Изобретение относится к промышленному транспорту, в частности к вертикаль- ным конвейерам для межэтажной транспортировки штучных грузов с автоматической загрузкой и разгрузкой.
Целью изобретения является повышение надежности конвейера.
Для этого в подвесном конвейере, включающем ходовой путь, приводную и натяжную звездочки, огибающий их тяговый орган в виде втулочно-пальцевой цепи с каретками, имеющими-удлиненные с двух сторон оси, и грузовые подвески, каждая грузовая каретка связана с грузовой подвеской посредством установленной на одном конце удлиненной оси втулки, а с цепью - посредством втулки с фланцем, жестко связанным с пальцем цепи, причем последний размещен соосно с осью каретки,
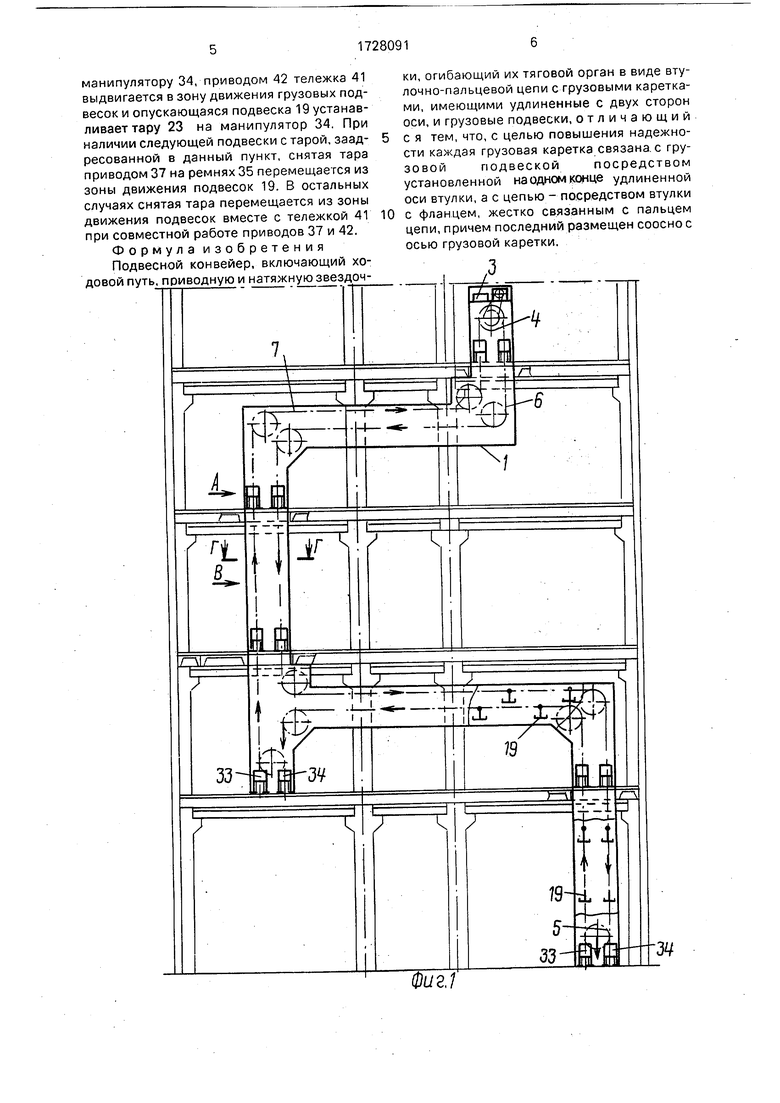
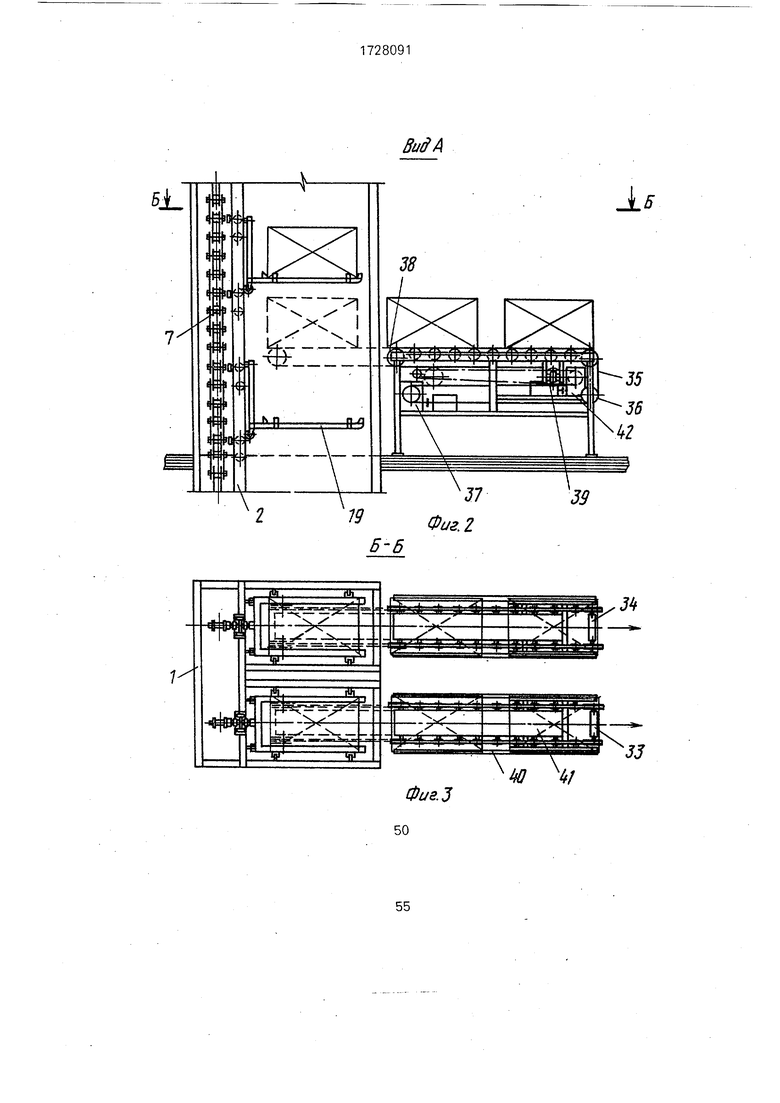
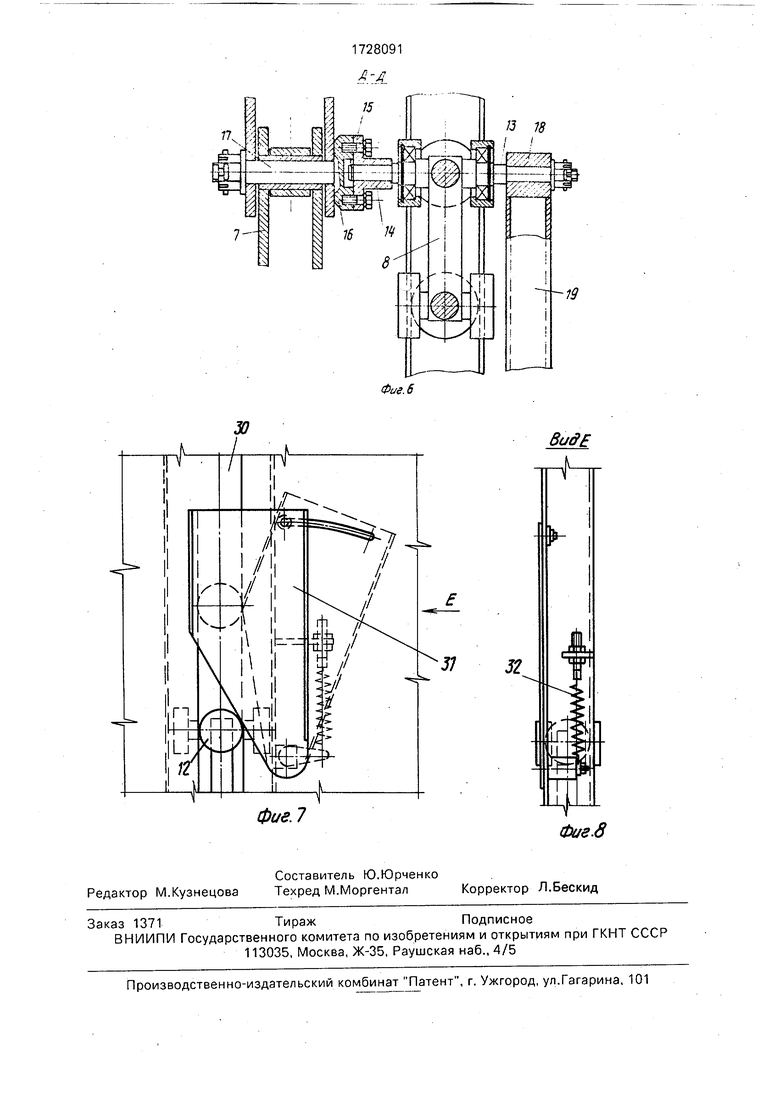
На фиг.1 изображен один из возможных вариантов трассы конвейера; на фиг.2 вид по стрелке А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - вид по стрелке В на фиг.1; на фиг.5 - разрез Г-Г на фиг.1; на фиг.6 - разрез Д-Д на фиг.5; на фиг.7 - участок трассы конвейера в месте пересечения паза ездового пути рояльными роликами подвески; на фиг.8 - вид по стрелке Е на фиг.7.
Конвейер содержит раму 1 с установленными на ней ходовым путем 2, приводом 3, приводной 4, натяжной 5 и отклоняющими 6 звездочками. На звездочки надета огибающая их втулочно-пальцевая цепь 7.
Внутри ходового пути 2 размещаются грузовые 8 и промежуточные 9 каретки с сомкнутыми осями 10 и 11 катков 12, имеющие развитые базу и колею катков 12 в двух взаимно перпендикулярных плоскостях.
Грузовая каретка 8 выполнена с одной удлиненной с двух сторон осью 13 с цилиндрическими концами; на одном из которых
шарнирно закреплена втулка 14 с фланцем 15, жестко соединяющимся с фланцем 16 специального пальца 17 тяговой цепи 7. На другом конце оси 13 шарнирно закреплена втулка 18 грузовой подвески 19.
Шарнирное соединение грузовой каретки 8 с цепью 7|и грузовой подвеской 19 обеспечивает свободный поворот грузовой подвески 19 вокруг оси 13 независимо от нагрузки на подвеску и натяжения цепи, а также передачу тягового усилия цепи 7 грузовой подвеске 19 на вертикальных, горизонтальных и поворотных (на звездочках) участкахходового пути 2 без воздействия на цепь момента, создаваемого консольной подвеской с грузом, который воспринимается ходовым путем 2 через каретку 8.
Грузовая подвеска 19 выполнена в виде рамы 20 с. консольными грузозахватными вилами 21 и рояльными роликами 22. Вилы 21 оснащены центрирующими тару 23 упорами 24 и 25 и центрирующими подвеску 19 роликами 26. взаимодействующими с направляющими 27, установленными на раме 1. В движении грузовая подвеска 19 опирается на грузовую каретку 8 и рояльными роликами 22 - на плоскую часть 28 ходового пути 2.
Промежуточные каретки 9 соединяются с тяговой цепью 7 аналогично грузовым кареткам 8 с помощью удлиненной с одной стороны оси 29.
При переходе грузовой подвески 19 с вертикального участка трассы конвейера на его горизонтальный участок и наоборот рояльные ролики 22 пересекают паз 30 ходового пути 2. Для предотвращения попадания роликов 22 в паз 30 в указанных местах установлены подпружиненные заслонки 31, перекрывающие паз 30. Рояльные ролики 22 грузовой подвески 19 переезжают паз 3.0 ходового пути 2 по поверхности заслонки 31, а при прохождении данного участка ходового пути 2 каретками 8 и 9 заслонка 31 катками 12 поворачивается, освобождая паз 30, и после прохода каретки пружиной 32 возвращается в исходное положение.
Для автоматической загрузки и разгрузки подвесок 19 пункты приема и отправки грузов на всех этажах оснащены загрузочным 33 и разгрузочным 34 манипуляторами. При этом загрузка тар на подвески осуществляется только на восходящую ветвь, а разгрузка тар с подвески -только с нисходящей ветви конвейера с использованием вертикального перемещения грузовой подвески конвейера.
Каждый манипулятор оснащен двумя гибкими транспортирующими элементами
35, например клиновыми ремнями, огибающими шкивы 36, с приводом 37. Две пары шкивов 38 и 39 смонтированы на перемещающейся в направляющих 40 тележке 41, вы- двигающейся приводом 42. При этом вилы 21 подвески 19 свободно проходят, пропуская между собой выдвигаемую часть тележки 41.
Конвейер работает следующим образом.
При включении привода 3 его тяговое усилие звездочкой 4 передается цепи 7, осуществляющей непрерывное перемещение грузовых 8 и промежуточных 9 кареток внутри ходового пути 2. При этом грузовые подвески 19, шарнирно связанные с грузовыми каретками 8, непрерывно перемещаются по вертикальным, горизонтальным и поворотным (на звездочках) участкам
замкнутой в одной вертикальной плоскости трассы конвейера. В своем движении грузовые подвески 19 опираются на плоскую часть 28 ходового пути 2. Транспортируемый груз в унифицированной таре 23 расположен на вилах 21 и в движении удерживается на вилах упорами 24 и 25.
Конструкция грузовой подвески 19 предназначена для автоматической погрузки и разгрузки тары 23 загрузочным 33 и
разгрузочным 34 манипуляторами.
Для погрузки тары на подвеску 19 кон- v вейера тара 23 устанавливается или подается цеховым транспортным средством на манипулятор 33 и приводом 37 на ремнях 35
перемещается к переднему по ходу движения его краю. При подходе свободной подвески из системы автоматического управления конвейером поступает команда манипулятору 33 и приводом 42 совместно
с приводом 37 тележка 41 с тарой выдвигается, вводя тару в зону движения грузовых подвесок19. Поднимающаяся подвеска 19 вилами т снимает тару 23 с манипулятора 33.
При наличии второй тары на манипуляторе 33 для отправки и наличии следующей свободной подвески 19 по команде системы управления тележка 41 остается выдвинутой, а вторая тара 23 приводом 37 перемещается в зону движения подвесок 19 и поднимающаяся подвеска снимает тару 23 с манипулятора 33. В остальных случаях после завершения загрузки первой тары на подвеску конвейера тележка 41 приводом
42 возвращается в исходное положение.
Разгрузка тары 23 с подвески 19 конвейера осуществляется следующим образом.
При подходе подвески 19 с тарой 23, заадресованной в данный пункт из системы
управления конвейером, поступает команда
манипулятору 34, приводом 42 тележка 41 выдвигается в зону движения грузовых подвесок и опускающаяся подвеска 19 устанавливает тару 23 на манипулятор 34. При наличии следующей подвески с тарой, заадресованной в данный пункт, снятая тара приводом 37 на ремнях 35 перемещается из зоны движения подвесок 19. В остальных случаях снятая тара перемещается из зоны движения подвесок вместе с тележкой 41 при совместной работе приводов 37 и 42. Формула изобретения Подвесной конвейер, включающий ходовой путь, приводную и натяжную звездоч0
ки, огибающий их тяговой орган в виде вту- лочно-пальцевой цепи с грузовыми каретками, имеющими удлиненные с двух сторон оси, и грузовые подвески, отличающий с я тем, что, с целью повышения надежности каждая грузовая каретка связана, с грузовой подвеской посредством установленной наодномконце удлиненной оси втулки, а с цепью - посредством втулки с фланцем, жестко связанным с пальцем цепи, причем последний размещен сооснос осью грузовой каретки.
Фиг.З
Составитель Ю.Юрченко Редактор М.Кузнецова Техред М.МоргенталКорректор Л.Бескид
Заказ 1371ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5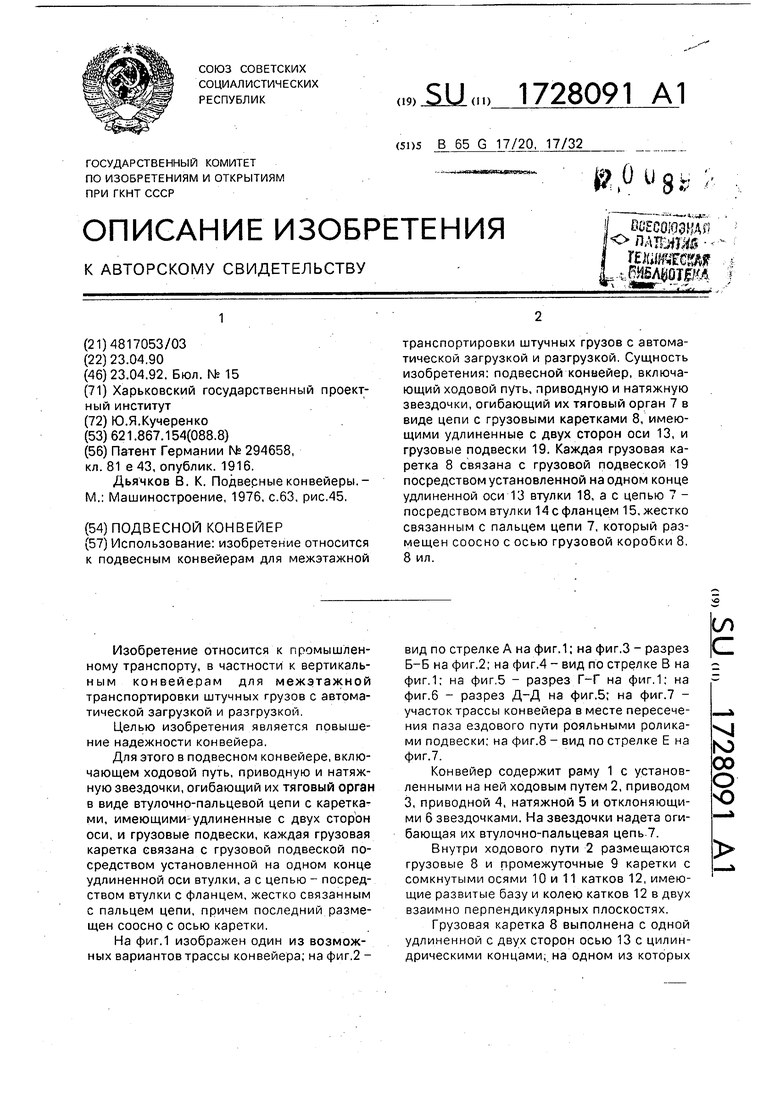

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для перегрузки подвесок с подвесного грузонесущего конвейера на рабочее место | 1975 |
|
SU612868A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕРвсгсо:ЗСНАЯ;;:::;';Е:1ш::^ .'ЕКА | 1970 |
|
SU284700A1 |
| Устройство для перегрузки подвесок с подвесного конвейера | 1978 |
|
SU770951A1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| Устройство для поворота грузовых подвесок конвейера | 1983 |
|
SU1155535A1 |
| Конвейер с пространственной трассой | 1982 |
|
SU1094812A1 |
| Тележечный конвейер | 1979 |
|
SU772936A1 |
| Подвесной толкающий конвейер | 1981 |
|
SU1058840A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
Использование: изобретение относится к подвесным конвейерам для межэтажной транспортировки штучных грузов с автоматической загрузкой и разгрузкой. Сущность изобретения: подвесной конвейер, включающий ходовой путь, приводную и натяжную звездочки, огибающий их тяговый орган 7 в виде цепи с грузовыми каретками 8, имеющими удлиненные с двух сторон оси 13, и грузовые подвески 19. Каждая грузовая каретка 8 связана с грузовой подвеской 19 посредством установленной на одном конце удлиненной оси 13 втулки 18, а с цепью 7 - посредством втулки 14 с фланцем 15, жестко связанным с пальцем цепи 7, который размещен соосно с осью грузовой коробки 8. 8 ил.
| ВВОДНАЯ РОЛИКОВАЯ КОРОБКА | 0 |
|
SU294658A1 |
| Горный компас | 0 |
|
SU81A1 |
| Цоколь для электрических ламп накаливания с предохранителем от вывинчивания | 1924 |
|
SU1916A1 |
| Дьячков В | |||
| К | |||
| Подвесные конвейеры | |||
| - М.: Машиностроение, 1976, с.63, рис.45. | |||
