19
20
4 Oi
со ел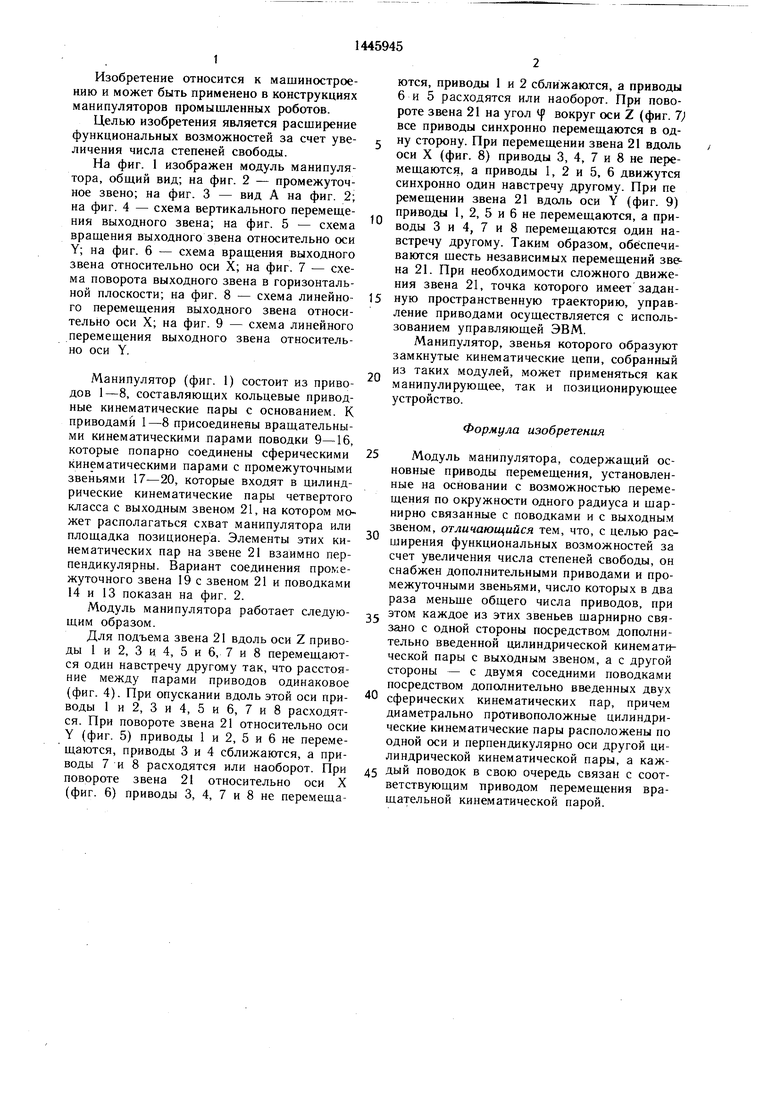
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОРУКИЙ РОБОТ-МАНИПУЛЯТОР | 2023 |
|
RU2804700C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
| Устройство для фасонной резки профильного проката | 1991 |
|
SU1811454A3 |
| Шарнир манипулятора | 1984 |
|
SU1180260A1 |
| Манипулятор агрегатного типа | 1985 |
|
SU1293014A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521935C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1989 |
|
RU2029180C1 |
| Привод манипулятора | 1982 |
|
SU1114544A2 |

Изобретение относится к машиностроению и может быть применено в конструкциях манипуляторов промышленных роботов. Целью изобретения является расширение функциональных возможностей за счет увеличения числа степеней свободы. При перемещении приводов 1 и 2; 3 и 4; 5 и 6; 7 и 8 навстречу друг другу происходит подъем выходного звена 21 и наоборот. Для поворота звена 21 с горизонтальной плоскости все приводы синхронно перемещаются. При сближении приводов 1 и 2 и расхождении приводов 6 и 5 происходит вращение звена 21 относительно горизонтальной плоскости. При синхронном перемещении приводов 1 и 2 и 5 и 6, либо 4иЗи7и8в одну сторону происходит поступательное перемещение выходного звена 21 в горизонтальной плоскости. 9 ил.
Фаз. i
Изобретение относится к машиностроению и может быть применено в конструкциях манипуляторов промышленных роботов.
Целью изобретения является расширение функциональных возможностей за счет увеличения числа степеней свободы.
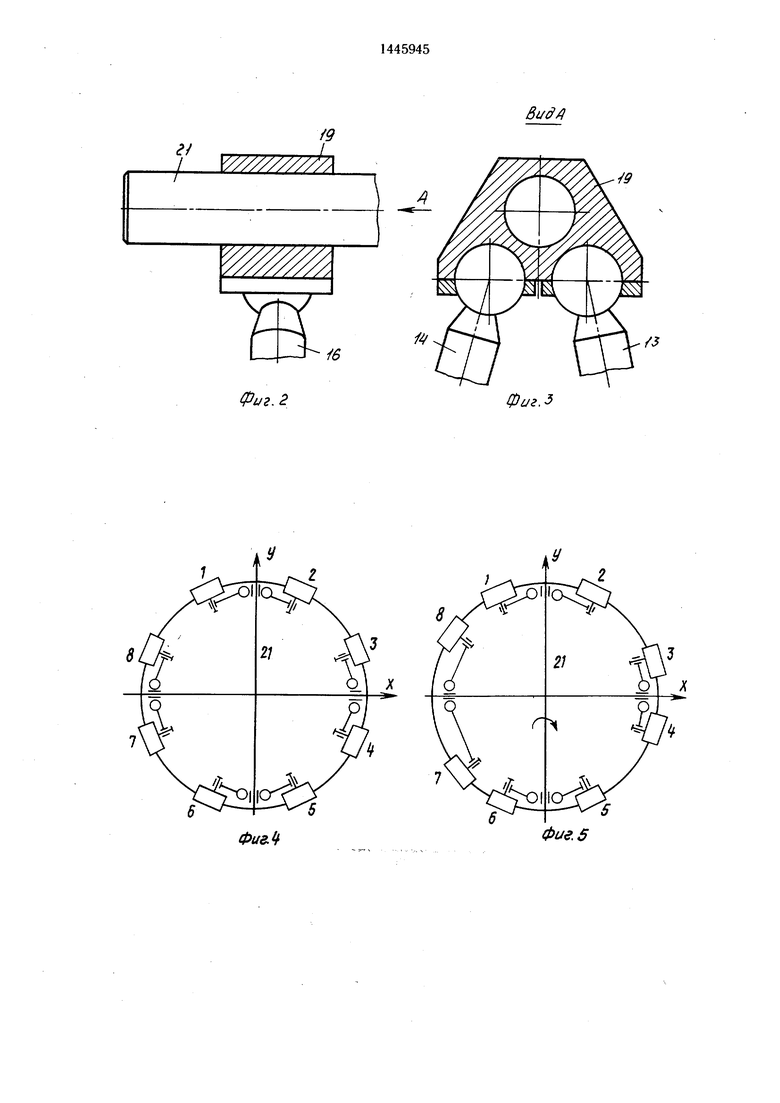
На фиг. 1 изображен модуль манипулятора, общий вид; на фиг. 2 - промежуточное звено; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - схема вертикального перемещения выходного звена; на фиг. 5 - схема вращения выходного звена относительно оси Y; на фиг. 6 - схема вращения выходного звена относительно оси X; на фиг. 7 - схема поворота выходного звена в горизонтальной плоскости; на фиг. 8 - схема линейного перемещения выходного звена относительно оси X; на фиг. 9 - схема линейного перемещения выходного звена относительно оси Y.
Манипулятор (фиг. 1) состоит из приводов 1-8, составляющих кольцевые приводные кинематические пары с основанием. К приводами 1-8 присоединены вращательными кинематическими парами поводки 9-16, которые попарно соединены сферическими кинематическими парами с промежуточными звеньями 17-20, которые входят в цилиндрические кинематические пары четвертого класса с выходным звеном 21, на котором может располагаться схват манипулятора или площадка позиционера. Элементы этих кинематических пар на звене 21 взаимно перпендикулярны. Вариант соединения промежуточного звена 19 с звеном 21 и поводками 14 и 13 показан на фиг. 2.
Модуль манипулятора работает следующим образом.
Для подъема звена 21 вдоль оси Z приводы 1 и 2, 3 и 4, 5 и 6, 7 и 8 перемещаются один навстречу другому так, что расстояние между парами приводов одинаковое (фиг. 4). При опускании вдоль этой оси приводы 1 и 2, 3 и 4, 5 и 6, 7 и 8 расходятся. При повороте звена 21 относительно оси Y (фиг. 5) приводы 1 и 2, 5 и 6 не перемещаются, приводы 3 и 4 сближаются, а приводы 7 и 8 расходятся или наоборот. При повороте звена 21 относительно оси X (фиг. 6) приводы 3, 4, 7 и 8 не перемеща0
5
0
ются, приводы 1 и 2 сближаю1тся, а приводы 6 и 5 расходятся или наоборот. При повороте звена 21 на угол f вокруг оси Z (фиг. 7) все приводы синхронно перемещаются в одну сторону. При перемещении звена 21 вдоль оси X (фиг. 8) приводы 3, 4, 7 и 8 не перемещаются, а приводы 1, 2 и 5, 6 движутся синхронно один навстречу другому. При пе ремещении звена 21 вдоль оси Y (фиг. 9) приводы 1, 2, 5 и б не перемещаются, а приводы 3 и 4, 7 и 8 перемещаются один навстречу другому. Таким образом, обеспечиваются щесть независимых перемещений звена 21. При необходимости сложного движения звена 21, точка которого имеет заданную пространственную траекторию, управление приводами осуществляется с использованием управляющей ЭВМ.
Манипулятор, звенья которого образуют замкнутые кинематические цепи, собранный из таких модулей, может применяться как манипулирующее, так и позиционирующее устройство.
Формула изобретения
Модуль манипулятора, содержащий основные приводы перемещения, установленные на основании с возможностью перемещения по окружности одного радиуса и щар- нирно связанные с поводками и с выходны.м звеном, отличающийся тем, что, с целью расширения функциональных возможностей за счет увеличения числа степеней свободы, он снабжен дополнительными приводами и промежуточными звеньями, число которых в два раза меньше общего числа приводов, при
этом каждое из этих звеньев шарнирно связано с одной стороны посредством дополнительно введенной цилиндрической кинематической пары с выходным звеном, а с другой стороны - с двумя соседними поводками посредством дополнительно введенных двух
сферических кинематических пар, причем диаметрально противоположные цилиндрические кинематические пары расположены по одной оси и перпендикулярно оси другой цилиндрической кинематической пары, а каждый поводок в СБОЮ очередь связан с соответствующим приводом перемещения вращательной кинематической парой.
/
/
f9
7///////// /Л
Iii6
Фиг. 2
(J
Фиг.
/
/
Фиг. 5
Фие.б
Фие.9
| Манипулятор | 1982 |
|
SU1049244A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
