Изобретение относится к способам управления приводами тягового органа, преимущественно подъемно-транспортного оборудования, и может использоваться в различных приводах, осуществляющих больщое число пусков в час в условиях изменения статического момента и момента инерции в широких пределах.
Целью изобретения является повышение эксплуатационной надежности привода и точности останова перемещаемых материалов при одновременном сокращении потребления электроэнергии.
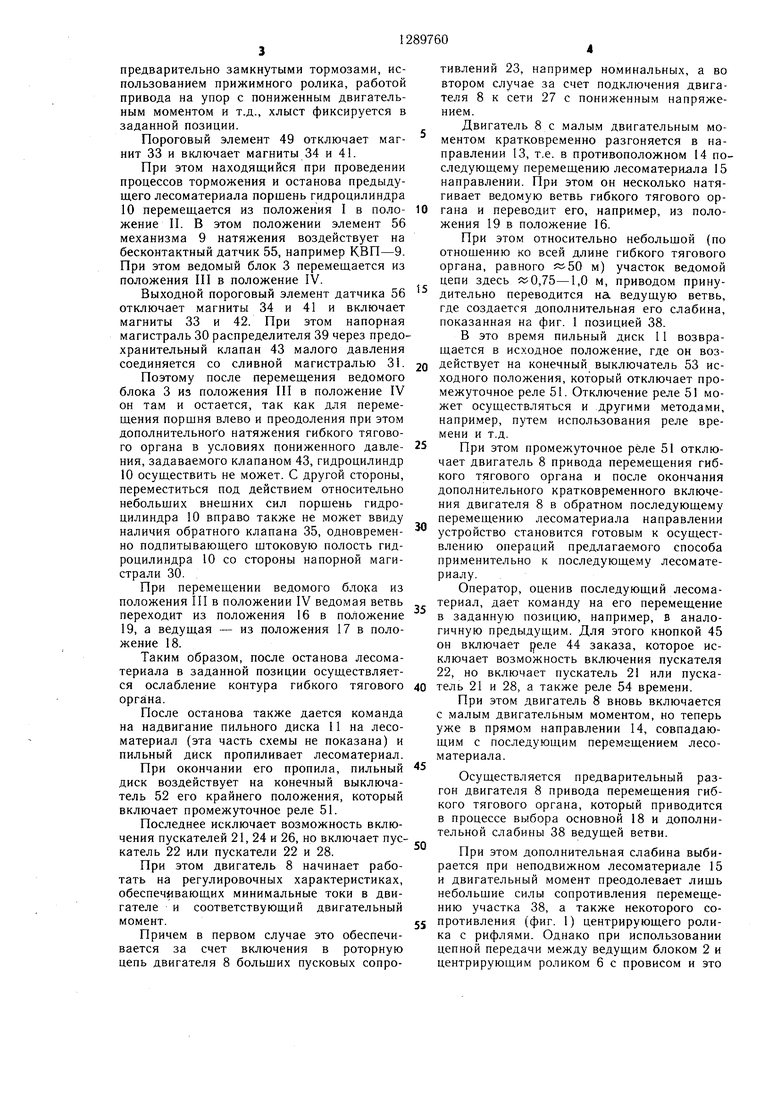
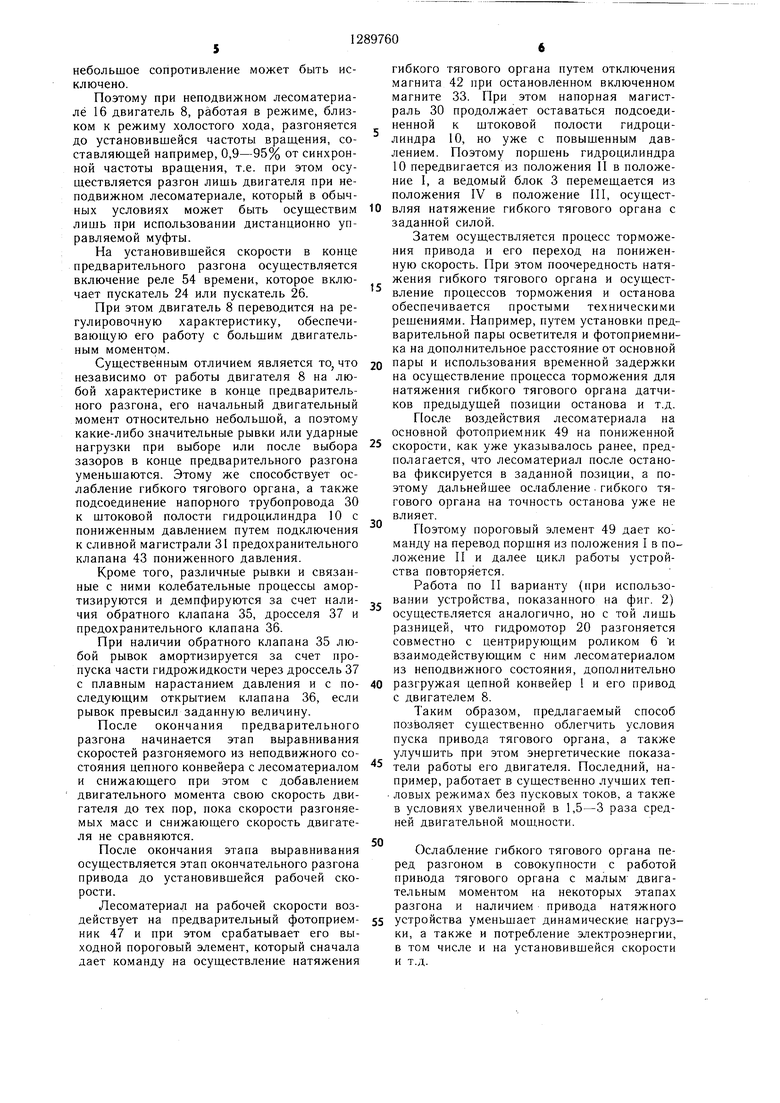
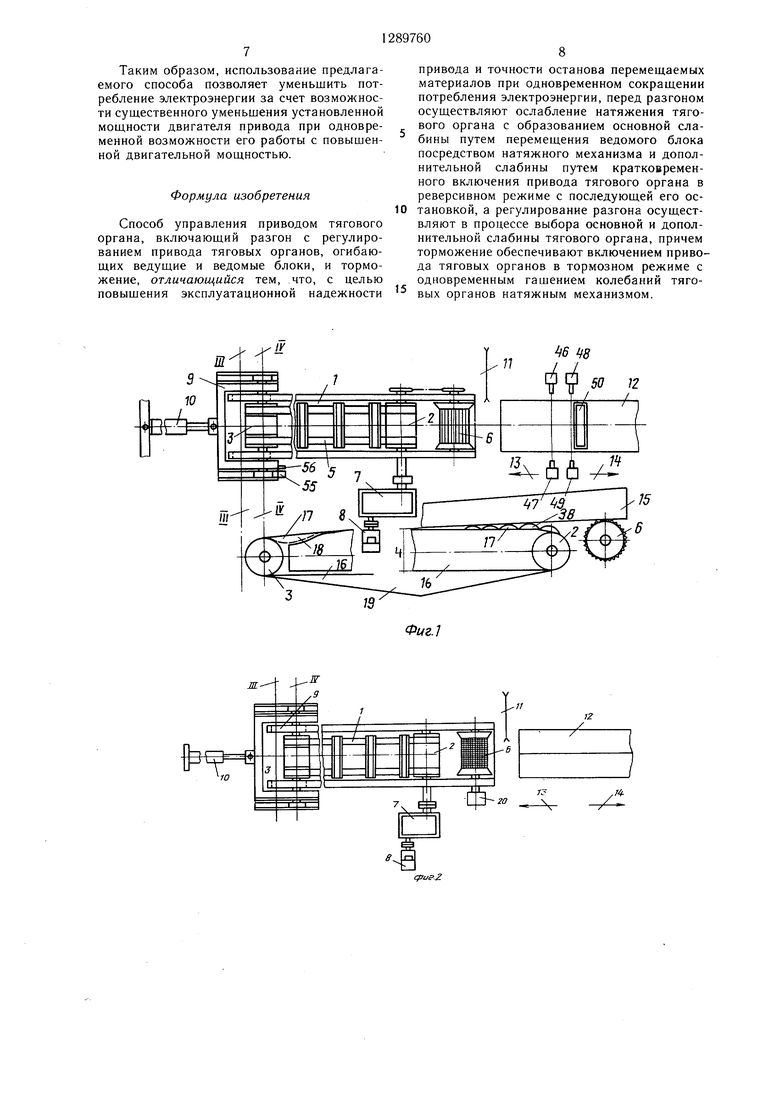
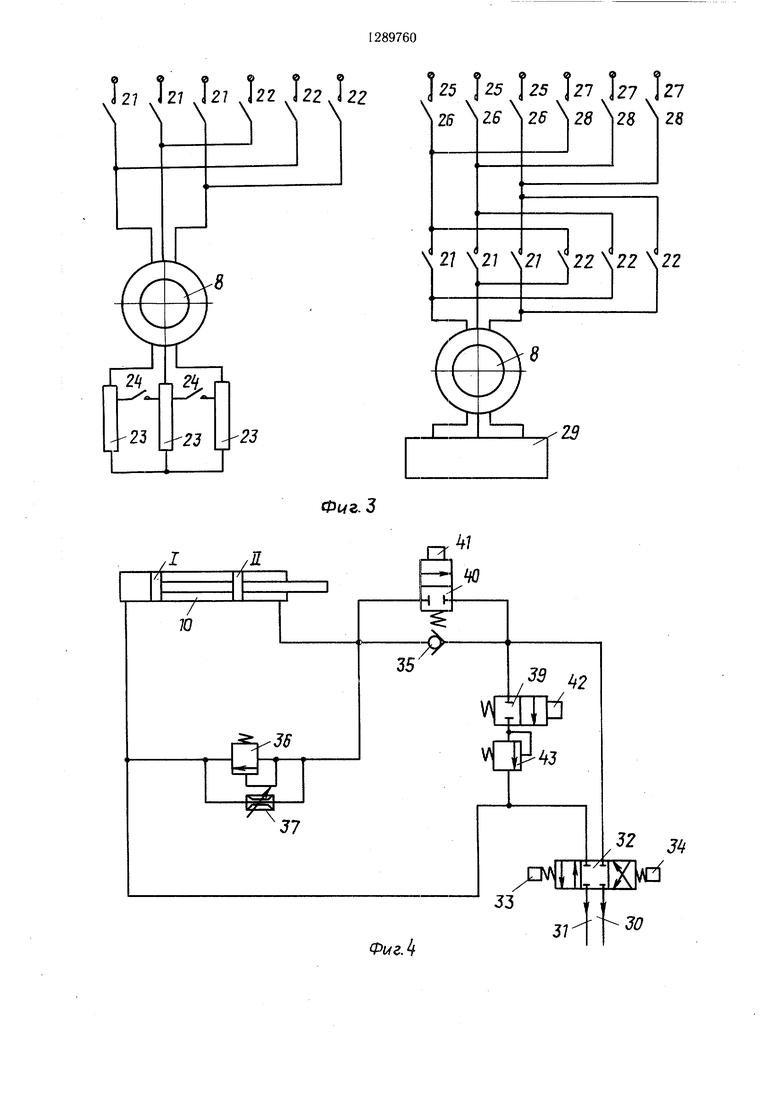
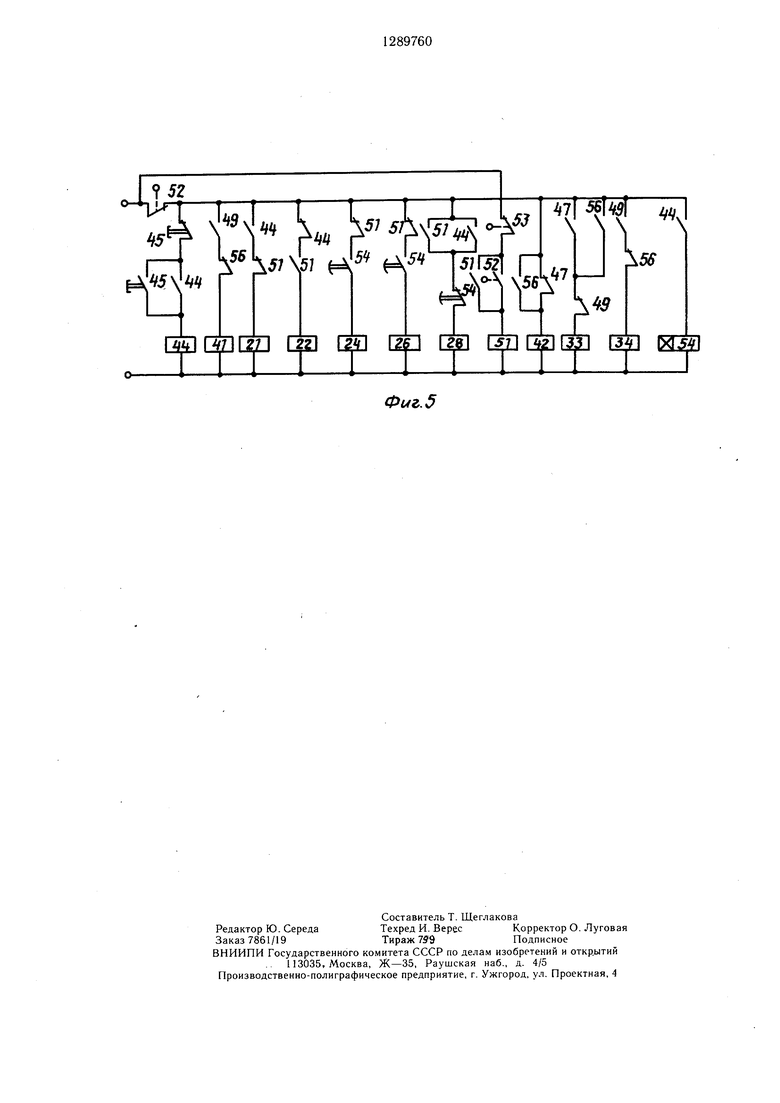
На фиг. 1 схематически показано устройство с одним электроприводом тягового органа (I вариант); на фиг. 2 - то же, с двумя приводами - электро и гидроприводами тягового органа (II вариант); на фиг. 3 - силовая электросхема управления двигателя привода тягового органа с двумя схемными вариантами его использования; на фиг. 4 - гидросхема управления работой привода натяжного механизма гибкого тягового органа; на фиг. 5 - электросхема управления работой устройства с одним электроприводом тягового органа. Устройство для реализации предлагаемого способа содержит подающий механизм с цепным конвейером 1 с ведущим блоком 2 с звездочкой и ведомым блоком 3, на которых закреплен контур 4 гибкого тягового органа 5 с траверсами.
Ведущий блок 2 со звездочкой кинематически (цепная передача) соединен с центрирующим роликом 6 (с рифлями), а также с редуктором 7 и приводным двигателем 8. При этом ведомый блок 3 закреплен на подвижной каретке 9 и составляют в целом натяжной механизм контура гибкого тягового органа, в котором под действием гидроцилиндра 10 контур может принудительно натягиваться и расслабляться.
Кроме того, устройство содержит пильный станок 11 и приемный стол 12, а также показано направление перемещения лесоматериала 13 и обратное ему направление 14. Сам лесоматериал, т.е. хлыст или остающаяся от него часть после раскряжевки, показан позицией 15.
В свою очередь позициями 16 и 17 показаны ведомая и ведущая ветви контура в натянутом состоянии, а позициями 18 и 19 эти же ветви контура в расслабленном состоянии.
Устройство для осуществления процессов управления приводами циклового оборудования для перемещения материалов (фиг. 2) содержит аналогичные механизмы, но с той лишь разницей, что центрирующая рябуха 6 кинематически не соединена с ведущей звездочкой ведущего блока 2, но выполнена приводной от дополнительного привода 20, например гидромотора. При этом в процессе разгона лесоматериала участвуют два привода.
0
5
0
5
0
S
0
5
На фиг. 3 показаны две силовые схемы управления двигателем 8 привода тягового органа. При этом в первой схеме он подключен к сети пускателями 21 и 22 «Вперед и «Назад, а в роторной цепи включены ограничивающие сопротивления 23, шунтируемые (применительно к предлагаемому способу) пускателем 24.
Е)О второй схеме двигатель 8 подключен к сети 25 промышленного напряжения 380 В пускателем 26, а к сети 27 пониженного напряжения, например, 220 В подключен пускателем 28.
При этом двигатель может содержать роторную цепь 29 с необходимым регулированием или может быть короткозамкнутым, если это позволяют последующие условия его работы на установившейся скорости и при останове, например, путем совместной работы с гидромотором 20.
На фиг.. 4 показана гидросхема устройства, на которой привод 10 натяжного механизма 9 соединен с напорной 30 и сливной 31 магистралями через распределитель 32 с магнитами 33 и 34. Кроме того, гидросхема содержит обратный клапан 35, предохранительный клапан 36 и дроссель 37, а также дополнительные распределители 39 и 40 с магнитами 41 и 42 и дополнительный предохранительный клапан 43 малого давления.
На фиг. 5 приведена электрическая схема управления устройствами, реализующая предлагаемый способ, на которой реле 44 заказа с кнопкой 45 заказа условно соответствует одной позиции останова лесоматериала. Эта позиция на фиг. 1 также условно задана предварительными 46 и 47 осветителями и фотоприемниками и основными 48 и 49 осветителями и фотоприемниками или упором 50.
В схеме на фиг. 5 также имеются промежуточное реле 51, контакты 52 и 53 конечных выключателей крайнего и исходного положения пильного диска 11 и реле 54 времени.
Кроме того, на фиг. 1 позицией 38 показан дополнительный участок слабины ведущей ветви и позицией 55 датчик конечного положения натяжного механизма, взаимодействующий с воздействующим на него элементом 56 механизма 9 натяжения.
Способ управления приводом тягового органа по I варианту осуществляется следующим образом.
После останова предыдущего лесоматериала в заданной позиции, определяемой основными 48 и 49 осветителем и фотоприемником или упором 50, применительно к фотоприемнику 49 срабатывает аналогичный выходной пороговый элемент, отключающий привод на пониженной скорости (эта часть схемы не показана).
При этом известными техническими средствами, которые не показаны, например
тивлений 23, например номинальных, а во втором случае за счет подключения двигателя 8 к сети 27 с пониженным напряжением.
Двигатель 8с малым двигательным моментом кратковременно разгоняется в направлении 13, т.е. в противоположном 14 по следующему перемещению лесоматернала 15 направлении. При этом он несколько натягивает ведомую ветвь гибкого тягового орпредварительно замкнутыми тормозами, использованием прижимного ролика, работой привода на упор с пониженным двигательным моментом и т.д., хлыст фиксируется в заданной позиции.
Пороговый элемент 49 отключает магнит 33 и включает магниты 34 и 41.
При этом находящийся при проведении процессов торможения и останова предыдущего лесоматериала порщень гидроцилиндра
10 перемещается из положения I в поло- 10 гана и переводит его, например, из положение II. В этом положении элемент 56 жения 19 в положение 16. механизма 9 натяжения воздействует на бесконтактный датчик 55, например КВП-9. При этом ведомый блок 3 перемещается из положения П1 в положение IV.
Выходной пороговый элемент датчика 56 отключает магниты 34 и 41 и включает магниты 33 и 42. При этом напорная магистраль 30 распределителя 39 через предохранительный клапан 43 малого давления соединяется со сливной магистралью 31. 20 действует на конечный выключатель 53 исПоэтому после перемещения ведомого ходного положения, который отключает про- блока 3 из положения III в положение IV он там и остается, так как для перемещения порщня влево и преодоления при этом дополнительног о натяжения гибкого тягового органа в условиях пониженного давления, задаваемого клапаном 43, гидроцилиндр 10 осуществить не может. С другой стороны, переместиться под действием относительно небольших внещних сил порщень гидроцилиндра 10 вправо также не может ввиду наличия обратного клапана 35, одновременно подпитывающего щтоковую полость гидроцилиндра 10 со стороны напорной магиПри этом относительно небольшой (по отношению ко всей длине гибкого тягового органа, равного 50 м) участок ведомой цепи здесь J0,75-1,0 м, приводом принудительно переводится на ведущую ветвь, где создается дополнительная его слабина, показанная на фиг. 1 позицией 38.
В это время пильный диск 11 возвращается в исходное положение, где он воз25
30
страли 30.
При перемещении ведомого блока из
межуточное реле 51. Отключение реле 51 может осуществляться и другими методами, например, путем использования реле времени и т.д.
При этом промежуточное реле 51 отключает двигатель 8 привода перемещения гибкого тягового органа и после окончания дополнительного кратковременного включения двигателя 8 в обратном последующему перемещению лесоматериала направлении устройство становится готовым к осуществлению операций предлагаемого способа применительно к последующему лесоматериалу.
Оператор, оценив последующий лесомаположения III в положении IV ведомая ветвь териал, дает команду на его перемещение переходит из положения 16 в положение в заданную позицию, например, в анало- 19, а ведущая - из положения 17 в поло- гичную предыдущим. Для этого кнопкой 45 жение 18.он включает реле 44 заказа, которое исТаким образом, после останова лесома- ключает возможность включения пускателя териала в заданной позиции осуществляет- 22, но включает пускатель 21 или пуска- ся ослабление контура гибкого тягового 40 тель 21 и 28, а также реле 54 времени, органа.При этом двигатель 8 вновь включается
После останова также дается команда на надвигание пильного диска 11 на лесоматериал (эта часть схемы не показана) и пильный диск пропиливает лесоматериал.
При окончании его пропила, пильный 45 диск воздействует на конечный выключатель 52 его крайнего положения, который включает промежуточное реле 51.
Последнее исключает возможность включения пускателей 21,24 к 26, но включает пускатель 22 или пускатели 22 и 28.
При этом двигатель 8 начинает рабос малым двигательным моментом, но теперь уже в прямом направлении 14, совпадающим с последующим перемещением лесоматериала.
Осуществляется предварительный разгон двигателя 8 привода перемещения гибкого тягового органа, который приводится в процессе выбора основной 18 и дополнительной слабины 38 ведущей ветви.
При этом дополнительная слабина выбирается при неподвижном лесоматериале 15 и двигательный момент преодолевает лишь небольщие силы сопротивления перемещению участка 38, а также некоторого со- 55 противления (фиг. 1) центрирующего ролика с рифлями. Однако при использовании цепной передачи между ведущим блоком 2 и центрирующим роликом 6 с провисом и это
тать на регулировочных характеристиках, обеспечивающих минимальные токи в двигателе и соответствующий двигательный момент.
Причем в первом случае это обеспечивается за счет включения в роторную цепь двигателя 8 больших пусковых сопротивлений 23, например номинальных, а во втором случае за счет подключения двигателя 8 к сети 27 с пониженным напряжением.
Двигатель 8с малым двигательным моментом кратковременно разгоняется в направлении 13, т.е. в противоположном 14 последующему перемещению лесоматернала 15 направлении. При этом он несколько натягивает ведомую ветвь гибкого тягового органа и переводит его, например, из положения 19 в положение 16.
гана и переводит его, например, из положения 19 в положение 16.
действует на конечный выключатель 53 исПри этом относительно небольшой (по отношению ко всей длине гибкого тягового органа, равного 50 м) участок ведомой цепи здесь J0,75-1,0 м, приводом принудительно переводится на ведущую ветвь, где создается дополнительная его слабина, показанная на фиг. 1 позицией 38.
В это время пильный диск 11 возвращается в исходное положение, где он возходного положения, который отключает про-
межуточное реле 51. Отключение реле 51 может осуществляться и другими методами, например, путем использования реле времени и т.д.
При этом промежуточное реле 51 отключает двигатель 8 привода перемещения гибкого тягового органа и после окончания дополнительного кратковременного включения двигателя 8 в обратном последующему перемещению лесоматериала направлении устройство становится готовым к осуществлению операций предлагаемого способа применительно к последующему лесоматериалу.
5
с малым двигательным моментом, но теперь уже в прямом направлении 14, совпадающим с последующим перемещением лесоматериала.
Осуществляется предварительный разгон двигателя 8 привода перемещения гибкого тягового органа, который приводится в процессе выбора основной 18 и дополнительной слабины 38 ведущей ветви.
При этом дополнительная слабина выбирается при неподвижном лесоматериале 15 и двигательный момент преодолевает лишь небольщие силы сопротивления перемещению участка 38, а также некоторого со- 5 противления (фиг. 1) центрирующего ролика с рифлями. Однако при использовании цепной передачи между ведущим блоком 2 и центрирующим роликом 6 с провисом и это
небольшое сопротивление может быть исключено.
Поэтому при неподвижном лесоматериале 16 двигатель 8, работая в режиме, близком к режиму холостого хода, разгоняется до установившейся частоты враш,ения, составляющей например, 0,9-95% от синхронной частоты вращения, т.е. при этом осуществляется разгон лишь двигателя при неподвижном лесоматериале, который в обычных условиях может быть осуществим лишь при использовании дистанционно управляемой муфты.
На установившейся скорости в конце предварительного разгона осуществляется включение реле 54 времени, которое включает пускатель 24 или пускатель 26.
При этом двигатель 8 переводится на регулировочную характеристику, обеспечивающую его работу с большим двигательным моментом.
Существенным отличием является то, что независимо от работы двигателя 8 на любой характеристике в конце предварительного разгона, его начальный двигательный момент относительно небольшой, а поэтому какие-либо значительные рывки или ударные нагрузки при выборе или после выбора зазоров в конце предварительного разгона уменьшаются. Этому же способствует ослабление гибкого тягового органа, а также подсоединение напорного трубопровода 30 к штоковой полости гидроцилиндра 10 с пониженным давлением путем подключения к сливной магистрали 31 предохранительного клапана 43 пониженного давления.
Кроме того, различные рывки и связанные с ними колебательные процессы амортизируются и демпфируются за счет наличия обратного клапана 35, дросселя 37 и предохранительного клапана 36.
При наличии обратного клапана 35 любой рывок амортизируется за счет пропуска части гидрожидкости через дроссель 37 с плавным нарастанием давления и с по- следующим открытием клапана 36, если рывок превысил заданную величину.
После окончания предварительного разгона начинается этап выравнивания скоростей разгоняемого из неподвижного состояния цепного конвейера с лесоматериалом и снижающего при этом с добавлением двигательного момента свою скорость двигателя до тех пор, пока скорости разгоняемых масс и снижающего скорость двигателя не сравняются.
После окончания этапа выравнивания осуществляется этап окончательного разгона привода до установивщейся рабочей скорости.
Лесоматериал на рабочей скорости воздействует на предварительный фотоприем- ник 47 и при этом срабатывает его выходной пороговый элемент, который сначала дает команду на осуществление натяжения
5
5
0
0
5
0
5
5
0
гибкого тягового органа путем отключения магнита 42 при остановленном включенном магните 33. При этом напорная магистраль 30 продолжает оставаться подсоединенной к штоковой полости гидроцилиндра 10, но уже с повышенным давлением. Поэтому поршень гидроцилиндра 10 передвигается из положения II в положение I, а ведомый блок 3 перемещается из положения IV в положение III, осуществляя натяжение гибкого тягового органа с заданной силой.
Затем осуществляется процесс торможения привода и его переход на пониженную скорость. При этом поочередность натяжения гибкого тягового органа и осуществление процессов торможения и останова обеспечивается простыми техническими решениями. Например, путем установки предварительной пары осветителя и фотоприемника на дополнительное расстояние от основной пары и использования временной задержки на осуществление процесса торможения для натяжения гибкого тягового органа датчиков предыдущей позиции останова и т.д.
После воздействия лесоматериала на основной фотоприемник 49 на пониженной скорости, как уже указывалось ранее, предполагается, что лесоматериал после останова фиксируется в заданной позиции, а поэтому дальнейшее ослабление . гибкого тягового органа на точность останова уже не влияет.
Поэтому пороговый элемент 49 дает команду на перевод поршня из положения I в положение П и далее цикл работы устройства повторяется.
Работа по II варианту (при использовании устройства, показанного на фиг. 2) осуществляется аналогично, но с той лишь разницей, что гидромотор 20 разгоняется совместно с центрирующим роликом 6 и взаимодействующим с ним лесоматериалом из неподвижного состояния, дополнительно разгружая цепной конвейер 1 и его привод с двигателем 8.
Таким образом, предлагаемый способ позволяет существенно облегчить условия пуска привода тягового органа, а также улучшить при этом энергетические показатели работы его двигателя. Последний, например, работает в существенно лучших теп- ловых режимах без пусковых токов, а также в условиях увеличенной в 1,5-3 раза средней двигательной мош,ности.
Ослабление гибкого тягового органа перед разгоном в совокупности с работой привода тягового органа с малым двигательным моментом на некоторых этапах разгона и наличием привода натяжного устройства уменьшает динамические нагрузки, а также и потребление электроэнергии, в том числе и на установившейся скорости и т.д.
7
Таким образом, использование предлагаемого способа позволяет уменьшить потребление электроэнергии за счет возможности существенного уменьшения установленной мощности двигателя привода при одновременной возможности его работы с повышенной двигательной мощностью.
Формула изобретения
Способ управления приводом тягового органа, включающий разгон с регулированием привода тяговых органов, огибающих ведущие и ведомые блоки, и торможение, отличающийся тем, что, с целью повышения эксплуатационной надежности
8
привода и точности останова перемещаемых материалов при одновременном сокращении потребления электроэнергии, перед разгоном осуществляют ослабление натяжения тягового органа с образованием основной слабины путем перемещения ведомого блока посредством натяжного механизма и дополнительной слабины путем кратковременного включения привода тягового органа в реверсивном режиме с последующей его ос- тановкой, а регулирование разгона осуществляют в процессе выбора основной и дополнительной слабины тягового органа, причем торможение обеспечивают включением привода тяговых органов в тормозном режиме с одновременным гашением колебаний тяговых органов натяжным механизмом.
Изобретение относится к области управления приводами тягового органа (ТО) преимущественно подъемно-транспортного оборудования и позволяет повысить эксплуатационную надежность привода и точность останова перемещаемых материалов при одновременном сокращении потребления электроэнергии. Перед разгоном привода ТО, огибающего ведущие и ведомые блоки, осуществляют ослабление контура гибкого ТО с образованием основной слабины. Ее образуют путем перемещения ведомого блока посредством натяжного механизма. При этом ослабляются и ведомая и ведущая ветви ТО. Затем кратковременно включают привод ТО с малым двигательным моментом в реверсивном направлении с последующей его остановкой. При этом привод несколько натягивает ведомую ветвь ТО и относительно небольщой участок ведомой цепи приводом принудительно переводится на ведущую ветвь, где создается дополнительная слабина. После этого осуществляют разгон с регулированием привода ТО до установив- щейся рабочей скорости. Регулирование разгона осуществляют в процессе выбора основной и дополнительной слабины. Включением привода ТО в тормозном режиме обеспечивают торможение ТО. В процессе торможения гасят колебания ТО натяжным механизмом. 5 ил. (Л ю сх со О5
1Z
J99999
21 J21 JZI J22 J22 J22J 125 25 |27 h Z7
2S 28 28
v V- V-- -„л.А.оо
. 3
гт
A/
Jil4
L
r- 15 T -TTfrW Г ГГ I
d,
й.П5Гг г
AO- Чя
1
T -TTfrW Гй.П5Гг г
AO- Чя
Фиг,. 5
| Воевода Д | |||
| К | |||
| и др | |||
| Пособие для оператора полуавтоматических линий | |||
| М.: ЛП, 1979, с | |||
| Катодное реле | 1918 |
|
SU159A1 |
| Способ управления приводами циклового оборудования | 1984 |
|
SU1209536A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
