4
4ib 4 00 Ю
блоки памяти 4-6, первую 7 и вторую 8 группы элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2, первую 9 и вторую 10 группы элементов И, с первого по третий элементы ИЛИ 11 - 13, генератор 14 тактовых импульсов. Код ситуации с дискретных датчиков объекта контроля заносится в регистр 1, в регистр 3 записывается код команды управления, Пр -двоичным векторам, выбираемым из блоков 5 и 6 памяти, определяется ситуация, когда на объект контроля
подана недопустимая команда управления, одновременно код ситуации предшествующего шага в регистре 2 поступает на второй блок памяти 4, из которого выбирается переходной инвариант и определяется ситуация недопус- тимой реакции объекта контроля, В случае нарушений в работе объекта контроля значения в регистрах 1-3 блокируются, а на выходах соответствующих признаков устройства появляются сигналы ошибки, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля ситуационной динамики сложных технических объектов | 1987 |
|
SU1481799A1 |
| Устройство для контроля динамики сложных систем | 1986 |
|
SU1324038A1 |
| Устройство для ситуационного управления и контроля | 1987 |
|
SU1495818A1 |
| Устройство для ситуационного контроля и управления | 1986 |
|
SU1368895A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ | 1992 |
|
RU2041494C1 |
| Устройство для контроля и диагностики неисправностей | 1986 |
|
SU1399706A1 |
| Устройство для контроля логических блоков | 1987 |
|
SU1448346A1 |
| Устройство для контроля состояний сложных динамических систем | 1989 |
|
SU1725231A1 |
| Устройство для комбинационно-логического управления сложными системами | 1987 |
|
SU1539775A1 |
| Запоминающее устройство с автономным контролем | 1987 |
|
SU1474746A2 |
Изобретение относится к области вычислительной техники, а более конкретно к средствам автоматического контроля сложных технических систем Цель изобретения - повышение досто ; верности контроля за счет выявления недопустимых управляющих воздействий. Устройство содержит с первого по третий, регистры 1-3,.с первого по третий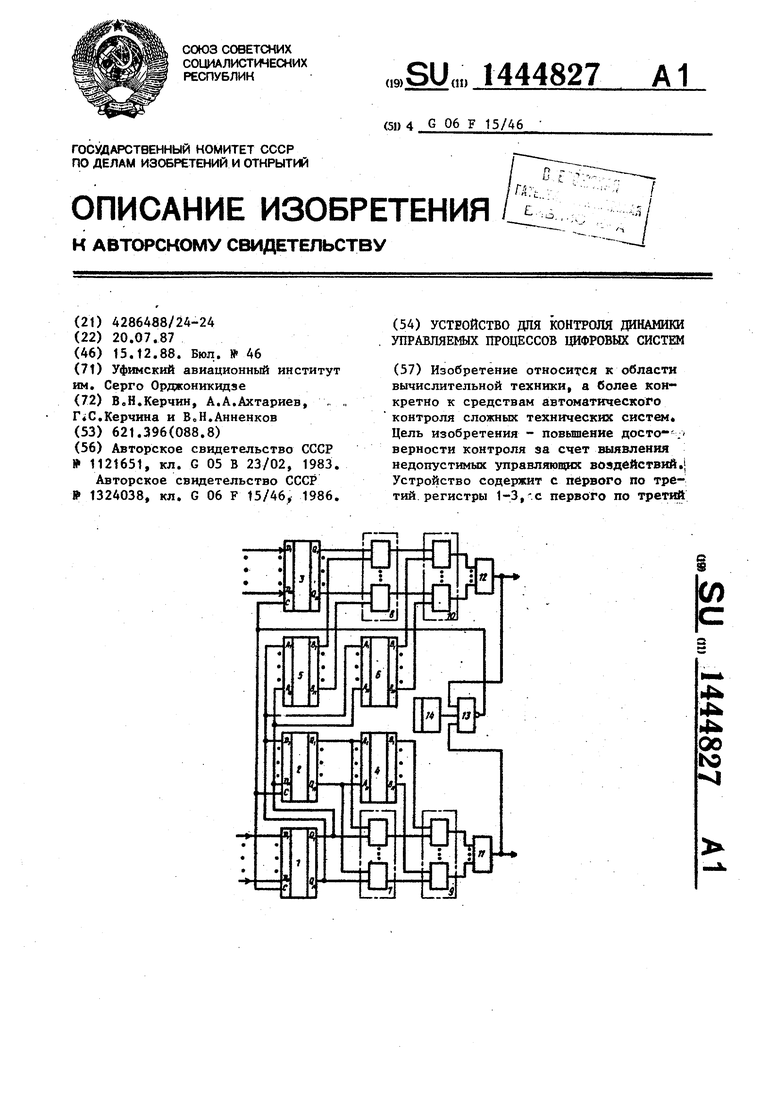
1
Изобретение относится к вычислительной технике, а именно к средствам автоматического контроля сложных технических систем.
Целью изобретения является новы- шение достоверности контроля за счет выявления недопустимых управляюпрос воздействий.
Характерной особенностью сложных технических систем как объектов контроля является то, что состояние системы имеющимся набором двоичных признаков Р {Р; j xaj- рактеризуется лишь с точностью до некоторых подмножеств S: множества возможных состояний. Такие подмножества принято называть ситуациями, а соответствующие им вектора значений двоичных признаков Р(8(Р;| ,,., ,Р,,) кодами.ситуаций. В отличие от состоя НИИ, управляющие воздействия в таких системах, как правило, контролируютс псгуиностью и однозначно определяются кодом команды управления D(U;) (d ,..с,d)о Неопределенность истинного состояния системы в ситуации Sj и асинхронный характер протекающих в ней процессоб ведет к тому, что и реакцию системы на утт равляющее воздействие U; можно определить лишь с точностью до некоторого подмножест в а, множества возможных состояний системы. Поэтому для таких систем определить, какая ситуация возникнет на следующем этапе, если.в текущей ситуации S:; реализовано управляющее
воздействие , можно лишь с точностью до некоторого подмножества R(S, Uj) множества возможных ситуаций S |S;j . Если U(S ) - Множество управляющих воздействий Uj, допустимых в ситуации S , то множество R(Sj) UjR(S;, Uj), I j U5€U(Sj)} опредег ляет множество допустимых переходов ( )), Для каждой ситуации S; множества U(S}1) и R(S(,Uj) могут быть определены априорно, на основании изучения технологии управления и ситуационной динамики управляемой системы. Пусть R4sj)R(S})USj, переходным инвариантом контролируемой системы в ситуации Sj называется п- разрядный вектор Q(S{), определяемый в соответствии с выражением
Q(S;) (&P(S:))vaP(S,)), J i{Sj€ eR (S)3, (1)
где P(S;) - код ситуации Sj j
P(S; J - его инверсия. Очевидно, что вектор Q(S ) содержит единицы во всех тех разрядах, которые совпадают для всех векторов P(S) из R CSj). Необходимое условие кор-- ректности ситуационной динамики (условие соответствия реализовавшихся переходов допустимых) в этом случае может быть описано выражением
P(S(t-t))&Q(S(t-1))P(S(t))SQ(S(t- -О)(2)
или, что эквивалентно, но проще реа- лизуем о технически,
(P(S(t-1))®P(SCt-1))&Q(S(t-l))0.
(3)
Данное условие может быть сформулировано следующим образом: переход является недопусти11ья- 5 если при допустимом управляющем воздействии U:eU(S,) из ситуации S(t-1) контролируемая система перешла в такую ситуацию S(t)S, что изменился хотя бы один из разрядов, определяемых переходным инвариантом Q(S ). В этом случае фиксируется нарзтиение нормаль но го функционирования контролируемой системы (критическая ситуация). Очевидно, что если (S,0 то нарушение, условия (3) не может служить свидетельством того, что система функционирует непредсказуемым образом, поскольку недопустимьй переход может быть вызван недопустимым управляющим воздействием. Необходимое условие до- пустимости управляющего воздействия U(t) может быть описано выражением
(G(S(t))@D(U(t)))a(G(S(t))Y . VH(S(t)))0,(4)
m - разрядные двоичные вектора G(S) и H(S,) вычисляются для каждой
ситуации ниями
S: в соответствии с выраже
G(S; )4D(U:); H(Si)4D(U:);
(UjeU(Si)
(5)
и сформулировано следующим образом - управляющее воздействие считается недопустимым, если код команды управления D(U(t)) содержит единицу (нуль) в том разряде кода, в котором все (S(t)) содержат нули (единицы) В случае нарушения этого условия фиксируется ошибка управления и блокиру
30 МОДУЛЮ 2 первой группы и входы второго 5 и третьего- 6 блоков памяти, в которых по соответствующему адресу находятся двоичные векторы S(S(t)) и F(S(t)). Одновременно в третий ре35 гистр 2 записывается поступающий на вторую группу входов устройства код реализуемой в текущий момент команды управления D(U(t)). Во второй группе
8 элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2 и ется дальнейший контроль допустимости 40 элементов И 10 этот код поразрядно перехода в соответствии с выражени- суммируется по модулю 2 с двоичным ем (3),вектором G(S(t)) и логически умножаОчевидно, что рагзделение критичес- ется на вектор F(S(t)), которые выби- ких ситуаций на два принципиально раются из второго 5 и третьего 6 бло- различных класса - вызванных ошибками 45 ков памяти соответственно. Если при
управления и вызванных ошибками не- полнения, позволяет более эффективно осуществлять контроль ситуационной динамики, а следовательно, и обеспечить более высокую функциональную достоверность контроля.
Схема устройства представлена на
чертеже о
этом хотя бы на одном выходе элементов второй группы 10 сигнал имеет единичный уровень, т.е. нарушается необходимое условие допустимости управляю- 50 щего воздействия (4, то на выходе признака ошибки управления устройства третьим элементом ИЛИ 12 формируется сигнал единичного уровня, свидетельствующий о возникновении ошибки упУстройство содержит первый 1, вто- gg равления. Этот сигнал, поступая на рой 2 и третий 3 регистры, первый 4, вход элемента ИЛИ 13, блокирует дальнейшее поступление тактовых импульсов на синхровходы регистров, блокируя тем самым контроль допустимости перевторой 5 и третий 6 блоки памяти, первую 7 и вторую 8 группы элементов СЛОЖ ЕНИЕ ПО МОДУЛЮ 2, первую 9 и вто0
0
рую 10 группы элементов И, первый 11, третий 12 и второй 13 элементы ИЛИ, генератор 14 тактовых импульсов.
Дпя настройки устройства на информационную среду конкретного объекта контроля необходимо для каждой ситуации Sj , встречающейся в технологическом цикле объекта контроля, определить множество допустимых управляющих воздействий U(S; ) и множество допустимых переходов R(S;). Затем в соответствии с выражениями (1), (5) вычисляются Q(S;), G(S;), H(S;) и по адресу, 5 определяемому кодом ситуации P(S,-), в первый 4, второй 5 и третий 6 блоки памяти соответственно заносятся двоичные векторы Q(S;), G(S;), F(S,-)
G(S;)VH(S.).
Устройство работает следующим образом.
Текущий вектор двоичных признаков P(S(t)) (код ситуации), поступающий с дискретных датчиков объекта конт5 роля на первую группу входов устройства, очередным тактовым импульсом заносится в первый регистр 1 и поступает на входы второго регистра 2, первые входы элементов СЛОЖЕНИЕ ПО
0 МОДУЛЮ 2 первой группы и входы второго 5 и третьего- 6 блоков памяти, в которых по соответствующему адресу находятся двоичные векторы S(S(t)) и F(S(t)). Одновременно в третий ре5 гистр 2 записывается поступающий на вторую группу входов устройства код реализуемой в текущий момент команды управления D(U(t)). Во второй группе
этом хотя бы на одном выходе элементов второй группы 10 сигнал имеет единичный уровень, т.е. нарушается необходимое условие допустимости управляю- 50 щего воздействия (4, то на выходе признака ошибки управления устройства третьим элементом ИЛИ 12 формируется сигнал единичного уровня, свидетельствующий о возникновении ошибки упgg равления. Этот сигнал, поступая на вход элемента ИЛИ 13, блокирует дальнейшее поступление тактовых импульсов на синхровходы регистров, блокируя тем самым контроль допустимости перехода из данной ситуации. Если же условие (4) выполняется, то очередным тактовым импульсом в первый 1 и третий 3 регистры вновь заносятся код текущей ситуации P(S(t)) и код реализуемой команды управления D(U(t)), инициируя очередной шаг контроля. Код ситуации P(S(t-1)), записанной на предшествующем шаге, переносится при
этом во второй регистр 2 и поступает на вторую группу входов первого блока 7 элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2 и на адресные входы первого блока памяти 4, где по соответствующему адре- су выбирается переходный инвариант Q(S(t-1)) ситуации S(t-1). В первой группе 7 элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2 и первой группе 9 элементов И код текущей ситуации P(S(t)) пораз- рядно суммируется по модулю 2 с кодом предшествующей ситуации P(S(t-1)) и логически умножается на переходный инвариант Q(S(t-1)), поступающий из первого, блока памяти 4, т.е. вычисляется правая часть условия (3). Если хотя бы на одном выходе элементов И первой группы 9 сигнал имеет единичный уровень (если нарушается необходимое усг ловие корректности ситуационной дина- МИКИ (3)), то первьм элементом ИЛИ 11 формируется сигнал единичного уровня на выходе признака критической ситуации устройства, также блокируя прохождение тактовых импульсов на син- хровходы регистров (анализ содержимого регистров может помочь в опреде- ,лении характера и причины возникновения критической Ситуации), Появление сигнал на выходе признака критической ситуации устройства свидетельствует о критической ситуации, связанной с неадекватной реакцией объекта контроля на формируемые управляющие воздействия.
Формула изо б,р в т е н и я
Устройство для контроля динамики управляемых процессов цифровых сие- : тем, содержащее первый и второй регистры, первый блок памяти, первую группу элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2, первую группу элементов И, первый и второй элементы ИЛИ и генератор тактовых импульсов, выход которого соединен с первым входом второго элемента ИЛИ, второй вход и выход кото50 25 30
рого подключены соответственно к выходу признака критической ситуации устройства и синхровходам первого и второго регистров, информационные входы и выходы первого регистра соединены соответственно с первой группой информационных входов устройства для подключения контролируемой системы
0 и с информационными входами второго регистра, которые подключены к первым входам элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2 первой группы, вторые входы которых соединены с выходами второго регистра и с адресными входами первого блока памяти, выходы элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2 первой группы подключены к первым входам элементов И первой группы, вторые входы которых соединены с выходами первого блока памяти, входы и вьтход первого элемента ИЛИ соединены соответственно с выходами элементов И первой группы и выходом признака критической ситуации устройства, отличающееся тем, что, с целью повышения достоверности контроля за счет выявления недопустимых управляющих воздействий, устройство содержит третий регистр, второй и третий блоки памяти, вторые группы элементов И и элементов СЛОЖЕШЕ ПО МОДУЛЮ 2,-.третий элемент ИЛИ, информационные входы третьего регистра соединены с второй группой входов
35 ройства, выходы третьего регистра подключены к первым входам элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2 второй группы, адресные входа вто рого и третьего блоков памяти соединены с выходами
40 первого регистра, выходы второго блока памяти соединены с вторыми входами элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2 второй группы, выходы третьего блока памяти соединены с первыми входами
45 элементов И второй грушш, вторые входы которых подктвочены к выходам элементов СЛОЖЕНИЕ ПО МОДУЛЮ 2 второй группы, выходы элементов И второй группы соединены с входами третьего
0 элемента ИЛИ, выход которого подключен к выходу признака ошибки упрай- ления устройства, выход второго элемента ИЛИ соединен с синхровходом третьего регистра, третий вход второ55 го элемента ИЛИ подключен к выходу признака ошибки управления устройства.
| Устройство для диагностирования взаимосвязанных электронных блоков | 1982 |
|
SU1121651A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для контроля динамики сложных систем | 1986 |
|
SU1324038A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
