4i 4ib
С71
00
СО
°
15
Изобретение относится к автоматизации прокатного производства и может быть использовано на обжимных станах при двухслитковой прокатке.
Целью изобретения является повышение надежности и уменьшение износа оборудования путем снижения динамических нагрузок в электромеханической системе электропривода.Ю
На фиг. 1 представлена структурная схема системы автоматического управления электроприводом обжимного стана; на фиг. 2 - временные диаграммы срабатываний элементов системы.
Система автоматического управления электроприводом обжимного стана содержит электродвигатель 1, со эди- ненный через механическую передачу 2 с валками 3 прокатной клети. Электродвигатель 1 соединен с подчиненным контуром 4 регулирования тока. Контур регулирования скорости объединяет электродвигатель 1, контур 4 регенирования тока и регулятор 5 скорости, состоящий из операционно- го усилителя 6 и ЕС-цепи обратной связи. Параллельно цепи обратной связи подсоединена цепочка, состоящая из соединенных последовательно резистора 7 с регулируемым сопротивлением и второго резистора 8 с постоянным сопротивлением. Управляющий вход резистора 7 подсоединен к выхоключатели 19-21, элементы И 22 и 23 и RS-триггер 24, причем входы элеме тов ИЛИ-НЕ 17 и 18 соединены с первым и вторым входами логического бл ка 10 управления соответственно, а также с первым и вторым контактам переключателя 19 соответственно. П рекидной контакт переключателя 19 соединен к первому входу элемента И 22. Выходы элементов ИЛИ-НЕ 17 и соединены с первым и вторым контак тами переключателя 20 соответствен Перекидной контакт переключателя 2 подсоединен к первому входу элеме И 23. Управляющие входы переключат лей 19 и 20 соединены с третьим вх дом логического блока 10 управлени Первый и второй входы переключателя 21 соединены с вторыми входами эл ментов И 22 и 23 соответственно. В ходы элементов И 22 и 23 подсоедин ны к входам RS-триггера 24, выход которого соединен с выходом логиче 25 кого блока 10 управления. Перекидн контакт переключателя 21 соединен четвертым входом логического блока 10 управления, а управляющий вход с пятым входом логического блока 1 управления.
Система управления электроприво дом обжимного стана работает следу щим образом.
При направлении прокатки, указа
20
30
ду интегратора 9, вход которого сое- з5 ° стрелкой на фиг. 1, напряжение
динен с выходом логического блока 10 управления. Первый вход логического блока 10 управления. Первый вход логического- блока 10 управления соединен с выходом первого датчика 11 по- 40 ложения слитка, расположенным перед прокатной клетью до ходу прокатки, второй вход - с выходом второго датчика 12 положения слитка, расположенным за прокатной клетью по ходу 45 прокатки. Третий вход логического блока 10 управления соединен с выходом датчика 13 направления прокатки, вход которого соединен с выход(м датчика 14 скорости и с входом регуля- р тора 5 скорости. Четвертый вход логического блока 10 управления соединен с выходом датчика 15 статического тока, подсоединенного к подчиненному контуру 4 регулирования тока, а пя- с тый вход - с выходом счетчика 16 слитков,
Логиг еский блок 10 управлен ля содержит элементы 17 и 18, перена выходе датчика 13 направления прокатки и на выходе счетчика 16 слитков равно нулю, скорость элект родвигателя 1 соответствует скорос захвата слитка, а ток равен току холостого хода. Напряжения на выход датчиков 11 и 12 положения слитка соответствуют логической 1. При достижении передним концом первого слитка валков 3 клети обжимного ста на, что соответствует моменту време ни t., на фиг. 2, напряжение на выхо датчика 11 положения слитка станови ся равным логическому О. При это состояние элементов логического бло ка 10 управления следующее. Напряже ние логической 1 с первого входа логического блока 10 управления через переключатель 19 подается на пе вый вход элемента И 22, а на первом входе элемг.чта И 23 напряжение отсу ствует, т.е. равно логическому О так как он отключен от датчика 15 статического тока. На второй вход
5
ключатели 19-21, элементы И 22 и 23 и RS-триггер 24, причем входы элементов ИЛИ-НЕ 17 и 18 соединены с первым и вторым входами логического блока 10 управления соответственно, а также с первым и вторым контактами переключателя 19 соответственно. Перекидной контакт переключателя 19 подсоединен к первому входу элемента И 22. Выходы элементов ИЛИ-НЕ 17 и 18 соединены с первым и вторым контактами переключателя 20 соответственно. Перекидной контакт переключателя 20 подсоединен к первому входу элемента. И 23. Управляющие входы переключателей 19 и 20 соединены с третьим входом логического блока 10 управления. Первый и второй входы переключателя 21 соединены с вторыми входами элементов И 22 и 23 соответственно. Выходы элементов И 22 и 23 подсоединены к входам RS-триггера 24, выход которого соединен с выходом логичес- 5 кого блока 10 управления. Перекидной контакт переключателя 21 соединен с четвертым входом логического блока 10 управления, а управляющий вход - с пятым входом логического блока 10 управления.
Система управления электроприводом обжимного стана работает следующим образом.
При направлении прокатки, указан0
0
° стрелкой на фиг. 1, напряжение
на выходе датчика 13 направления прокатки и на выходе счетчика 16 слитков равно нулю, скорость электродвигателя 1 соответствует скорости захвата слитка, а ток равен току холостого хода. Напряжения на выходах датчиков 11 и 12 положения слитка соответствуют логической 1. При достижении передним концом первого слитка валков 3 клети обжимного стана, что соответствует моменту времени t., на фиг. 2, напряжение на выходе датчика 11 положения слитка становится равным логическому О. При этом состояние элементов логического блока 10 управления следующее. Напряжение логической 1 с первого входа логического блока 10 управления через переключатель 19 подается на первый вход элемента И 22, а на первом входе элемг.чта И 23 напряжение отсутствует, т.е. равно логическому О, так как он отключен от датчика 15 статического тока. На второй вход
элемента И 22 поступает напряжение логического О с выхода датчика 15 статического тока через перекидной контакт переключателя 21, а на управ- ляющий вход переключателя 21 поступает напряжение логического О с пятого входа логического блока 10 управления.
24 изменяет свое состояние и на его выходе появляется сигнал логической 1. Этот сигнал поступает на вход интегратора 9. Напряжение на выходе интегратора 9 увеличивается с темпом, определяемым его постоянной интегрирования. Сопротивление резистора 7 изменяется с такой же постоян


| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления электроприводом обжимного стана | 1990 |
|
SU1745386A1 |
| Способ уменьшения ударов в кинематической линии клети прокатного стана и устройство для его осуществления | 1990 |
|
SU1819167A3 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ВАЛКОВ ПРОКАТНОЙ КЛЕТИ | 1989 |
|
SU1665598A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| Устройство для регулирования скорости реверсивного прокатного стана с вертикальными и горизонтальными валками | 1980 |
|
SU956082A1 |
| Устройство для управления главным электроприводом клети непрерывного прокатного стана | 1982 |
|
SU1026870A1 |
| Устройство для управления манипуляторными линейками реверсивного прокатного стана | 1984 |
|
SU1217512A1 |
| Бесконтактное устройство для фиксации моментов захвата и выброса слитка из валков прокатного стана | 1976 |
|
SU698690A1 |
| Способ лыжеобразования слитка на реверсивном стане горячей прокатки с индивидуальным приводом валков и устройство для его осуществления | 1990 |
|
SU1759491A1 |
| Устройство для управления скоростью клетей непрерывного стана холодной прокатки полосы | 1990 |
|
SU1752461A1 |

Изобретение относится к автоматизации прокатного производства и может использоваться на обжимных станах при двухслитковой прокатке. Цель изобретения - повышение надежности работы электропривода и уменьшение износа оборудования путем снижения динамических нагрузок в электромеханической системе электропривода. С этой целью осуществляется переключение структуры регулятора 5 скорости с пропорционально-интегральной на пропорциональную при помощи шунтиро- .вания цепи обратной связи цепочкой из последовательно соединенных резистора 7 с регулируемым сопротивлением и резистора 8 с постоянням сопротивлением. Для осуществления плавных переключений предусмотрен интегратор 9. Моменты переключений определяются с помощью логического блока 10 управления, воспринимающего сигналы с датчика 13 направления прокатки, датчиков 11 и 12 положения слитков, датчика 15 статического тока и счетчика 16 слитков, 1 з. п. ф-лы, 2 ил. с $ (Л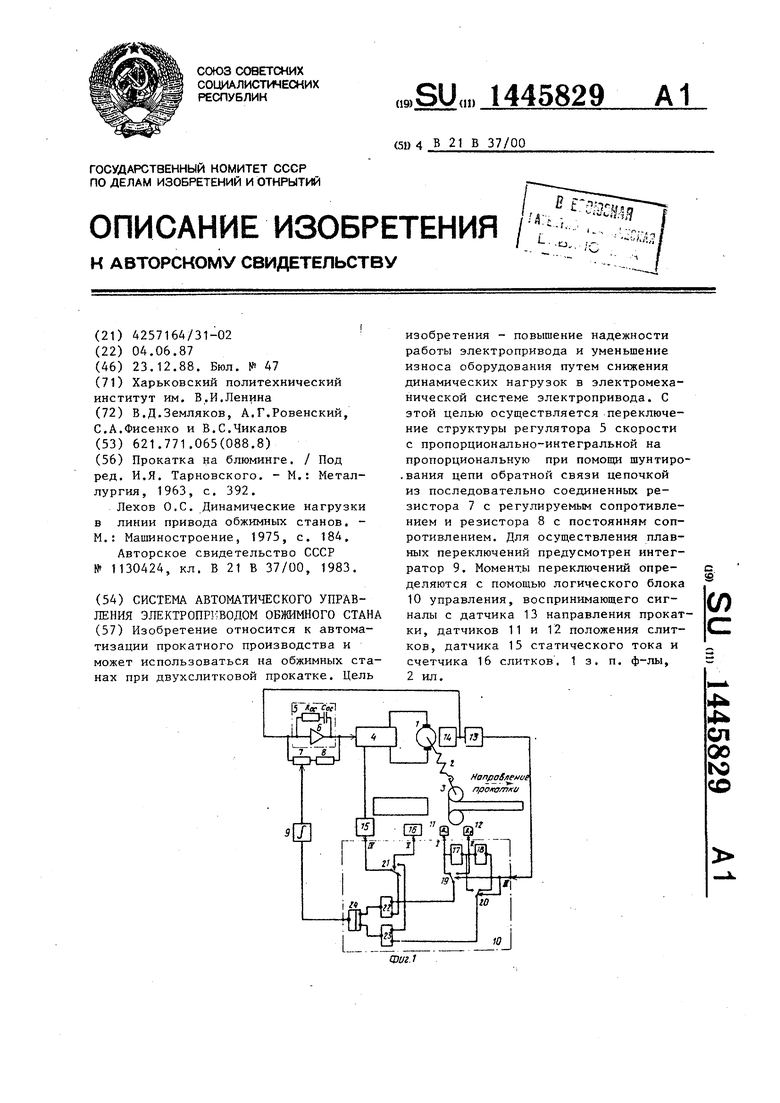
На входах элементов И 22 и 23 нап- Ю ной времени до нуля. При этом сопроряжения равны логическому О, на выходе RS-триггера 24 также появляется напряжение, равное логическому О. Таким образом в момент времени t.
тивление цепи обратной связи регулятора 5 скорости становится равным сопротивлению резистора 8. Коэффициент усиления регулятора 5 скорости плавно снижается до величины, обусловленной величиной сопротивления резистора 8, что обеспечивает уменьшение жесткости механической характеристики электропривода.
(фиг. 2) напряжение на выходе логи- ческого блока 10 управления равно нулю. Так как на входе интегратора 9 сигнал отсутствует, то на управляющем входе первого резистора 7 с регулируемым сопротивлением напряжение равно нулю. При этом сопротивление резистора 7 имеет максимальную величину и значительно превышает сопротивление цепи обратной связи регулятора 5 скорости. Цепочка, состоящая из резисторов 7 и 8, не влияет на работу системы регулирования скорости.
Во время прокатки первого слитка напряжение на выходе датчика 15 статического тока равно логической IV Напряжение на выходе логического блока 10 управления остается равным нулю, так как напряжение на выходе счетчика 16 слитков равно нулю, и перекидной контакт переключателя 21 соединяет выход датчика 15 статического тока с вторым входом элемента И 22, на первом входе которого присутствует напряжение логического О, поступающее через переключатель 19 с выхода датчика 11 положения слитка. Поэтому на выходах элементов И 22 и 23 напряжение не изменяется.
В данном положении система авто- матического управления находится до момента времени tj, когда задний конец первого слитка достигает датчика 11 положения слитка. После срабатывания датчика 11 положения слитка на его выходе появляется напряжение, равное логической 1, которое поступает на первый вход элемента И 22, на втором входе которого присутствует сигнал логического О, так как слиток продолжает находится в валках На выходе элемента И 22 появляется сигнал логической 1, поступающий на вход RS-триггера 24. RS-триггер
тивление цепи обратной связи регулятора 5 скорости становится равным сопротивлению резистора 8. Коэффициент усиления регулятора 5 скорости плавно снижается до величины, обусловленной величиной сопротивления резистора 8, что обеспечивает уменьшение жесткости механической характеристики электропривода.
Таким образом при прокатке конца первого слитка структура регулятора 5 скорости изменяется с пропорционально-интегральной на пропорциональную с пониженным коэффициентом усиления, что обеспечивает подтормаживание электродвигателя 1 перед выходом из валков прокатной клети первого слитка. Тем самым осуществляется снижение динамических нагрузок в электромеханической системе электропривода и формируются благоприятные начальные условия для захвата второго слитка. В момент времени t (фиг. 2) передний конец второго слитка подходит к вал- кам и срабатывает датчик 11 положения слитка. На его выходе появляется сигнал логического О. Перекидной контакт переключателя 21 соединяет выход датчика 15 статического тока с
вторым входом элемента И 23 и на нем появляется напряжение логической 1. На первом входе элемента И 23 напряжение равно логическому О.
Б момент времени t (фиг. 2) передний конец второго слитка достигает датчика 12 положения слитка, на выходе которого появляется сигнал логического О. При этом на первый вход элемента И 23 подается сигнал логической 1 с выхода элемента Ш1И-НЕ 18. Таким образом на выходе элемента И 23 формируется сигнал логической 1, а на выходе RS-триггера 24 - сигнал логического О. Это напряжение подается на вход интегратора 9, и на его выходе напряжение спадает к нулю, а сопротивление резистора 7 плавно изменяется от минимального значения до максимального.
Коэффициент усиления регулятора скорости плавно восстанавливается, а жесткость механической характеристики восстанавливается до первоначальной, Регулятор 5 скорости изменяет свою структуру на пропорциональную. Таким образом захват второго слитка происходят на мягкой механической характеристике электропривода без аварийных бросков тока, которые могут привести к отказам электропривода, что повышает надежность его работы.
При изменении направления прокатки -на выходе датчика 13 направления прокатки появляется сигнал логической 1 и переключатели 19 и 20 перебрасываются в другое положение, изменяя на противоположное подключение датчиков 11 и 12 положения слитка. Во всем остальном система работает аналогично предыдущему пропуску слитков.
Предлагаемая система автоматического управления электроприводом об- жимного стана в отличие от изв естной за счет снижения динамических нагрузок позволяет увеличить межремонтные циклы работы элементов и узлов глав- ной линии электропривода обжимного стана, т.е. снизить простои. Кроме того, улучшение условий захвата слитка валками прокатной клети снижает вероятность пробуксовок и неустойчивых режимов прокатки, что способствует повьшению производительности обжимного стана.
Формула изобретения
прокатки, два датчика положения слитка, расположенных перед прокаткой клетью и за ней соответственно, датчик статического тока, соединенный с подчиненным контуром регулирования тока, отличающаяся тем, что, с целью повьпиения надежности и уменьшения износа оборудования путем снижения динамических нагрузок в электромеханической системе электропривода она снабжена логическим блоком управления, счетчиком слитков и интегратором, а параллельно цепи
обратной связи регулятора скорости подсоединены соединенные последовательно два резистора, один из которых, регулируемый,- с выходом интегратора, вход которого соединен с выходом логического блока управления, входы которого соединены соответственно с выходами первого и второго датчиков положения слитка, датчика направления прокатки, датчика статического тока и счетчика слитков.
переключатель соединен с первым и
вторым входами блока, первый вход вто- jBToporo элемента И через второй переключатель соединен с выходами элементов ИЛИ-НЕ, входы которых соединены с
с первым и вторым входами блока, третий вход блока является первым управляющим входом, соединенным с первьгм и вторым переключателями, четвертый вход блока через третий переключатель
соединен с вторыми входами элементов И, пятый вход блока является вторым управляющим входом, соединенным с третьим переключателем.
| Прокатка на блюминге | |||
| / Под ред | |||
| И.Я | |||
| Тарновского | |||
| - М.: Металлургия, 1963, с | |||
| Прибор для нанесения на чертеж точек при вычерчивании углов и треугольников | 1922 |
|
SU392A1 |
| Лехов О.С | |||
| Динамические нагрузки в линии привода обжимных станов | |||
| - М.: Машиностроение, 1975, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
