(Л
4
4
сл
;&
4
4;
Фиг.1
Изобретение относится к станкостроению и может найти применение в манипуляторах для перемещения рабочего органа.
Цель изобретения - повышение надежности за счет устранения влияния динамических нагрузок на рабочий орган и обеспечение его регулировочных перемещений.
На фиг. 1 показана кинематическая схема манипулятора; на фиг. 2 - то же, вариант.
Манипулятор содержит установленные на основании 1 направляющие 2 поступательного перемещения каретки 3 от привода (не показан), двигатель 4 со шкивом 5 передачи с гибкой связью, натяжное устройство 6 и направляющие ролики 7-10. На каретке 3 закреплены с возможностью вращения две пары роликов 11, 12 и 13, 14, а также установлены направляющие 15 поступательного перемещения рабочего органа 16. На последнем установлены два ролика 17 и 18. Гибкий элемент 19 указанной передачи выполнен разомкнутым, оба его конца закреплены на осноании 1. Верхняя ветвь элемента 19 огибает ролики 11, 17 и 12, а затем ролики 7 и 8. Нижняя ветвь элемента 19 огибает ролики 13, 18 и 14, а затем ролики 9 и 20 натяжного устройства 6 и ролик 10. Гибкий элемент 19 охватывает шкив 5. От основания 1 до шкива 5 обе ветви гибкого элемента имеют участки, параллельные направляющим 2 и 15.
Манипулятор работает следующим образом.
При включении двигателя 4 врашение шкива 5 заставляет одну из ветвей гибкого элемента 19 удлиняться, а другую, соответственно, укорачиваться. Возникающие при этом усилия перемещают рабочий орган 16 по направляющим 15. При этом длины горизонтальных участков ветвей гибкого элемента 19 остаются неизменными, а рабочий орган перемещается к верхней или к нижней ветви в зависимости от направления вращения двигателя 4. Перемещение каретки 3 по направляющим 2 не приводит к изменению длин верхней и нижней ветвей, вследствие чего рабочий орган 16
остается неподвижным относительно каретки 3 (независимо от динамических режимов ее перемещения: ускорения, рывки, остановки и т. д.), т. е. указанные два перемещения независимы один от другого. Контролируя углы поворота шкива 5, можно управлять перемещениями, в том числе регулировочными (при наладке) перемещениями рабочего органа 16. Если верхняя ветвь огибает ролик 18, а нижняя - ролик 17
0 (фиг. 2), перемещение рабочего органа 16 из одного крайнего положения в другое (т. е. рабочий ход), ограничиваемое в каждом крайнем положении началом распределения укорачивающейся ветви, максимальное
5 при заданных расстояниях между роликами 17 и 18 рабочего органа 16 и между парами роликов каретки 3. Размещение роликов 11 -14 по углам прямоугольника (фиг. 2) создает условия для увеличения хода S рабочего органа 16. В неко0 торых компоновках можно совместить натяжное устройство 6 с двигателем 4 и шкивом 5 (фиг. 2, двигатель установлен с возможностью перемещения по основанию 1).
25
Формула изобретения
Манипулятор, содержащий основание с направляющей, каретку, установленную на этой направляющей, исполнительный орган,
Q расположенный на каретке и охваченный гибким элементом передачи с гибкой связью, шкив которой расположен на основании, отличающийся тем, что, с целью повышения надежности за счет устранения влияния динамических нагрузок на рабо5 чий орган и обеспечения его регулировочных перемещений, в передачу с гибкой связью дополнительно введены две пары роликов, установленных на каретке, и два ролика, установленных на рабочем органе, причем гибкий элемент этой передачи вы0 полнен разомкнутым и его концы закреплены на основании, а каждая ветвь гибкого элемента огибает ролики одной пары, установленные на каретке, и один ролик, установленный на рабочем органе.
J9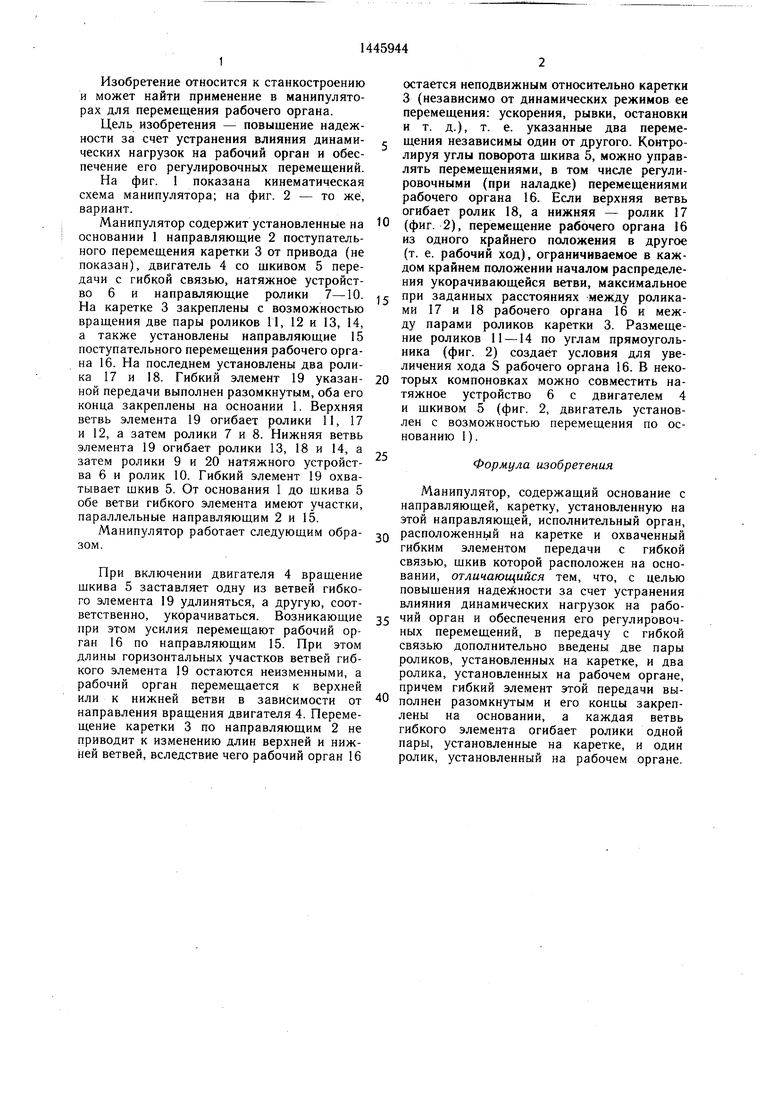
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления приводом тягового органа | 1985 |
|
SU1289760A1 |
| Устройство для вытрамбовывания котлованов | 1989 |
|
SU1733563A2 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2570541C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2559962C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560111C1 |
| Подвесной конвейер | 1990 |
|
SU1728091A1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560113C1 |
| УСТРОЙСТВО НАТЯЖЕНИЯ РЕМНЯ ПРИВОДА МЕХАНИЗМА ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ АВТОМОБИЛЯ | 2010 |
|
RU2452885C1 |
| Устройство для принудительной подачи нити с реверсивным движением нитеводителя | 1973 |
|
SU464671A1 |
| Устройство для ленточного шлифования | 1979 |
|
SU889397A1 |
Изобретение относится к станкостроению и может применяться в манипуляторах для перемещения рабочего органа. Цель изобретения - повышение надежности за счет устранения влияния динамических нагрузок на рабочий орган и обеспечение его регулировочных перемещений. При включении двигателя 4 вращение щки- ва 5 заставляет одну из ветвей гибкого элемента 19 удлиняться, а другую укорачиваться. Возникающие при этом усилия перемещают рабочий орган 16 по направляющим 15. При этом длины горизонтальных участков ветвей гибкого элемента 19 остаются неизменными, а рабочий орган перемещается к верхней или нижней ветви в зависимости от направления вращения двигателя 4. При перемещении каретки 3 по направляющим 2 рабочий орган 16 остается неподвижным относительно каретки 3 (независимо от динамических режимов ее перемещения: ускорения, рывки, остановки). 2 ил. |
Фиг. 2
| Роботрон | |||
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
