ot(S;)-(&P($j))(S))f 1 j/S; eR(Sj)} , (5(S.|) (6P(Sj))(Si))I I-fj/SjCRCSj)} ,
где P(S;) - код ситуации, a P(S- ) - его инверсия. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля динамики управляемых процессов цифровых систем | 1987 |
|
SU1444827A1 |
| Устройство для контроля динамики сложных систем | 1986 |
|
SU1324038A1 |
| Устройство для ситуационного управления и контроля | 1987 |
|
SU1495818A1 |
| Устройство для ситуационного контроля и управления | 1986 |
|
SU1368895A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ | 1992 |
|
RU2041494C1 |
| Устройство для комбинационно-логического управления сложными системами | 1987 |
|
SU1539775A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2102788C1 |
| Устройство для контроля состояний сложных динамических систем | 1989 |
|
SU1725231A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2105343C1 |
| Устройство для иерархического ситуационного управления | 1989 |
|
SU1725185A1 |
Изобретение относится к автоматическому контролю и управлению смежными техническими объектами с дискретным характером технологического цикла и может быть использовано для распознавания критических ситуаций, связанных с неадекватной динамикой контролируемых процессов. Цель изобретения - повышение достоверности контроля. Устройство содержит регистры 1 и 2, блоки памяти 3 и 4, блок 5 элементов сложения по модулю два, элементы И 61-6п, 71-7п, генератор 8 тактовых импульсов, элементы ИЛИ 9 и 10 и ИЛИ-НЕ 11. На основании изучения динамических свойств и алгоритма функционирования объекта контроля для каждой ситуации SI, определяется множество R(SI) допустимых переходов SI→SK (SK*98эR(SI)). В процессе контроля корректность ситуационной динамики проверяется с помощью динамических инвариантов α(SI) и β(SI), вычисляемых по формулам:α(SI)= @ P(SJ))V( @ P(S)), J=CJ/SI*98эR(SJ)}, β(SI)= @ P(SJ))V @ P(SJ)), I={J/SJ*98эR(SI)*98), где P(SI) - код ситуации, а P(SI) - его инверсия. 1 ил.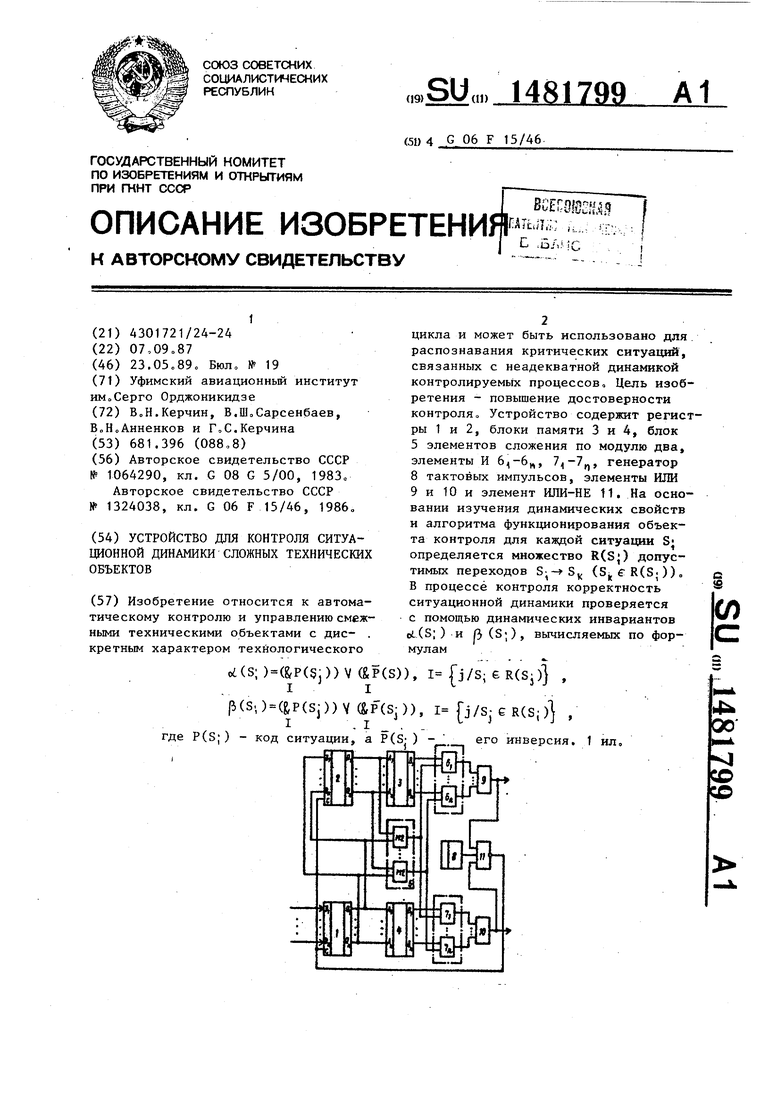
Изобретение относится к области автоматического контроля и управления сложными техническими объектами с дискретным характером технологического цикла и может быть использовано для распознавания критических ситуаций, связанных с неадекватной динамикой контролируемых процессов,
Цель изобретения - повышение до- стоверности контроля.
Характерной особенностью сложных технических систем как объектов контроля является то, что текущее состояние системы X(t)c имеющимся на- бором двоичных признаков характеризуется лишь с точностью до некоторых подмножеств Sj множества X возможных состояний системы,, Такие подмножества называются ситуация- ми, а соответствующие им вектора значений двоичных признаков P(S;) (P, , ..., Р) - кодами ситуаций.
Неопределенность истинного состояния системы в ситуации S; и асинхрон-
(з/8;еа( ;
|(Si)))V )), X {j/SjGROj) ,
et(s;)-(bP(s;))V &P(S)), i- i i
35
40
I I
где P(Sj) - код ситуации S- , a P(S: ) - его инверсия
oi-инвариант oi(S;) содержит единицы во всех тех разрядах, которые совпадают для всех векторов P(S ) - таких, что S ,€R(S:), а В-инвариант J5(Sj) в тех разрядах, которые совпадают для всех векторов P(Sj) - таких, что SjeR(Sj). Необходимые условия корректности ситуационной динамики, . условия соответствия реализовавшихся переходов допустимым, в этом случае могут быть описаны выражениями
oUS(t)) & (P(S(t))©P(S(t-1)))«0,
(3)
0(s(t-i)H (P(s(t))©p(s(t-i)))o
(4)
50
и сформулированы следующим образом:
переход S(t-1)(t) является недопустимым, если изменение ситуации S()SJ на ситуацию S(t)SK повлекло за собой изменение хотя бы одного 55 из разрядов кода ситуации, определяемых динамическими инвариантами об(SK) и pi(S;) этих ситуаций о В этом случае фиксируется нарушение нормального
45
функционирования кон темы
Перекрестный конт S(t) no (J-инварианту и ситуации S() no туации S(t) позволяе
полнительные недопус уменьшая тем самым к второго рода и повыш осуществляемого конт
На чертеже привед ства.
Устройство содерж второй 2 регистры, п 4 блоки памяти, блок жения по модулю два, вторые 7,-7h элемент тактовых импульсов, 10 элементы ИЛИ и эл
Настройка (програ лагаемого устройства ду конкретного объек ществляется заданием туации SJ, встречающ ческом цикле объекта жества допустимых пе вычислением в соотве ниями (1) и (2) дина
ный характер протекающих процессов ведет к тому, что установить детерминированную связь S(t-1)(t) не всегда удается даже при известном алгоритме функционирования системы. Для таких систем определить, какая ситуация возникает на следующем этапе, если в текущий момент реализовалась ситуация S(t)S , обычно можно лишь с точностью до некоторого подмножества R(S;) множества возможных ситуаций S {S;T , Таким образом, множество R(S;) определяет множество допустимых переходов S Для каждой ситуации S; R(S; ) может быть определено априорно на основании излучения динамических свойст и алгоритма функционирования конкретного объекта контроля. Динамическими инвариантами ситуации S; (соответственно входящим и исходящим) являются n-разрядные двоичные вектора oL (S; ) и p(S-), вычисляемые в соответствии со следующими выражениями
, S(SKeR(S;)). множество
(1) (2)
5
0
0
5
5
функционирования контролируемой системы
Перекрестный контроль ситуации S(t) no (J-инварианту ситуации S(t-1) и ситуации S() nooi-инварианту ситуации S(t) позволяет обнаружить до-
полнительные недопустимые переходы, уменьшая тем самым количество ошибок второго рода и повышая достоверность осуществляемого контроля.
На чертеже приведена схема устройства.
Устройство содержит первый 1 и второй 2 регистры, первый 3 и второй 4 блоки памяти, блок 5 элементов сложения по модулю два, первые 6ц-6 и вторые 7,-7h элементы И, генератор 8 тактовых импульсов, первый 9 и второй 10 элементы ИЛИ и элемент ИЛИ-НЕ 11.
Настройка (программирование) предлагаемого устройства на реальную среду конкретного объекта контроля осуществляется заданием для каждой ситуации SJ, встречающейся в технологическом цикле объекта контроля, множества допустимых переходов R(Sj) и вычислением в соответствии с выражениями (1) и (2) динамических инвариантов oi(S;) и R(S; ), которые заносятся в блоки 3 и 4 по адресу, определяемому кодом ситуации P(S;). После этого устройство готово к работе„
Устройство работает следующим образом.
Текущий вектор двоичных признаков (код ситуации), поступающий от объекта контроля на информационные входы регистра 1, по заднему фронту очередного тактового импульса с выхода элемента 11 заносится в регистр 1. Код ситуации P(S(t-l)), записанный на предшествующем такте, переносится при этом в регистр 2. В блоке 5 коды ситуаций P(S(t)) и P(S(t-1)) поразрядно суммируются по модулю два«, Их сумма поступает на вторые входы элементов 6 и 7, где логически умножается соответственно на ft-инвариан ситуации S(t-1)) иod-инвариант ситуации S(t), выбираемые по кодам ситуаций из блоков 3 и 4 о Вычисляются правые части выражений (3) и (4).
Если на выходе хотя бы одного элемента 6 сигнал имеет единичный уровень (т.е. нарушается необходимое условие корректности ситуационной динамики (4), то элементом 9 формируется сигнал единичного уровня на первом контрольном выходе устройства Этим же сигналом блокируется прохождение тактовых импульсов через элемент 11 на синхровходы регистров. Аналогично, если сигнал единичного уровня появляется на выходе хотя бы одного элемента 7 - нарушение условия (3), то формируется сигнал единичного уровня на втором контрольном выходе устройства и также блокируется прохождение тактовых импульсов на синхровходы регистров. При нулевом уровне сигналов на обоих контрольных выходах устройства поступление тактовых импульсов на синхровходы регистров продолжается, обеспечивая тем самым непрерывный опрос текущей ситуации
Формула
6
3 О
бретения
Устройство для контроля ситуационной динамики сложных технических объектов, содержащее два регистра, первьй блок памяти по числу п контролируемых параметров сложного технического объекта, п первых элементов
0 И, блок элементов сложения по модулю два, генератор тактовых импульсов и два элемента ИЛИ, информационные входы первого регистра соединены с входами устройства, а выходы подсоедине5 ны к информационным входам второго регистра и к первой группе входов блока элементов сложения по модулю два, вторая группа входов которого подключена к выходам второго регистQ ра и к адресным входам первого блока памяти, выходы блока элементов сложения по модулю два подсоединены к вторым входам первых элементов И, первые входы которых связаны с выходами пер5 вого блока памяти, входы первого элемента ИЛИ соединены с выходами первых элементов И, а выход является первым контрольным выходом устройства, о тличающееся тем,
Q что, с целью повышения достоверности контроля, в него введены второй блок памяти, п вторых элементов И и элемент ИЛИ-НЕ, причем адресные входы второго блока памяти соединены с выходами первого регистра, а выходы - с первыми входами вторых элементов И, вторые входы которых соединены с выходами блока элементов сложения по модулю два, входы второго элемента ИЛИ соединены с выходами вторых элементов И, а выход является вторым контрольным выходом устройства, первый, второй и третий входы элемента ИЛИ-НЕ соединены соответственно с выходом генератора тактовых импульсов, с первым и с вторым контрольны-: ми выходами устройства, а выход подключен к синхровходам первого и второго регистров.
5
0
5
| Устройство для контроля развития критической ситуации | 1982 |
|
SU1064290A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
