, 2..Электропривод по п. 1, о т личающийс я тем, что в него введены релейный элемент, схема совпадения и блок инвертирования фазных токов, а блок формирования абсолютного скольжения содержит формирователь величины абсолютного скольжения, датчик знака абсолютного скольжения и блок умножения, при
этом блок инвертирования фазньах тоI
ков включен между выходами формирователя фазных токов и управляющими входами преобразователя частоты, управляющий вход блока инвертиропания фазнЕлх токов соединен через последовательно включенные схему совпадения и релейный элемент с выходом блока задания управляющего сигнала, входы формирователя величины абсолютного скольжения и датчика знака абсолютного скольжения объединены и являются входами блока формирования абсолютного скольжения, а их выходы соединены с входами блока умножения, выход которогоявляется выходом блока формирования абсолютного скольжения, выход датчика знака абсолютного скольжения соединен с другим входом схемы совпадения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| Электропривод переменного тока | 1980 |
|
SU1007169A1 |
| Устройство для регулирования скорости асинхронного двигателя | 1982 |
|
SU1064411A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Устройство управления асинхронным двигателем | 2019 |
|
RU2723671C1 |
| Электропривод | 1987 |
|
SU1436263A1 |
| Электропривод переменного тока | 1988 |
|
SU1577060A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
1. ЧАСТОТНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный двигатель, подключенный к пр0обраэователю частоты, формирователь фазных токов, св.язанный выходом с управляющими входами преобразователя частоты, а входом - с выходом €л ка суммирования, входы которого сое динены с выходом измерителя частоты вращения ротора и формирователем абсолютного- скольжения, а также блок задания управляющего сигнала, отличающийся, тем, что, с целью повышения быстродействия и увеличения диапазона регулирования частоты вращения, в него введены дифференцирующее звено первого порядка и формирователь производной управляющего сигнала,а блок суммирования снабжен третьим вхоДом, при этом выход блока задания управляющего сигнала соединен с входом дифференцирующего звена первого, порядка, подклю-; ченного своим выходом к первому входу формирователя фазных токов и блоку формирования абсолютного cкoJ ьжeния, выходы блока задания управляющего сигнала и блока (дифференцирующего звена первого порядка подключены к входам формирователя производной управляющего сигнала, выход которого соединен с третьим входом сумматора. S « ЯП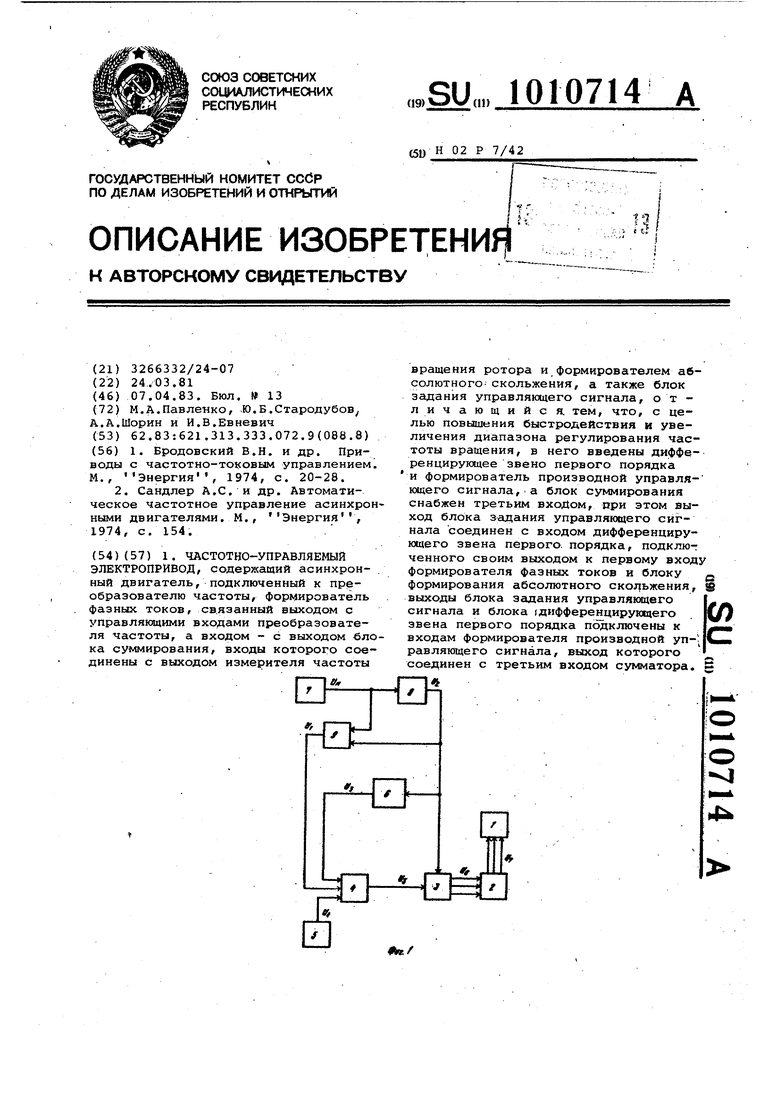
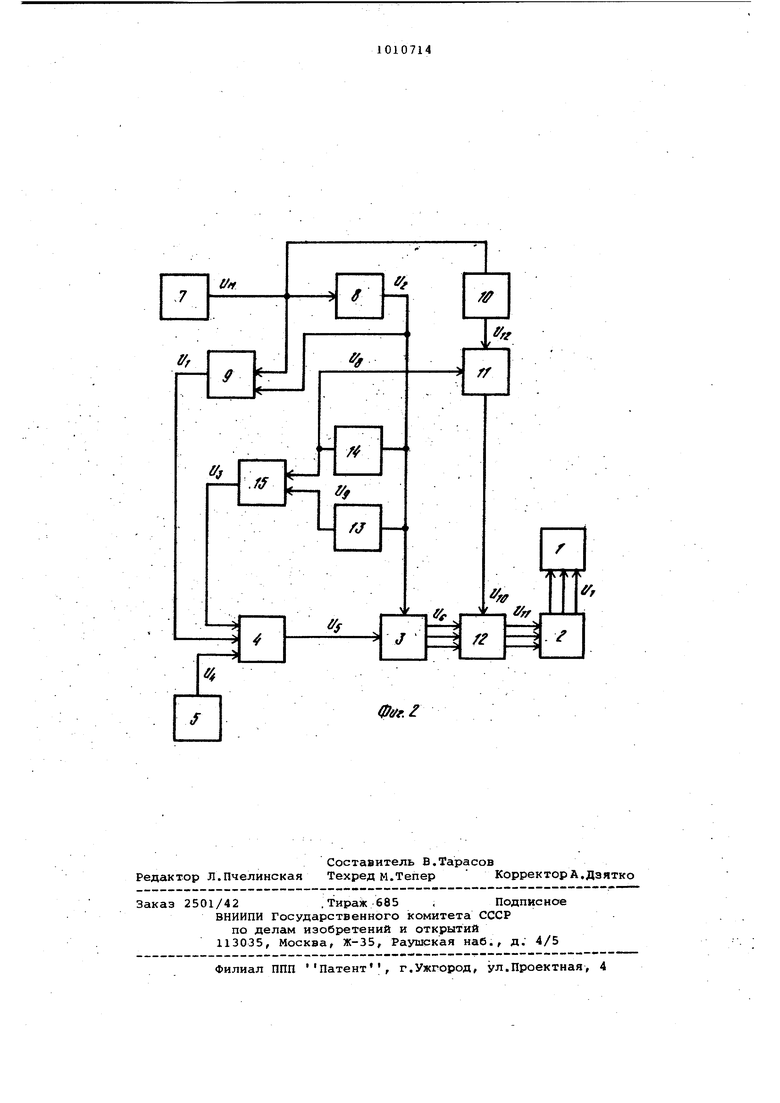
Изобретение относится к электротехнике и может найти применение в электроприводе переменного тока для управления асинхронными двигателями по минимуму тока, . Известен частотно-управляемый электропривод, который состоит из блока задания активной и реактивной составляняцих тока статора, измерителя угла положения ротора, блока зада ния величины абсолютного скольжения и формирователя трехфазных токов. Данное устройство реализует закон управления асинхронным двигателем с постоянным потокосцеплением ротора 1. Однако указанный привод, имея вы сокое быстродействие, характеризует ся низкими энергетическими характеристиками и сложностью схем реализа ции. Наиболее близок к предлагаемому частотно-управляемый электропривод. который содержит асинхронный двигатель, подключаемый к преобразователю частоты, формирователь фазных токов, связанный выходами с управля щими входами преобразователя частоты, а входом - с выходом блока суммирования, входы которого соединены с выходом измерителя частоты вращения ротора и формирователем абсолют ного скольжения, а также блок задания управлякядего сигнала, соединенный с блоками формирования абсолютного скольжения и формирователем фа ных токов 2. Известный электропривод, обеспечивая высокие энергетические показа тели, имеет относительно низкое быс родвйствие и ограниченный диапазон 1регулирования. Цель изобретения - повышение быс родействия и увеличение диапазона р гулирования частоты вращения. Поставленная целью достигается тем, что в частотно-управляемый электропривод, содержащий асинхронны.й двигатель, подключенный к преобразователю частоты, формирователь фазных токов, связанный выходом с управляющими входами преобразователя частоты, а входом - с выходом блока суммирования, входы которого соединены с выходом измерителя частоты вращения ротора и формирователем абсолютного скольжения, а также блок задания управляющего сигнала, введены дифференцирующие .звено первого поряд1ка и формирователь производной управляющего сигнала, а блок суммирования, снабжен третьим входом, при этом выход блока задания управляющего сигнал.а соединен с входом дифференцирующего звена первого порядка, подклю-. ченноГо своим выходом к первому входу формирователя фазных токов и блрку формирования абсолютного скольжения, выходы блока задания управляющего сигнала и блока дифференцирующего звена первого.порядка подключены к входам формирователя производной управляющего сигнала, выход которого соединен с третьим входом сумматора. .Кроме того, в частотно-управляемый электропривод введен релейный элемент, схема совпадения и блок инвертирования фазных токов, а блок формирования абсолютного скольжения содержит формирователь величины абсолютного скольжения, задатчик .знака абсолютного скольжения и блок умножения, при этом блок инвертирования фазных токов включен между выходами формирователя фазных токов и управляющими входами преобразователя частоты, управляющий вход блока инвертирования фазных токов соединен через последовательно выполненные схему совпадения и релейный элемент с выходом блока задания управляющего сигнала, входы формирователя величи ны абсолютного скольжения и датчика знака абсолютного скольжения объеди нены и являются входами блока формирования абсолютного скольжения, а их нБцхады соединены с входами блока умножения, выход которого является выходом блока формирования абсолютного скольжения, выход датчика знака абсолютного скольжения соединен с другим входом схемы совпадения. На фиг. 1 и 2 представлены функциональная схема частотно-управляемо го электропривода, варианты. Частотно-управляемый электропривод содержит асинхронный двигатель 1 подключенный к -преобразователю 2 час тоты, формирователь 3 фазных токов, связанный выходами с управляющими входами преобразователя 2 частоты, блок 4 суммирования, вход . которого соединен с выходом измерителя 5 частоты вращения ротора и блоком 6 формирования абсолютного скольжения блок 7 задания управляющего сигнала, дифференцирующее звено 8 первого порядка и формирователь 9 производной управляющего сигнала, при этом выход блока 7 задания управляющего сиг нала соединен с входом дифференцирую щего звена 8 первого порядка, подклю ченногб своим выходом к первому входу формирователя 3 фазных токов и блоку 6 формирования абсолютного скольжения 6, выходы блока 7 задания управляющего сигнала и дифференцирующего звена 8 первого порядка подклю 1чены к входам формирователя 9 производной управляющего сигнала, выход которого соединен с третьим входом сумматора 4, В частотно-управляемый электропри вод могут быть введены релейный элемент 10, схема 11 совпадения и блок 12инвертирования фазных токов, при этом блок 6 формирования абсолютного скольжения содержит формирователь 13величины фазных токов, датчик 14 знака абсолютного скольжения и блок 15 умножения. Блок 12 инвертирования фазных токов включен между выходами формирователя 3 фазных токов и управ ляющими входами преобразователя 2 частоты, управляющий вход блока 12 инвертирования фазных токов соединен через последовательно включенные схе му 11 совпсщения .и релейный элемент 10 с выходом блока 7 задания управляющего сигнала, входы формирователя б величины абсолютного скольжения и датчика 14 знака абсолютного скольжения объединены и являются входами блока формирования абсолютного скольжения, а ни выходы соединены со входами блока 15 умножения, выход которого является выходом блока формирования абсолютного «Скольжения, выход датчика 14 знака абсолютного скольжения соединен с другим входом схемы 11 совпс1дений. Предлагаемый электропривод работает следующим образом. Сигнал UfA, с выхода блока 7 задания управляющего сигнала дифференцируется звеном 8 первого порядка. Полученный сигнал Uj, отражаквдий скорость изменения U, определяет амплитуду частотно-регулируемого трехфазного сигнала U на выходе формиррвателя 3фазных токов и, .кроме того, поступая на входы датчика 14 знака абсолютного скольжения и формирователя 13 величины абсолютного скольжения, задает знак и величину абсолютного скольжения - сигналы Ug и . Эти сигналы, перемножаясь в блоке 1 умножения, задают абсолютное скольжение - сигнал и. Кроме того, сравнением сигналов U(j и Uj в формирователе 9 производной управлякяцего сигнала выделяется производная сигнала UM Полученный сигнал U суммируется с сигналом Ug и сигналом U с выхода измерителя 5 частоты вращения ротора на сумматоре 4. Сигнал Uj с выхода сумматора, задающий частоту тока статора, преобразуется в трехфазный синусоидальный сигнал Ug с частотой, пропорциональнЪй сигналу Uj, и поступает на вход блока 12 инвертирования фазных токов. Блок 12 представляет собой инверторы, управляемые сигналом U(o с выхода схемы 11 совпадения. Этот сигнал формируется в случае несовпадения знаков сигналов U;n и Ui логическим сравнением сигналов Ug и выходов задатчика 14 знака абсолютного скольжения и релейного элемента 10. Сигнал U с выхода блока 12 управляет работой преобразователя 2 частоты. Уравне ния роторных обмоток асинхронногодвигателя, записанные в подвижной системе координат, вращающихся с синхронной частотой и сориентированной осью X по вектору потокосцепления ротора в относительных единицах имеют вид 0 Г2(-ТрН)(,, .p, + г,JLo.iyi, где (fz потокосцепление ротора; - проекция статора на ось X; LU - проекция тока статора на ось У; fb - рараи етр абсолютного скольжения; - активное приведенное сопротивление обмоток ротора; j - полная приведенная индуктивность обмоток ротора; ; LO приведенная индуктивность обмоток ротора без учета j потоков рассеяния ( - постоянная времени обмоток ротора. Исследования показали, что максимум электромагнитного момента асинхронного двигателя при заданной величине тока статора обеспечивается при равенстве проекций этого вектора на вектор потокосцепления ротора. Учитывая, что в относительных еди ницах ЭЬ у. где М. 1дв - электромагнитный момент асинхронного двигателя, можно сформулировать цель управления Для обеспечения высокодинамичного регулирования электромагнитного момента асинхронного двигателя с потерями, близкими к минимальным, необходимо величину потокосцепления ротора регулировать с минимально возможным временем протекания электромагнитных переходных процессов, обес печивая при этом равенство проекции вектора тока статора на вектор похо косцепления ротора. Исходя из поставленной задачи, .рассмотрим уравнения (1). Из первого уравнения видно, что если связать величину iy, с параметром задания момента и следующей зависимостью; Ц, то параметр ( будет связан безынерционно с параметром Uj. Необходимо также обеспечить выполнение равенства ; 1/11 Lj, i Xl - М )(3) которое практически удовлетворитель но соблюдается при (4) где К - коэффициент передачи конту ра регулирования тока, , Связь скорости изменения р и ск рости изменения вытек.ает из рассмотрения физической сущности элект ромагнитных переходных процессов в асинхронном двигателе. В процессе и менения величины тока статора пу-тем изменения активной составляющей сопротивления ротора равенство (2) нарушается ; что компенсировать соответствующим изменением реактив- ной составляющей, изменяя реактивное сопротивление роторной цепи. В предлагаемом устройстве выполнение равенства (2) обеспечивается введением сигнала с выхода дифференцирующего звена первого порядка в контур регулирования амплитуды тока статора, а выполнение равенства (4) обеспечивается введением сигнала с выхода формирователя производной управняющего сигнала в контур регулирования частоты тока статора. Предлагаемое устройство недостаточно эффективно функционирует при относительно быстром уменьшении сигнала Uji. В этом случае необходимо изменить знак составляющей ток.а статора ix , что достигается сравнением знака сигнала U задания амплитуды тока статора и знака управляющего сигнала идд, ив случае их несовпадения сигнал U;|o на выходе схемы совпадения включает схему инвертирования фазных токов, в результате чего изменяется знак фазных .токов на обратный. Таким образом, предлагаемый частотно-управляемый электропривод аозволяет сократить время протеканий электромагнитных процессов в 10-40 раз в зависимости от уровня управляющего сигнала, в.результате чего вре мя разгона электропривода сокращается, частота пропускания скоростного контура увеличивается в 1,5 раза, а диапазон регулирования скорости увеличивается в 5 раз. Опытный образец привода, работая в составе промыщленного робота типа Универсал-Б и практически не уступая по своим динамическим характеристикам электроприводам с асинхронными двигателями, регулируемыми по постоянству п.отокосцепления ротора, потребляет на 40% меньше электроэнергии.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бродовский В.Н | |||
| и др | |||
| Приводы с частотно-токовым управлением М | |||
| , Энергия, 1974, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сандлер А.С | |||
| и др | |||
| Автоматическое частотное управление асинхро ными двигателями | |||
| М., Энергия, 1974, с | |||
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
