(Л
fff
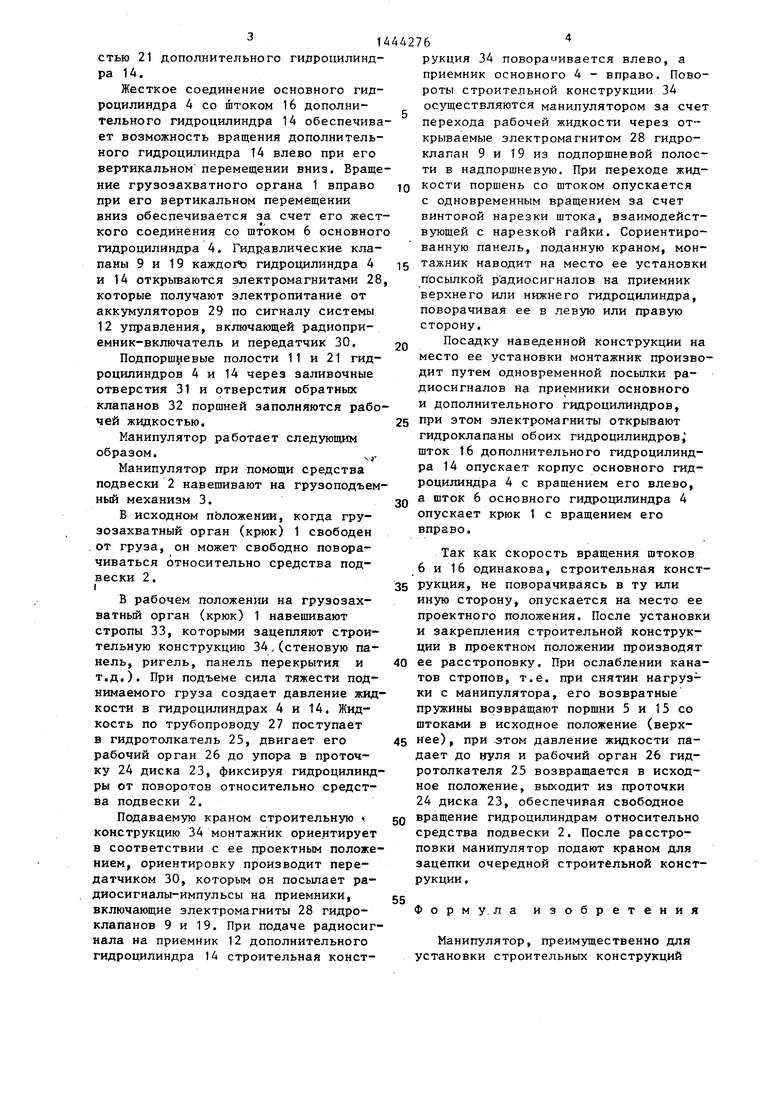
ложение содержит грузозахватный орган 1I средство подвески 2 к грузоподъемному мexaниз fy 3, механизм поворота грузозахватного органа 1, включающий два последовательно соединенных гидроцилиндра 4 и 14, штоки 6 и 16 которых выполнены с винтовыми нарезками в противоположных направлениях. Каждый из гидроцилиндров имеет над- поршневые 10 и 20 И подпоршневые 11 и 21 полости, соединенные перепускными каналами 8 и 18 с гидравлическими клгпанами 9 и 19, систему 12 управления направлением вращения грузозахватного органа 1 и средство его фиксации, установленное в надпоршневой полости 20 дополнительного гидроцилиндра 14. Средство фиксации включает в себя установленный на валу 22 диск 23 с проточками 24 в торцовой поверхности, гидротолкатель 25, установленный с возможностью взаимодействия своим рабочим органом 26 с проточкой 24. Манипулятор позволяет производить управляемый реверс грузозахватного органа 1 в нагруженном состоянии и свободный поворот в исходном состоянии. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1981 |
|
SU977356A1 |
| Грузовая подвеска | 1990 |
|
SU1794851A2 |
| Грузозахватная траверса | 1983 |
|
SU1152919A2 |
| Грузовая подвеска | 1989 |
|
SU1684231A1 |
| Шаблон для изготовления футеровки | 1982 |
|
SU1085670A1 |
| Грузозахватное устройство | 1991 |
|
SU1787922A1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Грузозахватное устройство с автоматическим кантователем для монтажа панелей перекрытий | 1976 |
|
SU614002A2 |
| ГАЗОДИНАМИЧЕСКИЙ РЫХЛИТЕЛЬ | 2003 |
|
RU2236514C1 |
| Способ монтажа многоэтажного здания и монтажный кондуктор-манипулятор для его осуществления | 1982 |
|
SU1096365A1 |
Изобретение относится х грузоподъемным устройствам и может быть использовано для установки строительных конструкций в проектное положение при возведении зданий и сооружений, Целью изобретения является повьшение надежности и удобства в эксплуатации. Манипулятор для установки строительных конструкций в проектное по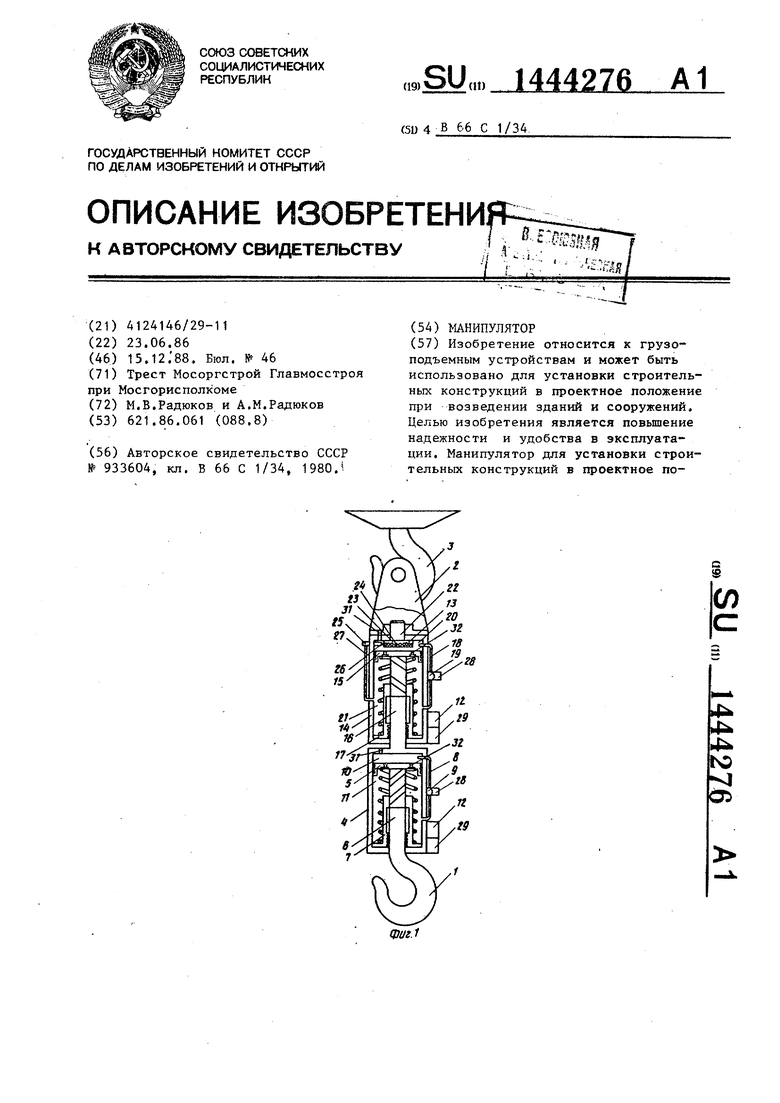
1
Изобретение относится к грузоподъемным устройствам и может быть использовано для установки строительных конструкций в проектное положе- ние при возведении зданий и сооружеНИИ,
Цель изобретения - повышение надежности и удобства в эксплуатации,
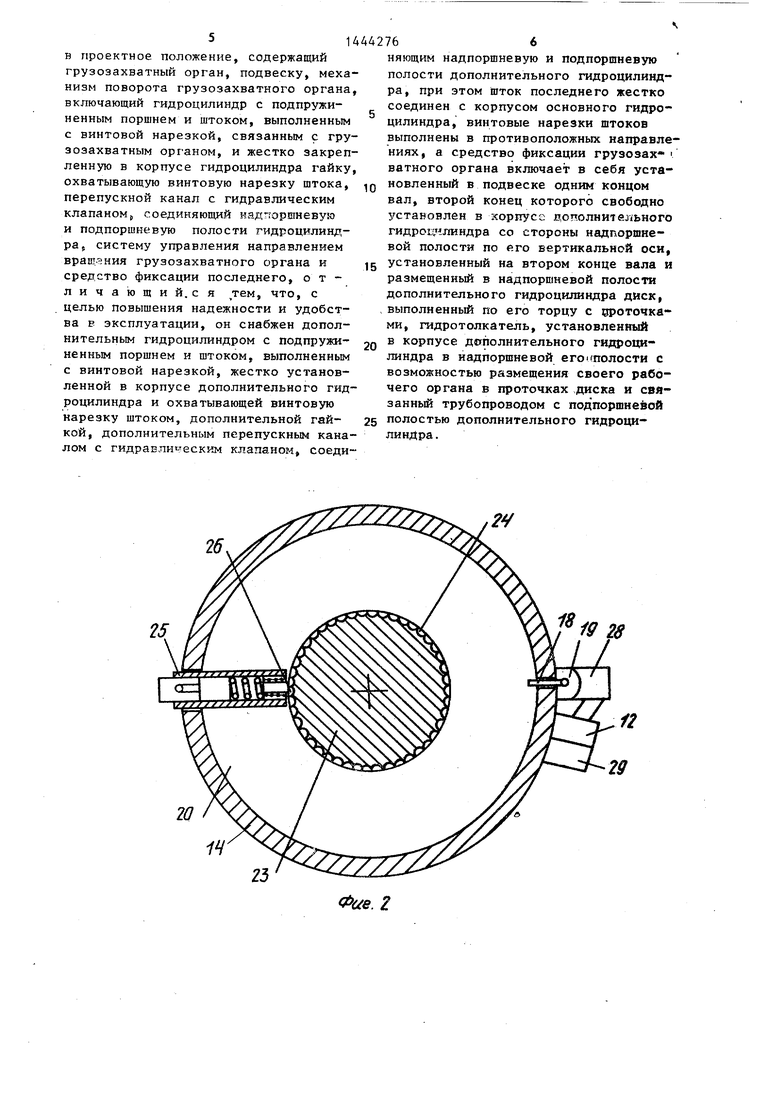
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - средство фиксации грузозахватного органа, вид сверху; на фиг.З - ориентирование и наводка на место установки стеновой панели,
Манипулятор для установки строительных конструкций в проектное положение содержит грузозахватный орган 1, средство подвески 2 к грузоподъем- ному механизму 3, механизм поворота грузозахватного органа 1, включающий цилиндр 4 с подпружиненным поршнем 5 и штоком 6, выполненным с винтовой нарезкой и связанным с грузозахватным органом 1, В корпусе гидроцилиндра 4 жестко закреплена гайка 7, охватывающая винтовую нарезку штока 6, Механизм поворота содержит также перепускной канал .8 с гидравлическим : клапаном 9, соединяющим надпоршневую 10, подпоршневую 11 полости гидроцилиндра 4, Манипулятор включает сиёте- му 12 управления направлением вращй ния грузозахватного органа 1 и сред- ство 13 его фиксации,.
Манипулятор снабжен дополнитель- ньм гидроцилиндром 14 с подпружиненным поршнем 15 и штоком 16, выполненным с винтовой нарезкой, в корпусе дополнительного гидроцилиндра 14 жестко установлена дополнительная гайка 17, охватывающая винтовую нарезку дополнительного штока 16, дополнительным перепускным каналом 18 с гидравлическим клапаном 19, соединяющим надпоршневую 20 и подпоршневую 21 полости дополнительного гидроцилиндра 14.
Винтовые нарезкя штоков 6 и 16 выполнены в противоположных направлениях.
Средство 13 фиксации грузозахватного органа 1 включает в себя установленный в средстве подвески 2 к грузоподъемному механизму 3 одним концом вал 22, второй конец которого свободно установлен в корпусе дополнительного гидроцилиндра 14 со стороны надпорщневой полости 20 по его вертикальной оси. На втором конце вала 22 в надпоршневой полости 20 дополнительного гидроцилиндра 14 установлен диск 23 с выполненньми по его торцу проточками 24, В корпусе дополнительного гидроцилиндра 14 а надпоршневой его полости 20 установлен гидротолкатель 25 с возможностью размещения своего рабочего органа 26 в проточках 24 диска 23 и связан трубопроводом 27 с подпоршневой поло
стью 21 дополнительного гидроцилиндра 1 А .
Жесткое соединение основного гидроцилиндра 4 со штоком 16 дополнительного гидроцилиндра 14 обеспечивает возможность вращения дополнительного гидроцилиндра 14 влево при его вертикальном перемещении вниз. Вращение грузозахватного органа 1 вправо при его вертикальном перемещении вниз обеспечивается за счет его жесткого соединения со штоком 6 основног гидроцилиндра 4. Гидравлические клапаны 9 и 19 каждогчэ гидроцилиндра 4 и 14 открьгеаются электромагнитами 28 которые получают электропитание от аккумуляторов 29 по сигналу системы 12 управления, включающей радиоприемник-включатель и передатчик 30.
Подпоршревые полости 11 и 21 гидроцилиндров 4 и 14 через заливочные отверстия 31 и отверстия обратных клапанов 32 поршней заполняются рабочей жидкостью.
Манипулятор работает следующим образом.,,
Манипулятор при помощи средства подвески 2 навешивают на грузоподъемный механизм 3.
В исходном пЬложении, когда грузозахватный орган (крюк) 1 свободен .от груза, он может свободно поворачиваться относительно средства подвески 2. I
В рабочем положении на грузозахватный орган (крюк) 1 навешивают стропы 33, которыми зацепляют строи- тельную конструкцию 34,(стеновую панель, ригель, панель перекрытия и т.д.). При подъеме сила тяжести поднимаемого груза создает давление жидкости в гидроцилиндрах 4 и 14. Жидкость по трубопроводу 27 поступает в гидротолкатель 25, двигает его рабочий орган 26 до упора в проточку 24 диска 23, фиксируя гидроцилиндры от поворотов относительно средства подвески 2.
Подаваемую краном строительную конструкцию 34 монтажник ориентирует в соответствии с ее проектным положением, ориентировку производит передатчиком 30, которым он посылает радиосигналы-импульсы на приемники, включающие электромагниты 28 гидроклапанов 9 и 19. При подаче радиосигнала на приемник 12 дополнительного гидроцилиндра 14 строительная конст
0
д 5
5
0
5
рукция 34 поворачивается влево, а приемник основного 4 - вправо. Повороты строительной конструкции 34 осуществляются манипулятором за счет перехода рабочей жидкости через открываемые электромагнитом 28 гидроклапан 9 и 19 из подпоршневой полости в надпоршневую. При переходе жидкости поршень со штоком опускается с одновременным вращением за счет винтовой нарезки штока, взаимодействующей с нарезкой гайки. Сориентированную панель, поданную краном, монтажник наводит на место ее установки посылкой радиосигналов на приемник верхнего или нижнего гидроцилиндра, поворачивая ее в левую или правую сторону.
Посадку наведенной конструкции на место ее установки монтажник производит путем одновременной посылки радиосигналов На приемники основного и дополнительного гидроцилиндров, при этом электромагниты открывают гидроклапаны обоих гидроцилиндровj шток 16 дополнительного гидроцилиндра 14 опускает корпус основного гидроцилиндра 4 с вращением его влево, а шток 6 основного гидроцилиндра 4 опускает крюк 1 с вращением его вправо.
Так как скорость вращения штоков 6 и 16 одинакова, строительная конст- 5 РУкция, не поворачиваясь в ту или иную сторону, опускается на место ее проектного положения. После установки и закрепления строительной конструкции в проектном положении производят ее расстроповку. При ослаблении канатов стропов, т.е. при снятии нагрузки с манипулятора, его возвратные пружины возвращают поршни 5 и 15 со штоками в исходное положение (верхнее) , при .этом давление жидкости падает до цуля и рабочий орган 26 гидротолкателя 25 возвращается в исходное положение, выходит из проточки 24 диска 23, обеспечивая свободное вращение гидроцилиндрам относительно средства подвески 2. После расстро- повкй манипулятор подают краном для зацепки очередной строительной конструкции .
Формула изобретения
Манипулятор, преимущественно для установки строительных конструкций
0
5
0
в проектное положение, содержащий грузозахватный орган, подвеску, механизм поворота грузозахватного органа, включающий гидроцилиндр с подпружиненным поршнем и штоком, выполненным с винтовой нарезкой, связанным с грузозахватным органом, и жестко закрепленную в корпусе гидроцилиндра гайку, охватывающую винтовую нарезку штока, перепускной канал с гидравлическим клапаномJ, соединяющий надпоршневую и подпоршневую полости гидроцилиндра , систему управления направлением вращения грузозахватного органа и средство фиксации последнего, о т - личающий, ся ,тем, что, с целью повышения надежности и удобства в эксплуатации, он снабжен дополнительным гидроцилиндром с подпружиненным поршнем и штоком, выполненным с винтовой нарезкой, жестко установленной в корпусе дополнительного гидроцилиндра и охватывающей винтовую нарезку штоком, дополнительной гайкой, дополнительным перепускным каналом с гидравлическим клапаном, ссади10
14442766
няющим надпоршневую и подпоршневую полости дополнительного гидроцилинд ра, при этом шток последнего жестко соединен с корпусом основного гидроцилиндра, винтовые нарезки штоков выполнены в противоположных направлениях, а средство фиксации грузозах ватного органа включает в себя установленный в подвеске одним концом вал, второй конец которого свободно установлен в корпусе дополнительного гидроц.члиндра со стороны надпоршне- вой полости по его вертикальной оси, установленный на втором конце вала и размещенный в надпоршневой полости дополнительного гидроцилиндра диск, выполненный по его торцу с И)оточка- ми, гидротолкатель, установленный в корпусе дополнительного гидроцилиндра в надпоршневой егокполости с возможностью размещения своего рабочего органа в проточках диска и связанный трубопроводом с подпоршневой полостью дополнительного гидроци- линдра.
15
20
25
26
20
1Н
.1
2
9 28
I
| Крюковая подвеска с поворотом крюка | 1980 |
|
SU933604A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
