, блок задатчика зоны нечувствительности 21, четвертый элемент сравнения 22, пятый элемент сравнения 23, сигнум-реле 24 и блок управления потокосцеплением 25.
Блок линии задержки 20, представлет собой элемент памяти. Блок задатчика зоны нечувствительности 21 является источником напряжения, сигнал которого определяет зону нечувствительности δ тока статора двигателя при его регулировании, т.е. диапазон его возможных значений.
Объединенные вход блока линии задержки 20 и первый вход четвертого элемента сравнения 22 являются входом блока экстремального регулирования 5. Выход блока линии задержки 20 подключен к второму входу четвертого элемента сравнения 22, выход которого связан с первым входом второго элемента сравнения 23. Второй вход пятого элемента сравнения 23 связан с выходом блока задатчика зоны нечувствительности 21. Выход пятого элемента сравнения 23 через сигнум-реле 24 связан с входом блока управления потокосцеплением 25, выход которого является выходом блока экстремального регулирования 5.
В блоке вычисления тока статора 6, предназначенного для вычисления действующего значения тока статора, первые и вторые входы первого и второго умножителей 26, 27 объединены между собой и являются его первым и вторым входами. Выходы умножителей 26, 27 соединены с входами сумматора 28, выход которого связан с входом вычислителя квадратного корня 29, выход которого является выходом блока вычисления тока статора 6. Вход преобразователя частоты 1 подключены к трехфазной сети, а его выходы через датчики тока 18 связаны с входами асинхронного двигателя 2.
Задатчик скорости 3 соединен с первым входом первого элемента сравнения 15, выход которого через регулятор скорости 4 связан с первыми входами вычислителя q - составляющей тока двигателя 8 и вычислителя скольжения 11.
Выход блока экстремального регулирования 5 подключен к вторым входам вычислителя q - составляющей тока двигателя 8 и вычислителя скольжения 11, а также к входу вычислителя d - составляющей тока двигателя 7.
Выход вычислителя d - составляющей тока двигателя 7 соединен с первым входом второго элемента сравнения 16, выход которого через первый регулятор тока 9 связан с первым входом первого преобразователя координат 13.
Выход вычислителя q - составляющей тока двигателя 8 подключен к первому входу третьего элемента сравнения 17, выход которого через второй регулятор тока 10 соединен со вторым входом первого преобразователя координат 13, выходы которого связаны со вторыми входами преобразователя частоты 1.
Выходы датчиков тока 18 подключены к первым входам второго преобразователя координат 14, выходы которого соединены со вторыми входами второго 16 и третьего 17 элементов сравнения.
Выход вычислителя скольжения 11 связан с первым входом вычислителя угла поворота 12, выходы которого подключены ко вторым входам второго преобразователя координат 14 и к третьим входам первого преобразователя координат 13.
Выходы первого 9 и второго 10 регуляторов тока соединены со входами блока вычисления тока статора 6, выход которого подключен к входу блока экстремального регулирования 5.
Асинхронный двигатель 2 связан с датчиком скорости 19, выход которого подключен к вторым входам вычислителя угла потока 12 и первого элемента сравнения 15.
Устройство оптимального управления асинхронного двигателя работает следующим образом.
Задатчик скорости 3 задает сигнал заданной скорости вращения асинхронного двигателя ωR, который с помощью первого элемента сравнения 15 сравнивается с фактической скоростью двигателя ωR. Сигнал рассогласования (ошибки) по скорости Δω=ω*R-ωR с выхода первого элемента сравнения 15 поступает на вход регулятора скорости 4, где из сигнала рассогласования по скорости Δω вырабатывается сигнал заданного значения электромагнитного момента  на валу двигателя.
на валу двигателя.
Сигнал экстремального значения потокосцепления  с выхода блока экстремального регулирования 5 поступает на вход вычислителя d - составляющей тока двигателя 7 и на второй вход вычислителя q - составляющей тока двигателя 8, а также на второй вход вычислителя скольжения 11. В вычислителях тока двигателя 7, 8 рассчитываются заданные значения проекций тока статора двигателя на оси d-q вращающейся системы координат, обеспечивающие экстремальную величину потокосцепления
с выхода блока экстремального регулирования 5 поступает на вход вычислителя d - составляющей тока двигателя 7 и на второй вход вычислителя q - составляющей тока двигателя 8, а также на второй вход вычислителя скольжения 11. В вычислителях тока двигателя 7, 8 рассчитываются заданные значения проекций тока статора двигателя на оси d-q вращающейся системы координат, обеспечивающие экстремальную величину потокосцепления  по формулам:
по формулам:

где Lm - индуктивность намагничивания двигателя.
В устройстве вычисления скольжения 11 рассчитывается скорость скольжения ротора Δω при экстремальном значении потокосцепления  и заданном значении электромагнитного момента
и заданном значении электромагнитного момента 

где RR - активное сопротивление роторной цепи двигателя.
Второй 16 и третий 17 элементы сравнения вычисляют разности между заданными и фактическими значениями проекций тока статора 
 на оси d и q вращающейся системы координат d-q. Эти сигналы поступают на входы первого 9 и второго 10 регуляторов тока, в которых формируются сигналы заданных значений проекций
на оси d и q вращающейся системы координат d-q. Эти сигналы поступают на входы первого 9 и второго 10 регуляторов тока, в которых формируются сигналы заданных значений проекций  на вращающуюся систему координат d-q.
на вращающуюся систему координат d-q.
С помощью первого преобразователя координат 13 происходит преобразование заданных значений сигналов  из вращающейся системы координат d-q в заданные величины напряжений
из вращающейся системы координат d-q в заданные величины напряжений  для неподвижной трехфазной системы координат а-b-с. По величине этих сигналов, а также напряжению сети в преобразователе частоты 1 происходит формирование трехфазной системы напряжений UA-UB-UC для асинхронного двигателя 2, удовлетворяющих заданным экстремальным значениям потокосцепления
для неподвижной трехфазной системы координат а-b-с. По величине этих сигналов, а также напряжению сети в преобразователе частоты 1 происходит формирование трехфазной системы напряжений UA-UB-UC для асинхронного двигателя 2, удовлетворяющих заданным экстремальным значениям потокосцепления  и скорости вращения двигателя
и скорости вращения двигателя 
С помощью второго преобразователя координат 14 происходит преобразование текущих значений токов асинхронного двигателя 2 из трехфазной неподвижной системы координат а-b-с во вращающуюся d-q. На выходе второго преобразователя координат 14 формируются сигналы фактических значений тока двигателя iSd и iSq в проекциях на вращающиеся оси координат d-q, которые сравниваются с их заданными значениями  на входе второго 16 и третьего 17 элементов сравнения.
на входе второго 16 и третьего 17 элементов сравнения.
Для работы преобразователей координат необходимо знать текущее значение угла поворота ϑ между вращающейся (d-q) и неподвижной (а-b-с) системами координат. Сигналы sinϑ и coϑ угла ϑ вычисляются с помощью вычислителя угла потокосцепления 12 и поступают на входы преобразователей координат 13, 14 для выполнения процедуры преобразования координат.
Входными сигналами вычислителя угла потокосцепления 12 являются скорость скольжения ротора Δω, рассчитанная в вычислителе скольжения 11, а также текущее значение скорости двигателя ωR, измеренное с помощью датчика скорости 19, установленного на роторе асинхронного двигателя 2. Угол положения потокосцепления ротора ϑ относительно неподвижной системы координат определяется как результат интегрирования входных сигналов:

Сигнал текущего значения скорости двигателя ωR поступает также на второй вход первого элемента сравнения 15, где сравнивается с заданным значением ω*R.
В блоке вычислителя тока статора происходит вычисление текущего значения сигнала тока статора  по текущим значениям сигналов проекций этого тока
по текущим значениям сигналов проекций этого тока  на оси координат d-q по формуле:
на оси координат d-q по формуле:

В соответствии с формулой (9), возведение во вторую степень сигналов  осуществляется с помощью умножителей 26 и 27, а сложение - с помощью сумматора 28, сигнал формируется на выходе вычислителя квадратного корня 29.
осуществляется с помощью умножителей 26 и 27, а сложение - с помощью сумматора 28, сигнал формируется на выходе вычислителя квадратного корня 29.
Текущее значение тока статора iSi определяет величину сигнала потокосцепления ротора ψR(i-1) за предшествующий период времени. Полученное значение потокосцепления характеризует показатель качества регулирования Q(xi-1) системы управления на предыдущем i-1 периоде вычисления.
Сигнал Q(xi-1), пропорциональный току статора двигателя, рассчитывается в блоке вычисления тока статора 6 и поступает на вход блока экстремального регулирования 5, осуществляющего поиск потокосцепления ψR вблизи его экстремальных значений  и поддерживает его вблизи этих начений. Поиск
и поддерживает его вблизи этих начений. Поиск  осуществляется за счет ступенчатого изменения сигнала на выходе блока экстремального регулирования на величину Δψ как в сторону увеличения, так и уменьшения.
осуществляется за счет ступенчатого изменения сигнала на выходе блока экстремального регулирования на величину Δψ как в сторону увеличения, так и уменьшения.
Алгоритм поиска экстремального значения  заключается в следующем: при уменьшении тока статора iS двигателя сохраняется приращение потокосцепления ΔψR, выбранное на предыдущем шаге вычисления, а при увеличении iS приращение -ΔψR выбирается с противоположным знаком.
заключается в следующем: при уменьшении тока статора iS двигателя сохраняется приращение потокосцепления ΔψR, выбранное на предыдущем шаге вычисления, а при увеличении iS приращение -ΔψR выбирается с противоположным знаком.
В процессе регулирования диапазон возможных значений тока статора iS отличается от экстремального  на заданную величину зоны нечувствительности δ и находится в диапазоне значений от
на заданную величину зоны нечувствительности δ и находится в диапазоне значений от 
Сигнал Q(xi-1), пропорциональный току статора двигателя iS, поступает в блок экстремального регулирования 5 на вход линии задержки 20 и на первый вход четвертого элемента сравнения 22. В блоке задержки 20 сигнал Q(xi-1) сохраняется на весь период времени Т, а на следующем периоде вычисления принимает значение Q(xi-2), которое поступает на вход пятого элемента сравнения 23. Четвертый элемент сравнения 22 выполняет сравнение сигналов Q(xi-1) и Q(xi-2), разность которых определяет величину приращения тока статора ΔQi-1 на i-1 интервале (периоде) вычисления.

Пятый элемент сравнения 23 производит вычисление разности сигналов:

Если полученная разность z меньше величины зоны нечувствительности δ, задаваемой блоком задатчика зоны нечувствительности 21 экстремального регулятора 5, то величина тока статора двигателя находится в заданном диапазоне экстремальных значений  Принцип работы экстремального регулирования основан на том, что после попадания значения тока статора двигателя в зону нечувствительности δ блок экстремального регулирования 5 поддерживает его значение в этом диапазоне, т.е. поисковая система начинает циклическое движение в области экстремальных значений тока статора двигателя
Принцип работы экстремального регулирования основан на том, что после попадания значения тока статора двигателя в зону нечувствительности δ блок экстремального регулирования 5 поддерживает его значение в этом диапазоне, т.е. поисковая система начинает циклическое движение в области экстремальных значений тока статора двигателя 
Разностный сигнал z поступает на вход сигнум-реле 24, где анализируется его значение. Выходной сигнал сигнум-реле принимает одно из двух возможных значений (+1 или -1), которые формируются в зависимости от величины разности z в соответствии с выражением:

При значении sign z=+1 на i -м шаге поиска выбирается тоже значение приращения величины потокосцепления ΔψR (направление поиска), что и на предыдущем (i-1)-м шаге, а при значении sign z=-1 на i-м шаге поиска выбирается противоположное по знаку приращение потокосцепления -ΔψR.
Сигнал с выхода сигнум-реле 24 поступает на вход блока управления потокосцеплением 25, в котором происходит формирование сигнала управлением потокосцеплением ±Δψупр(i) на i-м шаге управления в зависимости от знака сигнала signz. В случае, если sign z=+1 приращение сигнала потокосцепления ΔψR не изменяется по сравнению с предыдущим (i-1)-м шагом поиска, если же signz=-1, то приращение сигнала потокосцепления -ΔψR выбирается с противоположным знаком.
Управление каналом потокосцепления осуществляется в соответствии с алгоритмом:

Таким образом, устройство экстремального управления асинхронного двигателя обеспечивает экстремально низкие значения тока двигателя в диапазоне значений от  в соответствии с экстремальными значениями потокосцепления
в соответствии с экстремальными значениями потокосцепления 
На фиг. 2 представлены результаты математического моделирования устройства экстремального управления асинхронного двигателя АНЭ 225 L4 мощностью 55 кВт при электромагнитном моменте Мem=60 Н⋅м. Устройство выполняет пошаговое изменение величины потокосцепления ротора ψR. В соответствии с изменением ψR происходит уменьшение тока статора IS до экстремально низкого значения IS=38,06 А. При t>50 с происходит стабилизация работы устройства управления, после которого значение потокосцепления поддерживается на уровне оптимального значении  определяемое сигналом
определяемое сигналом  экстремального регулятора.
экстремального регулятора.
Результаты математического моделирования показывают, что использование заявляемого устройства уменьшает ток статора асинхронного двигателя, одновременно с этим повышается коэффициент полезного действия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2023 |
|
RU2819147C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2524507C1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |


Изобретение относится к устройству управления электродвигателями с помощью векторного управления. Устройство экстремального управления асинхронного двигателя содержит преобразователь частоты, два преобразователя координат, задатчик скорости, первый и второй регуляторы тока, первый, второй и третий элементы сравнения, регулятор скорости, вычислитель d-составляющей тока двигателя, вычислитель q-составляющей тока двигателя, вычислитель скольжения, вычислитель угла поворота и датчик скорости. При этом в устройство введены блок вычисления тока статора и блок экстремального регулирования, предназначенные для получения экстремально низких значений тока статора двигателя методом шагового поиска. Блок экстремального регулирования содержит блок линии задержки, блок задатчика зоны нечувствительности, сигнал которого определяет зону нечувствительности δ тока двигателя при его регулировании, четвертый и пятый элементы сравнения, сигнум-реле и блок управления потокосцеплением. Блок вычисления тока статора предназначен для вычисления действующего значения тока статора двигателя и содержит первый и второй умножители, сумматор и вычислитель квадратного корня. Технический результат заключается в повышении энергетической эффективности работы асинхронного двигателя путем уменьшения тока статора двигателя до экстремально низких значений. 2 ил.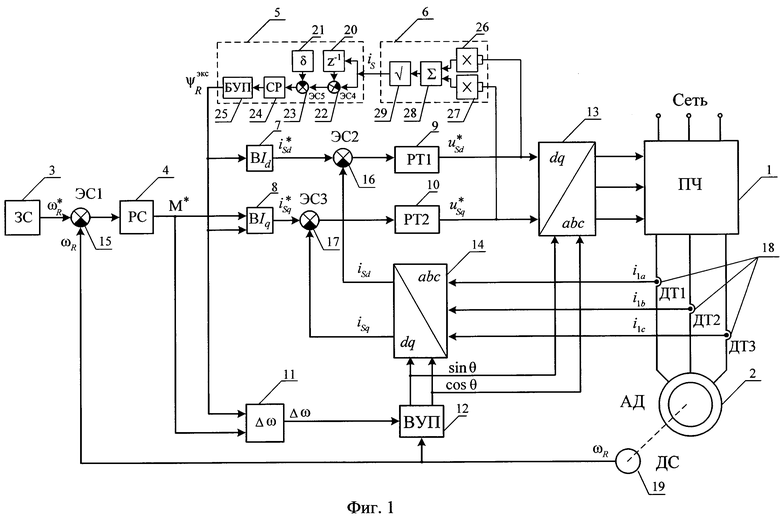
Устройство экстремального управления асинхронного двигателя, содержащее преобразователь частоты, первые входы которого подключены к трехфазной сети, а его выходы через датчики тока связаны с входами асинхронного двигателя, два преобразователя координат, задатчик скорости, первый и второй регуляторы тока, первый, второй и третий элементы сравнения, регулятор скорости, вычислитель d-составляющей тока двигателя, вычислитель q-составляющей тока двигателя, вычислитель скольжения, вычислитель угла поворота и датчик скорости, при этом задатчик скорости соединен с первым входом первого элемента сравнения, выход которого через регулятор скорости связан с первыми входами вычислителя q-составляющей тока двигателя и вычислителя скольжения, вторые входы вычислителя q-составляющей тока двигателя и вычислителя скольжения, а также вход вычислителя d-составляющей тока двигателя соединены между собой, выход вычислителя d-составляющей тока двигателя соединен с первым входом второго элемента сравнения, выход которого через первый регулятор тока связан с первым входом первого преобразователя координат, выход вычислителя q-составляющей тока двигателя подключен к первому входу третьего элемента сравнения, выход которого через второй регулятор тока соединен со вторым входом первого преобразователя координат, выходы которого связаны со вторыми входами преобразователя частоты, выходы датчиков тока подключены к первым входам второго преобразователя координат, выходы которого соединены со вторыми входами второго и третьего элементов сравнения, выход вычислителя скольжения связан с первым входом вычислителя угла поворота, выходы которого подключены к вторым входам второго преобразователя координат и к третьим входам первого преобразователя координат, асинхронный двигатель связан с датчиком скорости, выход которого подключен к вторым входам вычислителя угла поворота и первого элемента сравнения, отличающееся тем, что в него введены блок вычисления тока статора и блок экстремального регулирования, предназначенные для получения экстремально низких значений тока статора двигателя методом шагового поиска, блок экстремального регулирования содержит блок линии задержки, представляющий собой элемент памяти, блок задатчика зоны нечувствительности, представляющий собой источник напряжения, сигнал которого определяет зону нечувствительности δ тока двигателя при его регулировании, четвертый и пятый элементы сравнения, сигнум-реле и блок управления потокосцеплением, причем в блоке экстремального регулирования объединенные вход блока линии задержки и первый вход четвертого элемента сравнения являются его входом, выход блока линии задержки подключен к второму входу четвертого элемента сравнения, выход которого связан с первым входом пятого элемента сравнения, второй вход второго элемента сравнения связан с выходом блока задатчика зоны нечувствительности, выход пятого элемента сравнения через сигнум-реле связан с входом блока управления потокосцеплением, выход которого является выходом блока экстремального регулирования, блок вычисления тока статора предназначен для вычисления действующего значения тока статора двигателя и содержит первый и второй умножители, сумматор и вычислитель квадратного корня, причем в блоке вычисления тока статора объединенные входы первого и второго умножителей являются его входами, выходы умножителей соединены с входами сумматора, выход которого связан с входом вычислителя квадратного корня, выход которого является выходом блока вычисления тока статора, выходы первого и второго регуляторов тока подключены к первому и второму входам блока вычисления тока статора, выход которого через блок экстремального регулирования связан с входом вычислителя d-составляющей тока двигателя, вторыми входами вычислителя q-составляющей тока двигателя и вычислителя скольжения, а работа сигнум-реле осуществляется в соответствии с выражением:


где z - сигнал на входе сигнум-реле, а ±1 - сигнал на его выходе;
ΔQi-1 - приращение тока двигателя на (i-1) - м периоде вычисления;
δ - величина зоны нечувствительности;
Q(xi-1) и Q(xi-2) - значения тока двигателя соответственно на (i-1)-м и (i-2)-м периоде вычисления.
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| CN 102594250 A, 18.07.2012. | |||

