Изобретение относится к машиностроению, в частности к приводным рычажным механизмам роботов-манипуляторов для автоматических линий и многооперационных технологических процессов с разными групповыми рабочими органами.
Известен пространственный робот-манипулятор в виде платформы Стюарта, содержащий шарнирно-рычажных механизм перемещения подвижной платформы с одним рабочим органом, которая кинематически связана с основанием через 6 сложных сферических шарниров и требует привода сразу от 6 двигателей (книга Вульфсон И.И. и др. «Механика машин» - Москва: Высшая школа, 1996, с. 28, рис. 1.20) - аналог.
Недостатками известного робота-манипулятора являются сложность конструкции, большие пространственные габариты и вес, возможность привода только одного рабочего органа одновременно от 6 двигателей.
Наиболее близким к предлагаемому изобретению является робот-манипулятор, содержащий опорное основание и приводное преобразующее устройство в виде замкнутый кинематической цепи, содержащей 12 сложных сферических шарниров для привода от 6 двигателей выходного звена с одним рабочим органом (учебное пособие Смелягин А.И. «Структура механизмов, машин и конструкций» - Москва: изд-во ИНФА-М, 2019, с. 152, схема на рис. 2.74).
Недостатками указанного механизма привода робота-манипулятора является сложность конструкции, большие пространственные габариты и вес, сложная система управления одновременно 6 приводными двигателями и низкая эксплуатационная эффективность привода от них только одного рабочего органа.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции; снижении габаритов и обеспечении ее компактности по оси «x» и по оси «у»; повышении эксплуатационной эффективности и упрощении системы управления за счет привода от одного двигателя одновременно нескольких разных рабочих органов с обеспечением их движения по разным прямолинейным и криволинейным траекториям.
Получение технического результата достигается за счет того, что установленное на опорном основании преобразующее устройство выполнено в виде собираемых между собой в замкнутую многоконтурную кинематическую цепь по горизонтали вдоль оси «ж» и по вертикали вдоль оси «у» подвижных шарнирных четырехзвенников, соединенных между собой двойные цилиндрические шарниры с параллельными осями вращения.
Сущность изобретения поясняется чертежами на фиг. 1 и фиг. 2.
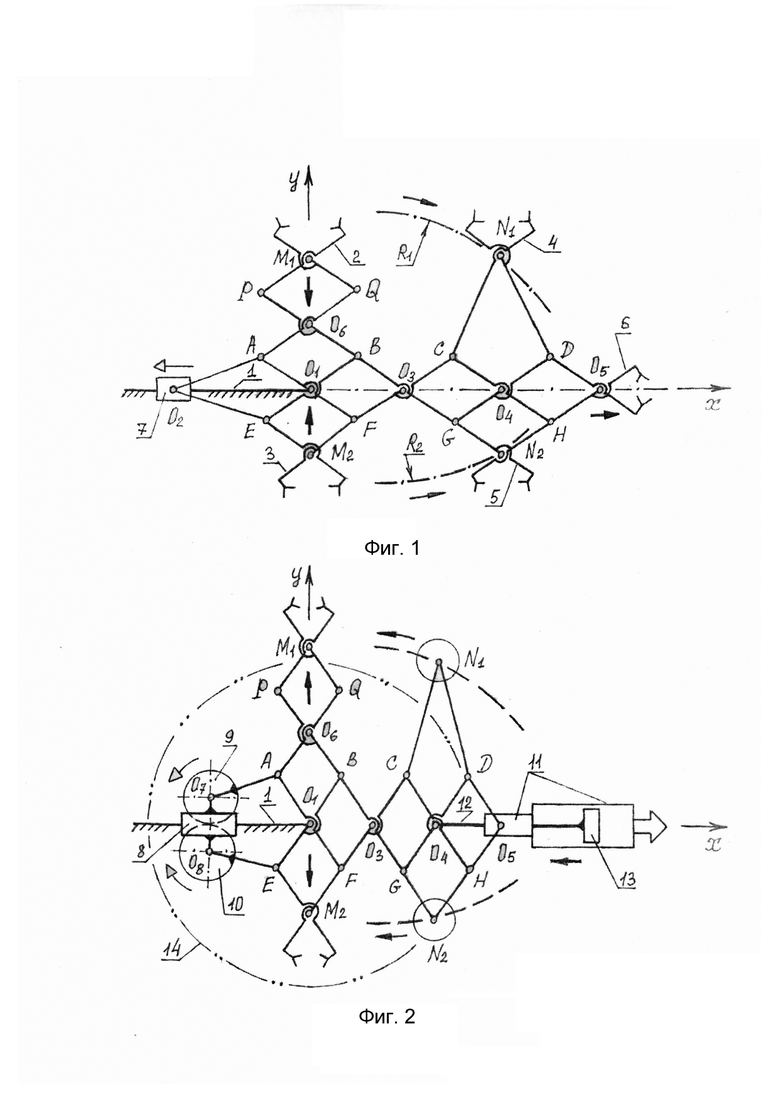
На фиг. 1 изображен общий вид складывающегося многорукого робота-манипулятора, содержащего опорное основание в виде стойки 1 и установленное на нем приводное преобразующее устройство для преобразования движения входного звена в движении разных рабочих органов 2, 3, 4, 5 и 6, например, в виде схватов. Преобразующее устройство выполнено в виде собираемых между собой в замкнутую многоконтурную кинематическую цепь по горизонтали вдоль оси «x» и по вертикали вдоль оси «y» подвижных шарнирных четырехзвенников O1O2AE, O1O3BF, O3O4CG и O4O5DH (сборка по горизонтали); O1AO6B, O6PM1Q, O1EM2F, O4CN1D и O4GN2H (сборка по вертикали), соединенных между собой через двойные цилиндрические шарниры с параллельными осями вращения А, В, С, D, Е, F, G, Н, O1, O2. Смежные стороны вышеуказанных шарнирных четырехзвенников расположены симметрично относительно оси Х (для четырехзвенников, собираемых по горизонтали вдоль оси Х) и/или расположены симметрично относительно оси Y (для четырехзвенников, собираемых по вертикали вдоль оси Y).
Привод преобразующего устройства выполнен в виде установленного на стойке 1 приводного ползуна 7, шарнирно соединенного через двойной цилиндрический шарнир O2 с двумя смежными звеньями O2A и O2E, симметрично расположенными относительно стойки 1.
Рабочий орган 2 перемещается точно по прямой оси Yс одной стороны к оси O1.
Рабочий орган 3 перемещается точно по прямой оси Y,но с другой стороны к оси O1.
Рабочий орган 4 перемещается по кривой траектории с радиусом кривизны R1.
Рабочий орган 5 перемещается по кривой траектории с радиусом кривизны R2.
Рабочий орган 6 перемещается точно по прямой оси Х и удаляется от оси O1.
На фиг. 2 представлен вариант выполнения складывающегося многорукого робота-манипулятора, в котором привод преобразующего устройства выполнен в виде установленного на стойке 1 ползуна 8 с шарнирно закрепленными на нем через шарниры O7 и O8 и установленными симметрично стойке 1 двумя зацепляющимися между собой приводными зубчатыми колесами 9 и 10 с одинаковым числом зубьев, которые сблокированы с двумя симметрично расположенными относительно стойки 1 звеньями AO7 и EO8 шарнирного четырехзвенника O8EO1AO7.
Рабочий орган 11 выполнен в виде ползуна, подвижно установленного на кулисе 12, расположенной на горизонтальной диагонали шарнирного четырехзвенника O4DO5H, и дополнен рабочим гидроцилиндром, поршень 13 которого сблокирован с кулисой 12. Стойка 1 установлена на поворотную платформу 14, выполненную с возможностью шагового углового поворота от отдельного вращательного двигателя.
Работа представленного складывающегося многорукого робота-манипулятора заключается в следующем.
Перемещение приводного ползуна 7 (или поворот приводных зубчатых колес 9 и 10) в одну сторону приводит к показанному на фиг. 1 растяжению всех шарнирных четырехзвенников вдоль оси Х и их сжатию вдоль оси Y (т.е. к уменьшению габаритов преобразующего устройства вдоль оси Y). Соответственно перемещение приводного ползуна 7 (или поворот приводных зубчатых колес 9 и 10) наоборот в другую сторону приводит, к показанному на фиг. 2, сжатию всех шарнирных четырехзвенников вдоль оси Х и их растяжению вдоль оси Y (т.е. к уменьшению габаритов преобразующего устройства и его складыванию по оси Х).
Работоспособность и представленные на фиг. 1 и фиг. 2 траектории движения всех рабочих органов 2, 3, 4, 5, 6 и 11 подтверждены экспериментально на действующем макете предлагаемого складывающегося многорукого робота-манипулятора.
В результате показанных на фиг. 1 и фиг. 2 геометрических преобразований сжатия и растяжения всех шарнирных четырехзвенников с приводом всего от одного двигателя происходит следующее различное перемещение всех 5 рабочих органов (установленное экспериментально на действующем макете):
1) рабочий орган 2 перемещается точно по прямой оси Y в одну сторону от оси O1 (проходящей через шарнир O1 стойки 1); т.е. приближается к оси O1;
2) рабочий орган 3 перемещается точно по прямой оси Y и движется навстречу рабочему органу 2 (но с другой стороны от оси O1);
3) рабочие органы 4 и 5 перемещаются по разным кривым с различными между собой радиусами кривизы R1 и R2;
4) рабочий орган 6 (фиг. 1) перемещается точно по прямой оси Х, проходящей через шарнир O1 стойки 1 (т.е. удаляется от оси O2);
5) рабочий орган 11 (фиг. 2) перемещается точно по прямой оси Х и приближается к оси O1.
Установка опорного основания в виде стойки 1 на поворотную платформу 14 расширяет рабочую зону перемещений всех рабочих органов данного робота-манипулятора.
Достигаемый в предлагаемом складывающемся многоруком роботе-манипуляторе положительный технический эффект заключается в следующем:
1. Упрощение конструкции преобразующего устройства в сочетании с возможностью его складывания и раскладывания без разборки замкнутой кинематической цепи (достигается за счет ее выполнения с установленными на горизонтали и вертикали шарнирными четырехзвенниками с цилиндрическими шарнирами, имеющими параллельные оси вращения).
2. Повышение эксплуатационной эффективности и упрощение системы управления за счет привода от одного двигателя одновременно нескольких рабочих органов с обеспечением их движения по разным прямолинейным и криволинейным траекториям.
3. Компактность робота-манипулятора в нерабочем положении, избирательно достигаемая по оси Х (фиг. 2) или по оси Y (фиг. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| ПАУТИННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2024 |
|
RU2830218C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МАНИПУЛЯТОР-ТРИПОД | 2023 |
|
RU2824543C1 |
Изобретение относится к машиностроению, в частности к приводным рычажным механизмам роботов-манипуляторов для автоматических линий и многооперационных технологических процессов с разными рабочими органами. Складывающийся многорукий робот-манипулятор содержит опорное основание и установленное на нем преобразующее устройством, которое выполнено в виде собираемых между собой в замкнутую многоконтурную кинематическую цепь по горизонтали вдоль оси X и по вертикали вдоль оси Y подвижных шарнирных четырехзвенников, соединенных между собой через двойные цилиндрические шарниры с параллельными осями вращения. Обеспечивается упрощение конструкции устройства и его компактность, расширение эксплуатационных характеристик и упрощение управления. 5 з.п. ф-лы, 2 ил.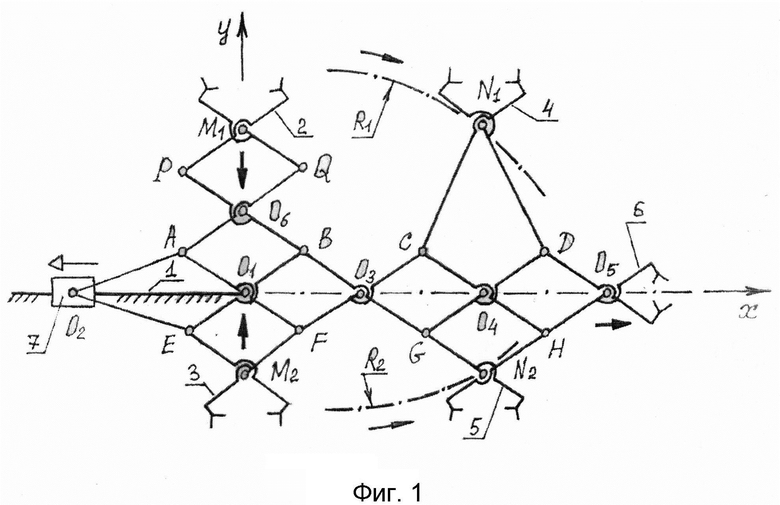
1. Складывающийся многорукий робот-манипулятор, содержащий опорное основание в виде стойки и установленное на нем приводное преобразующее устройство для преобразования движения входного звена в движение разных рабочих органов, например, в виде схватов, отличающийся тем, что преобразующее устройство выполнено в виде собираемых между собой в замкнутую многоконтурную кинематическую цепь по горизонтали вдоль оси X и по вертикали вдоль оси Y подвижных шарнирных четырехзвенников, соединенных между собой через двойные цилиндрические шарниры с параллельными осями вращения.
2. Складывающийся многорукий робот-манипулятор по п. 1, отличающийся тем, что смежные стороны шарнирных четырехзвенников расположены симметрично относительно оси X и/или оси Y.
3. Складывающийся многорукий робот-манипулятор по п. 1, отличающийся тем, что привод преобразующего устройства выполнен в виде установленного на стойке приводного ползуна, шарнирно соединенного через двойной цилиндрический шарнир с двумя смежными звеньями шарнирного четырехзвенника, симметрично расположенными относительно стойки.
4. Складывающийся многорукий робот-манипулятор по п. 1, отличающийся тем, что привод преобразующего устройства выполнен в виде установленного на стойке ползуна с шарнирно закрепленными на нем симметрично стойке двумя зацепляющимися между собой приводными зубчатыми колесами с одинаковым числом зубьев, которые сблокированы с двумя симметрично расположенными относительно стойки звеньями шарнирного четырехзвенника.
5. Складывающийся многорукий робот-манипулятор по п. 1, отличающийся тем, что один из рабочих органов выполнен в виде ползуна, установленного на кулисе, расположенной по горизонтальной диагонали шарнирного четырехзвенника, и дополнен рабочим гидроцилиндром, поршень которого сблокирован с упомянутой кулисой.
6. Складывающийся многорукий робот-манипулятор по п. 1, отличающийся тем, что стойка установлена на поворотную платформу, выполненную с возможностью шагового углового поворота от отдельного вращательного двигателя.
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОЛЕС ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2153946C2 |
| CN 201077079 Y, 25.06.2008. | |||
