(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля состояний сложных динамических систем | 1989 |
|
SU1716483A1 |
| Устройство для контроля программных автоматов | 1988 |
|
SU1571552A1 |
| Устройство для программного контроля | 1987 |
|
SU1464142A1 |
| Устройство для контроля ситуационной динамики сложных технических объектов | 1987 |
|
SU1481799A1 |
| Устройство для контроля динамики сложных систем | 1986 |
|
SU1324038A1 |
| Устройство для контроля динамики управляемых процессов цифровых систем | 1987 |
|
SU1444827A1 |
| Устройство для контроля аналоговых объектов | 1989 |
|
SU1718189A1 |
| Устройство для контроля функционирования логических блоков | 1986 |
|
SU1327107A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ЭТАЛОННОЙ КАРТЫ МЕСТНОСТИ ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 1992 |
|
RU2022355C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЦИФРОВЫХ БЛОКОВ | 1991 |
|
RU2065202C1 |
Изобретение относится к автоматике и может быть использовано в системах управления объектами с дискретным характером технологического цикла. Целью изобретения является расширение функциональных возможностей устройства за счет возможности фиксации параметрических отказов элементов сложной системы. Устройство содержит первый и второй регистры, первый и второй блоки памяти, счетчик, блок элементов СЛОЖЕНИЕ ПО МОДУЛЮ ДВА, формирователь импульсов, элемент ИЛИ, блок элементов И, элемент ИЛИ-НЕ, генератор тактовых импульсов, элемент И. 1 ил.
Изобретение относится к автоматике и может быть использовано в системах управления объектами с дискретным характером технологического цикла.
Известно устройство для контроля сложных систем, в котором выходные сигналы объекта контроля с помощью коммутатора последовательно подключаются к блоку сравнения, где сравниваются с соответствующими постоянными уставками, хранящимися в блоке памяти.
Недостатком устройства является невозможность контроля динамики функционирования сложных систем.
Известно также устройство контроля последовательности срабатывания логических схем, содержащее ряд блоков для срав- нения логических сигналов, счетчик. Устройство позволяет оптимизировать режим работы системы в каждой складывающейся ситуации 1.
Недостатком устройства является отсутствие средств компенсации нежелательных последствий переходных процессов, возникающих при изменении состояния контролируемой системы.
Наиболее близким к предлагаемому является устройство для контроля динамики сложных систем, содержащее два регистра, блок памяти, блок элементов СЛОЖЕНИЕ ПО МОДУЛЮ ДВА, блок элементов И, элемент ИЛИ и генератор тактовых импульсов
PIНедостатком данного устройства является невозможность фиксации параметрических отказов сложной системы, т.е. состояний возникающих при введении системы в статический режим работы. При возникновении параметрических отказов
ы
ю ел ю со
система не изменяет своего состояния, в результате чего устройство для контроля будет находиться в состоянии ожидания очередного состояния. Следовательно, рассматриваемое устройство не позволяет фиксировать нарушения динамики функционирования сложной системы, вызванные параметрическими отказами.
Целью изобретения является расширение функциональных возможностей устрой- ства за счет возможности фиксации параметрических отказов элементов сложной системы.
Для достижения поставленной цели в устройство для контроля сложных динами- ческих систем, содержащее первый и второй регистры, группу элементов СЛОЖЕНИЕ ПО МОДУЛЮ ДВА, первый блок памяти эталонов, группу элементов И, генератор тактовых импульсов, элемент ИЛИ, причем информационные входы первого регистра являются входами устройства для подключения выходов контролируемой системы, а выходы соединены с информационными входами второго регистра и первы- ми входами элементов .СЛОЖЕНИЕ ПО МОДУЛЮ ДВА группы, вторые входы которых связаны с выходами второго регистра и группой адресных входов первого блока памяти эталонов, а выходы соединены с вхо- дами элемента ИЛИ и с первыми входами соответствующих элементов И группы, вторые входы которых подключены к группе выходов первого блока памяти эталонов, дополнительно введены второй блок памяти эталонов, Счетчик, формирователь импульсов, элемент И и элемент ИЛИ-НЕ, первый вход которого соединен с выходом переполнения счетчика, а остальные входы - с выходами элементов И группы, выход элемента ИЛИ подключен к входу формирователя импульсов, выход которого соединен с входом управления параллельной загрузки счетчика, установочные входы которого связаны с выходами второго блока памяти эталонов, адресные входы которого соединены с выходами первого регистра, выход элемента ИЛИ-НЕ, являющийся выходом устройства, связан с первым входом элемента И, второй вход которого соединен с выходом генера- тора тактовых импульсов, а выход подключен к тактовым входам первого и второго регистров и счетному входу счетчика.
Второй блок памяти эталонов хранит коды, каждый из которых соответствует мак- симальному времени нахождения контролируемой системы в одном из возможных состояний. Счетчик отслеживает временные интервалы, соответствующие кодам, поступающим с второго блока памяти эталонов.
Формирователь импульсов по сигналу, поступающему с элемента ИЛИ (сигнал смены состояния системы), формирует импульс на загрузку в счетчик кода, соответствующего новому состоянию системы. Элемент ИЛИ- НЕ фиксирует переход системы в одно из недопустимых технических состояний или возникновение параметрического отказа, т.е. истечение времени, отведенного для данного состояния. В обоих случаях на выходе элемента появляется сигнал логического О, сообщающий о нештатном функционировании системы и блокирующий прохождение тактовых импульсов через элемент И.
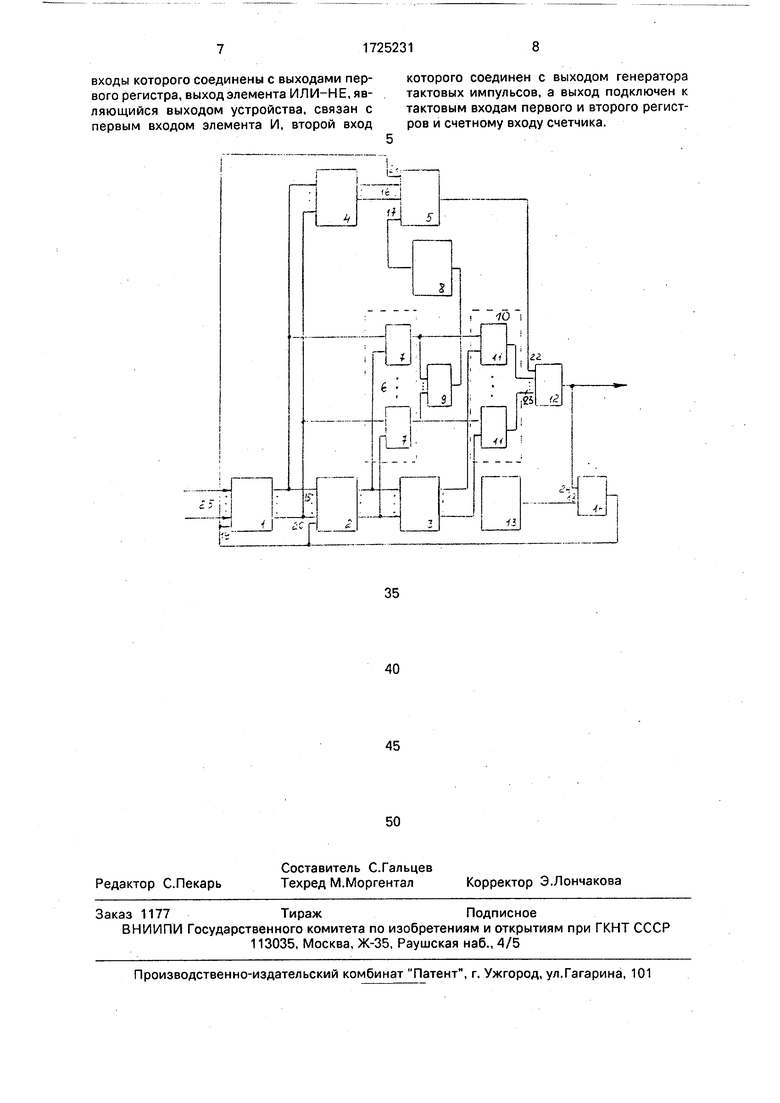
На чертеже представлена схема устройства для контроля сложных систем.
Устройство содержит первый 1 и второй 2 регистры, первый 3 и второй 4 блоки памяти эталонов, счетчик 5, группу 6 элементов СЛОЖЕНИЯ ПО МОДУЛЮ ДВА 7, формирователь 8 импульсов, элемент ИЛИ 9, группу 10 элементов И 11, элемент ИЛИ-НЕ 12, генератор 13 тактовых импульсов и элемент И 14. Выходы регистра 1 соединены с входами блока 4 памяти, группой входов 15 регистра 2 и первыми входами элементов 7 группы 6, выходы которых соединены с входами элемента 9 и первыми входами эле-, ментов 11 группы 10, вторые входы которых соединены с выходами блока 3 памяти, входы которого соединены с выходами регистра 2 и вторыми входами входов элементов 7 группы 6. Выходы блока 4 памяти соединены с группой входов 16 счетчика 5, вход 17 которого соединен с выходом формирователя 8 импульсов, вход которого подключен к выходу элемента 9. Выход генератора 13 тактовых импульсов соединен с входом 18 элемента 14, выход которого соединен с входом 19 регистра 1, с входом 20 регистра
2и с входом 21 счетчика 5, выход которого соединен с входом 22 элемента 12, группа входов 23 которого соединена с выходами группы 10, а выход элемента 12 соединен с входом 24 элемента 14 и является выходом устройства. Двоичный вектор признаков ситуации от дискретных датчиков объекта кон- тролт поступает на группу входов 25 регистра 1.
Настройка устройства на конкретную систему осуществляется загрузкой в блоки
3и 4 для каждого состояния контролируемой системы переходного инварианта и кода, характеризующего максимальное время нахождения системы в этом состоянии, соответственно. Переходный инвариант представляет собой двоичный вектор, содержащий единицы в тех разрядах, содержимое которых в кодах состояний не меняется при переходе в любое из допустимых состояний. В нулевую ячейку блока 3 памяти загружается нулевой код (т.е. первое состояние контролируемой системы всегда является допустимым). Начальное состояние обоих регистров - нулевое. В счетчик 5 загружен код, обеспечивающий низкий потенциал на его выходе.
Устройство работает следующим образом.
По срезу (перепад с высокого уровня на низкий) первого тактового импульса в регистр 1 запишется код текущего состояния, поступающий на группу входов 25 регистра с выходов контролируемой системы, а в регистр 2 - предыдущий код регистра 1, т.е. нулевой, после чего на выходе элемента 9 появится сигнал рассогласования, который запустит формирователь 8 импульсов. В результате в счетчик 5 будет загружен код, соответствующий максимальному времени нахождения системы в состоянии, код которого оказался на регистре 1. По каждому следующему тактовому импульсу изменяется содержимое счетчика, код, хранящийся на регистре 1, переписывается на регистр 2, а в регистр 1 записывается новый код состояния. На элементах 7 группы б происходит сравнение кодов, записанных на регистрах 1 и 2. Если они совпадают, то изменений в режиме работы устройства не происходит. Это продолжается до тех пор, пока не произойдет смены состояния контролируемой системы или на выходе счетчика 5 не появится сигнал высокого уровня. Последний, поступая на вход 22 элемента .устанавливает нулевой потенциал на его выходе, что сигнализирует о нештатном функционировании системы. В случае несовпадения кодов, записанных на регистрах 1 и 2 (смене состояния системы), на выходах элементов 7 группы 6, соответствующих изменившимся разрядам, появится сигнал высокого уровня, который через элемент 9 поступит на вход формирователя 8 импульсов. В результате в счетчик 5 будет загружен код, соответствующий новому состоянию контролируемой системы. Вместе с тем сигналы рассогласования с выходов элементов 7 группы 6 поступают на первые входы соответствующих элементов 11 группы 10, на вторые входы которых поступает переход ной инвариант, выбираемый из блока 3 памяти по адресу, записанному на регистре 2. Таким образом, на элементах 11 группы 10 проверяется условие допустимости данной смены состояний. Если произошла недопустимая смена состояний в контролируемой системе, то на выходе блока 12 появляется сигнал низкого уровня, блокирующий прохождение импульсов через элемент 14 и сообщающий о нештатном функционировании системы. Анализ содержимого регистров позволяет определить характер
неисправности, возникшей в системе.
Блоки 1-3, 6, 10 и 13 являются элементами прототипа, причем их функциональное назначение, а также количество входов и выходов не изменяются.
Блок 4 аналогичен блоку 3 прототипа.
Блок 5 является счетчиком с возможностью параллельной загрузки и может быть выполнен на базе интегральных микросхем, например, серии К155.
Формирователь 8 импульсов может быть выполнен на базе интегральных микросхем, например, К155АГ1.
Блоки 12 и 14 являются известными элементами дискретной техники и могут быть
выполнены на базе интегральных микросхем.
Ф о р м у л а и з о б р ет е н и я
Устройство для контроля состояний сложных динамических систем, содержащее первый и второй регистры, группу элементов СЛОЖЕНИЕ ПО МОДУЛЮ ДВА, первый блок памяти эталонов, группу элементов И, генератор тактовых импульсов, элемент ИЛИ, причем информационные входы первого регистра являются входами устройства для подключения выходов контролируемой системы, а выходы соединены с
информационными входами второго регистра и первыми входами элементов СЛОЖЕНИЕ ПО МОДУЛЮ ДВА группы, вторые входы которых связаны с выходами второго регистра и группой адресных входов первого блока памяти эталонов, а выходы соединены с входами элемента ИЛИ и с первыми входами соответствующих элементов И группы, вторые входы которых подключены к группе выходов первого блока памяти эталонов, отличающееся тем, что, с целью расширения функциональных возможностей устройства путем обеспечения возможности фиксации параметрических отказов элементов сложной системы, в него введены второй блок памяти эталонов, счетчик, формирователь импульсов, элемент И и элемент ИЛ И-НЕ, первый вход которого соединен с выходом переполнения счетчика, а остальные входы - с выходами элементов И
группы, выход элемента ИЛИ подключен к входу формирователя импульсов, выход которого соединен с входом управления параллельной загрузки счетчика, установочные входы которого связаны с выходами второго блока памяти эталонов, адресные
входы которого соединены с выходами первого регистра, выход элемента ИЛИ-НЕ, являющийся выходом устройства, связан с первым входом элемента И, второй вход
которого соединен с выходом генератора тактовых импульсов, а выход подключен к тактовым входам первого и второго регистров и счетному входу счетчика.
.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЗАМОК ПРОТИВОУГОННОГО УСТРОЙСТВА | 2005 |
|
RU2292276C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для временного контроля сигналов интерфейса | 1986 |
|
SU1324028A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
