Изобретение относится к полиграфи ческому машиностроению и может быть использовано в самонакладах к листовым печатным машинам для автоматичес- кого регулирования количества подаваемого воздуха в зависимости от скорости работы самонаклада.
Цель изобретения - Стабилизация условий разделения кромок листов при изменении скорости самонаклада.
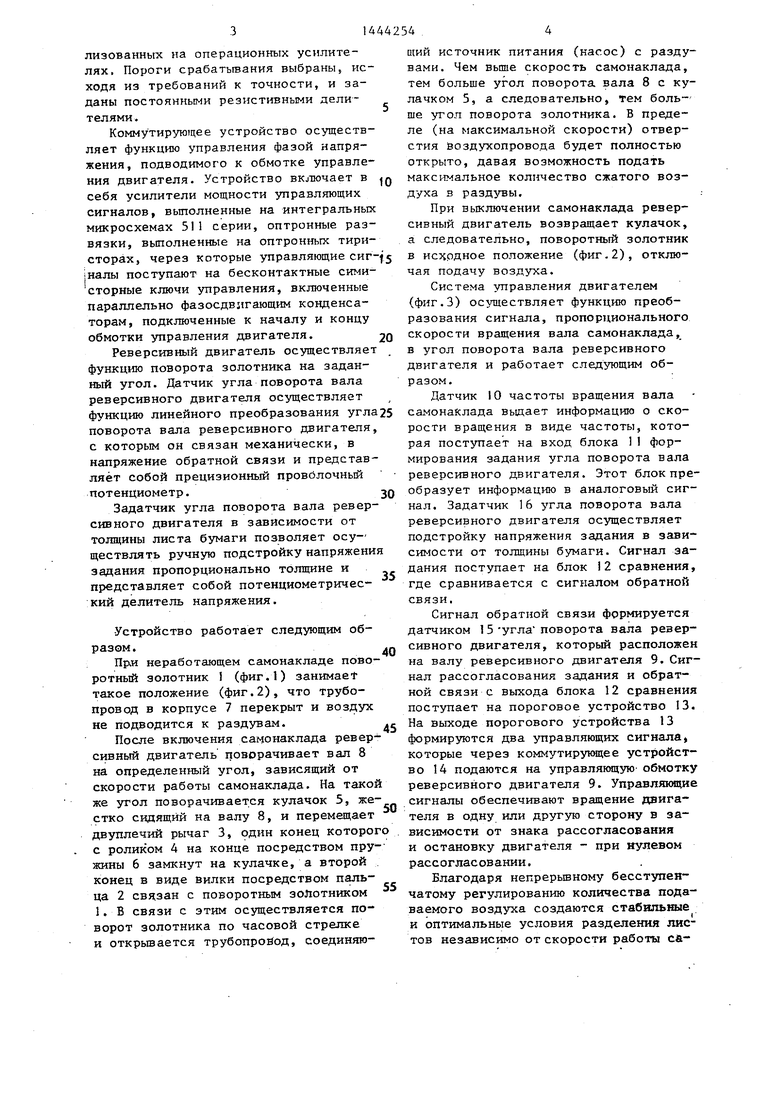
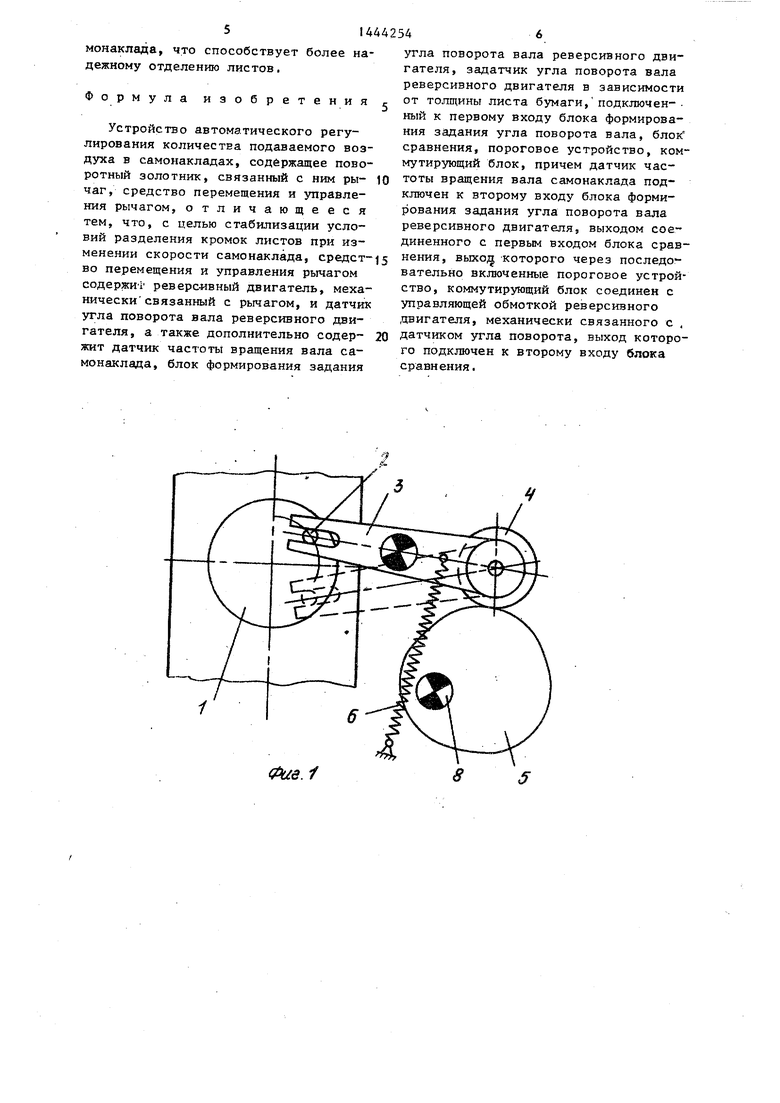
На фиг.1 представлена конструкция механизма управления поворотным золотником; ла фиг,2 - сечение трубопровода и поворотного золотника; на фиг , 3 - блок-схема системы автомати- ческого управления двигателем.
Устройство автоматического регулирования количества подаваемого воздуха в самонакладах в зависимости от скорости работы самонаклада содержит поворотный золотник 1 с установленным на нем пальцем 2, рычаг 3 с роликом 4, который контактирует с кулачком 5, 6, корпус .трубопровода 7, вал 8, который жестко связан с реверсивным двигателем 9 (не показаны) , систему автоматического управ- ления бесступенчатьм изменением угла поворота вала двигателя в функции скорости работы самонаклада, которая включает датчик 10.частоты вращения вала самонаклада, блок i1 формирования задания угла поворота вала реверсивного двигателя, блок 12 сравне- ния, пороговое устройство 13, комму- тирующее устройство 14, датчик 5 угла поворота вала реверсивного двигателя и блок 16-задатчик угла поворота -вала реверсивного двигателя в зависимости от толщины листа бумаги.
Датчик. 0 частоты вращения представляет собой индуктивный датчик, формирующий импульсную последовательность, . частота которой пропорциональна скорости вращения вала самонаклад при взаимодействии с колесом, расположенным на этом валу.
Блок формирования задания угла поворота вала реверсивного двигателя вьлолняет функцию линейного преобразования частоты следования импульсов датчика частоты вращения в напряжение задания.
Принцип действия преобразователя основан на выделении постоянной составляющей путем периодического интегрирования укороченных калиброванных
5
0 . 0 ,, 0
5
0
5
по амплитуде и длительности импульсов, частота следования которых равна частоте следования импульсной последовательности датчика частоты вра- щения.
Таким образом, функционально преобразователь состоит из формирователя импульсов и фильтра низкой частоты. Формирователь калиброванных импульсов преобразует входную импульсную последовательность сигналов с датчика частоты вращения в импульсную последовательность с частотой, равной частоте входной импульсной последовательности, но укороченный наперед заданной длительности. При этом вьтолняется условие, по которому минимальная длительность входных импульсов всегда больше длительности формируемых импульсов.
Функционально формирователь включает входной и выходной триггеры, управляющие работой счетчика, счетчик с наперед заданным коэффициентом делания, высокочастотный кварцевый ге- гератор. При зтом разрешение начала счета фиксируется входным триггером по сигналу от датчика частоты вращения, а окончание работы счетчика фиксируется выходным триггером. Фильтр низкой частоты преобразует калиброванные по амплитуде и длительности импульсы, поступающие с выхода формирователя, в напряжение, изменяющееся в требуемом диапазоне. Фильтрреализован на интегрирующем операционном усилителе.
Блок сравнения осуществляет сравнение напряжения задания и обратной связи по положению вала двигателя и эьщает на выходе напряжение, пропорциональное угловому рассогласованию. Блок представляет собой дифференциальный усилитель, реализованный на интегральной схеме.
Пороговое устройство реализует фушсцию грехпозиционного управления, вырабатьшает сигналы управления в комбинациях вида 0,1 или 1,0 для вращения двигателя в ту или иную сторону в зависимости о т знака рассогласования, либо форсированную остановку 0,0, если рассогласование не превышает положительного и отрицательного порогов зоны нечувствительности, которые задаются уровнями срабатьшания двух однопороговьк компараторов, peaлизованных на операционных усилителях. Пороги срабатывания выбраны, исходя из требований к точности, и заданы постоянными резисп-гаными делителями.
Коммутирующее устройство осуществляет функцию управления фазой напряжения, подводимого к обмотке управления двигателя. Устройство BKjTK)4aeT в себя усилители мощности управляющих сигналов, вьшолненные на интегральных микросхемах серии, оптронные развязки, выполненные на оптронных тиристорах, через которые управляющие сиг {налы поступают на бесконтактные сими- сторные ключи управления, включенные параллельно фазосдвлгающим конденсаторам, подключенные к началу и концу обмотки управления двигателя.
Реверсивный двигатель осуществляет функцию поворота золотника на заданный угол. Датчик угла поворота вала реверсивного двигателя осуществляет функцию линейного преобразования угла поворота вала реверсивного двигателя, с которым он связан механически, в напряжение обратной связи и представляет собой прецизионный провблочный потенциометр.
Задатчик угла поворота вала реверсивного двигателя в зависимости от толщины листа бумаги позволяет осу- ществлять ручную подстройку напряжени задания пропорционально толщине и представляет собой потенциометричес- :кий делитель напряжения.
Устройство работает следующим образом.
При неработающем самонакладе поворотный золотник 1 (фиг.1) 3aHHMaet такое положение (фиг.2), что трубопровод в корпусе 7 перекрыт и воздух не подводится к раздувам..,
После включения самонаклада реверсивный двигатель поворачивает вал 8 на определенный угол, зависящий от скорости работы самонаклада. На такой же угол поворачивается кулачок 5, жестко сидящий на валу 8, и перемещает двуплечий рычаг 3, один конец которого с роликом 4 на конце посредством пру-- жины 6 замкнут на кулачке, а второй . конец в виде вилки посредством пальца 2 связан с поворотным золотником 1. В связи с этим осуществляется поворот золотника по часовой стрелке и открьшается трубопровод, соединяю50
55
Q 5 0
5 0
5
Q
.,
0
5
щий источник питания (насос) с раздувами. Чем выше скорость самонаклада, тем больше угол поворота вала В с кулачком 5, а следовательно, тем боль- ще угол поворота золотника. В пределе (на максимальной скорости) отверстия воздухопровода будет полностью открыто, давая возможность подать максимальное количество сжатого воздуха в раздувы.
При выключении самонаклада реверсивный двигатель возвращает кулачок, а следовательно, поворотный золотник в исходное положение (фиг.2), отключая подачу воздуха.
Система управления двигателем (фиг.З) осуществляет функцию преобразования сигнала, пропорционального скорости вращения вала самонаклада, в угол поворота вала реверсивного двигателя и работает следующим образом. Датчик 10 частоты вращения вала самонаклада выдает информацию о скорости вращения в виде частоты, которая поступает на вход блока 11 формирования задания угла поворота вала реверсивного двигателя. Этот блок преобразует информацию в аналоговый сигнал. Задатчик 16 угла поворота вала реверсивного двигателя осуществляет подстройку напряжения задания в зависимости от толщины бумаги. Сигнал задания поступает на блок 12 сравнения, где сравнивается с сигналом обратной связи.
Сигнал обратной связи формируется датчиком 15 угла поворота вала реверсивного двигателя, который расположен на валу реверсивного двигателя 9. Сигнал рассогласования задания и обратной связи с Выхода блока 12 сравнения поступает на пороговое устройство 13. На выходе порогового устройства 13 формируются два управляющих сигнала которые через коммутирунщее устройство 14 подаются на управляющую- обмотку реверсивного двигателя 9. Управляющие сигналы обеспечивают вращение двигателя в одну или другую сторону в зависимости от знака рассогласования и остановку двигателя - при нулевом рассогласовании.
Благодаря непрерьюному бесступенчатому регулированию количества подаваемого воздуха создаются стабильные и оптимальные условия разделения листов независимо от скорости работы са51444254
онаклада, что способствует более наежному отделению листов.
г о ны ни ср му то кл д н в с д с
Формула изобретения
Устройство автоматического регулирования количества подаваемого воздуха в самонакладах, содержащее поворотный золотник, связанный с ним ры- чаг, средство перемещения и управления рычагом, отличающееся тем, что, с целью стабилизации условий разделения кромок листов при изменении скорости самонаклада, средство перемещения и управления рычагом содержи реверсивный двигатель, механически связанный с рычагом, и датчик угла поворота вала реверсивного двигателя, а также дополнительно содер- жит датчик частоты вращения вала самонаклада, блок формирования задания
угла поворота вала реверсивного двигателя, задатчик угла поворота вала реверсивного двигателя в зависимости от толщины листа бумаги, подключен- ный к первому входу блока формирования задания угла поворота вала, блок сравнения, пороговое устройство, коммутирующий блок, причем датчик частоты вращения вала самонаклада подключен к второму входу блока формирования задания угла поворота вала реверсивного двигателя, выходом соединенного с первым входом блока сравнения, выхо -которого через последовательно включенные пороговое устройство, коммутирующий блок соединен с управляющей обмоткой реверсивного двигателя, механически связанного с . датчиком угла поворота, выход которого подключен к второму входу блока сравнения.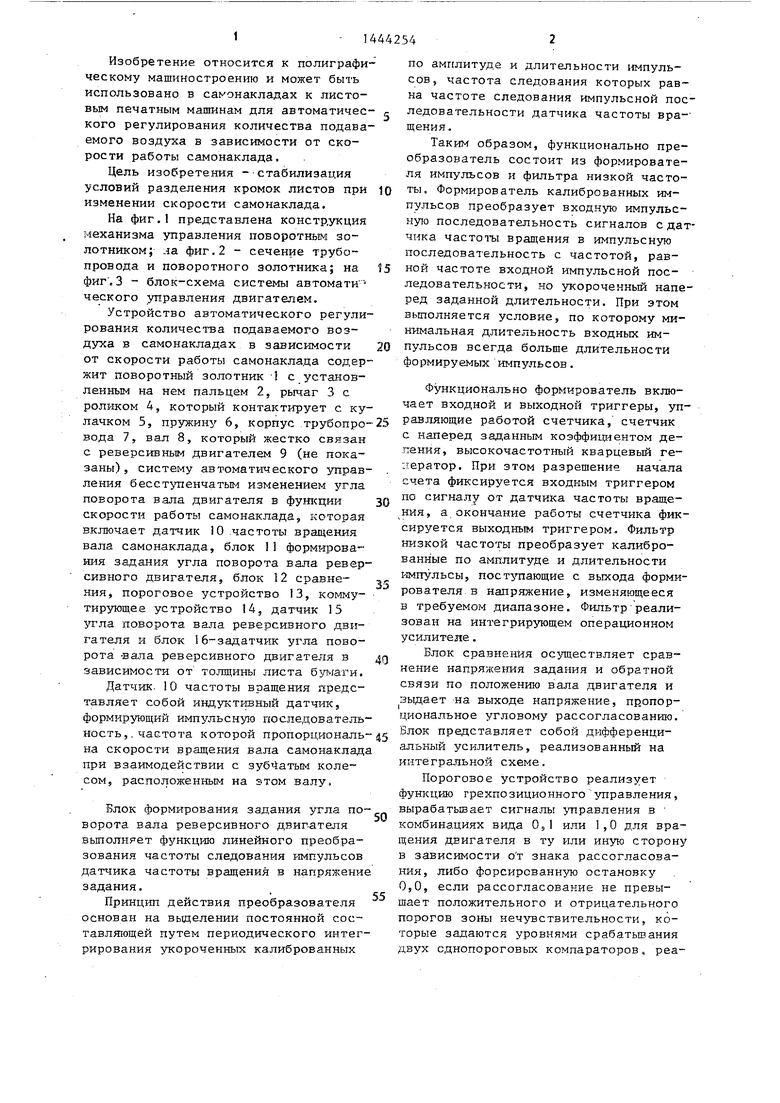
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU813487A1 |
| Устройство управления летучими ножницами, работающими в режиме непрерывного вращения | 1988 |
|
SU1519855A2 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Устройство для управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1685635A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
Фиа. 1
Фи.2
Фи.д
