Изобретение относится к вседози- рующей технике и может быть использовано в системе непрерывного авто- м 1тического дозирования сьшуних ма- трриалов в цементной, горной, дорож- нЬ-строительной и других отраслях промьшшенности.
Цель изобретения - повышение точ- Н|0сти дозирования путем учета инерционности системы.
На чертеже изображена схема весового .дозатора непрерьганого действия. Весовой дозатор непрерьшного действия содержит установленный под бункером питатель 1 с приводным двигателем 2 и редуктором 3. Двигатель 2 подключен к статическому частотному преобразователю 4 питателя, к которому подключен второй блок 5 съема сигнала по скорости движения полотна питателя. Материал с ленты питателя гоступает на ленту весового транспортера 6, который связан с приводным .вигателем 7 и редуктором 8.
Двигатель 7 весового транспортера ( подключен к первому статическому :астотному преобразователю 9 весового транспортера, к которому подключе первый блок 10 съема сигнала по скорости движения полотна весового транспортера. Первый выход блока 10 подключен к третьему элементу 11 уравнения, к второму входу элемента фравнения подключен выход блока 5, А выход элемента сравнения подключен к статическому преобразователю 4 питателя. Второй выход блока 10 йодключен к множительно-преобразую- аему устройству 12, к. которому также .Подключен выход датчика 13 усилия.
Выход множительно-преобразующего устройства 12 подключен к первому элементу 14 сравнения и интегратору 15 напряжение - частота, к выходу которого подключен счетчик 16, к другому входу элемента сравнения 14 подключен выход задатчика 17. Выход элемента 14 сравнения подключен к операционному усилителю.18, выход которого подключен к статическому частотному преобразователю 9. Второ выход задатчика подключен к блоку 19 согласования, выход которого соединен, с вторым элементом 20 сравнения, к втор-ому входу которого подключен выход интегратора.15, а выхо элемента. 20 сравнения подключен к статическому преобразователю 9.
0
5
0
Весовой.дозатор непрерывного действия работает следующим образом. Материал из бункера питателя 1 поступает в приемную воронку весового транспортера 6. Значение массы материала на ленте весового транспортера 6 преобразуется датчиком 13 усилия в значение напряжения переменного тока. Этот сигнал, а также сигнал с блока 10 съема сигнала по скорости движения весового транспортера поступает на вход множительно-преобразующего устройства 12. Сигнал с выхода 5 множительно-преобразующего устройства 12 поступает на вход элемента 14 сравнения, где сравнивается с задающим сигналом, поступающим с задатчика 17. При появлении на весовом транспортере веса, отличного от заданного задатчиком 17, элемент сравнения подает сигнал рассогласования, который поступает на вход операционного усилителя 18. С операционного усилителя сигнал рассогласования поступает на статический частотный преобразователь 9 весового транспортера, а затем на приводной двигатель 7, что приводит к изменению скорости ленты весового транспортера 6. Производительность дозатора регистрирует интегратор 15 напряжение - частота и счетчик 16. Регулирование скорости ленты питателя осуществляется следующим образом. Напряжение с блока 10 подается на.элемент сравнения 11, на который одновременно поступает сигнал с блока 5. При неравенстве сигналов вьщеляется сигнал рассогласования, который поступает на статический частотный преобразователь 4, который при этом изменяет свои выходные параметры, в результате чего изменяется частота вращения двигателя 2 питателя 1. При этом на весовом транспортере 6 изменяется количество материала. Однако заданная производительность дозатора сразу на достигается в силу инерционности системы. Операция управления повторяется, в результате чего появляется погрещ- ность в дозировании. С интегратора 15 подается сигнал фактического значения производительности на элемент 20 сравнения, сюда же с задатчика 17 через блок 19 согласования подается сигнал заданной производительности. При рассогласовании сигналов появляется результирующий сигнал, кото5
0
5
50
55
рый позиоляет компенсировать погрешность дозирования, полученную в результате управления системой.
Ф
ормула изобретен Весовой дозатор непрерывного действия, содержащий последовательно соединенные приводной двигатель питания, редуктор питателя и питатель, а также последовательно соединенные приводной двигатель весового транспортера, редуктор весового транспортера и весовой транспортер, связанны с датчиком усилия, выход которого через последовательно соединенные множительно-преобразуюпще устройство и интегратор напряжение - частота подключен к входу счетчика, задатчик и операционный усилитель, отличающийся тем, что, с целью повьппения точности дозирования путем учета инерционности системы, в него введены три элемента сравнения, два статических частотных преобразователя, два блока съема сигнала по ског рости и блок согласования, причем выход множительно-преобразующего устройства соединен с первым входом
ервого элемента сравнения, вторым входом подключенного к первому выходу задатчика, а выходом через операцион- ный усилитель г- к первому входу первого статического преобразователя частоты, вторым входом соединенного с выходом второго элемента сравнения, а выходом - с входом приводного дви- гателя весового транспортера и с входом первого блока съема сигнала по скорости, первый выход которого подключен к первому входу третьего элемента сравнения, а второй выход сое- динен с вторым входом множительно- преобразующего устройства, второй выход задатчика через блок согласования подключен к первому входу второго элемента сравнения, вторым вхо- дом соединенного с выходом интегратора напряжение - частота, при этом второй вход третьего элемента срав нения подключен к выходу второго блока съема сигнала по скорости, а выход через второй статический преобразователь частоты соединен с входом приводного двигателя питателя и с входом второго блока съема сигнала по скорости.

| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывного действия | 1977 |
|
SU746197A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1310643A1 |
| Весовой дозатор непрерывного действия | 1981 |
|
SU979876A1 |
| Дозатор сыпучих материалов | 1988 |
|
SU1571413A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1265486A1 |
| Устройство управления весовым дозатором непрерывного действия | 1982 |
|
SU1016685A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Дозатор непрерывного действия | 1980 |
|
SU934234A1 |
Изобретение может .быть использовано в системе непрерывного автоматического дозирования сьшучих материалов. Цель изобретения - повышение точности дозирования путем учета инерционности системы. Значение массы материала на транспортер 6 преоб- ра уется датчиком 13 усилия в значение напряжения переменного тока. Этот сигнал так же,как и сигнал с блока 10 съема сигнала по скорости транспортера , поступает на вход мно- жительно-преобразующего устройства 12, с выхода которого сигнал поступает на элемент 14 сравнения, где .сравнивается с задающим сигналом с задатчика 17. Сигнал рассогласования поступает на преобразователь 4, изменяющий выходные параметры и соответственно частоту вращения двигателя 2 питателя 1 и количество материала на транспортере 6. С интегратора 15 подается сигнал фактического значения производительности на элемент 20 сравнения, сюда же с за- . датчика 17 подается сигнал заданной производительности. При рассогласовании полученный сигнал компенсирует погрешность дозирования. 1 ил. (О ел 4 01 СП 4 4j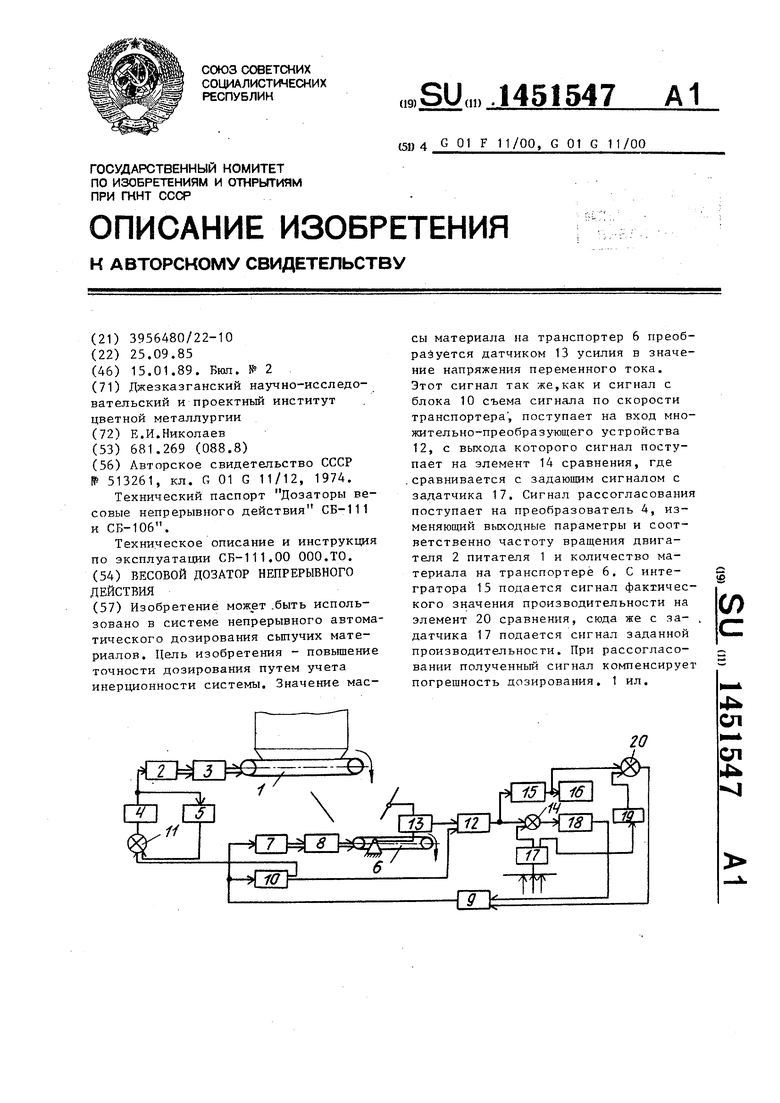
| Устройство для измерения весового расхода сыпучих материалов | 1974 |
|
SU513261A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Говорящий кинематограф | 1920 |
|
SU111A1 |
