Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании работы машин, станков, прессов и устройств различного назначения. Такие манипуляционные механизмы, имитирующие определенные движения рук человека, обеспечивают захват изделия - объекта манипулирования, его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10. рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами -автоматами в линиях высокой производительности.
Известен также комбинированный механизм со сложным движением выходных звеньев, содержащий передаточный механизм с выходным звеном, исполнительный механизм с выходными звеньями и губками для захвата изделий и привод, в котором передаточный механизм выполнен в виде кулачково-рычажного зубчатого многозвенника (патент РФ №2312763 (РФ), опубл. в БИ, 2007. - №35 - прототип).
Основным недостатком прототипа являются повышенные энергозатраты на процесс передачи изделий из позиции «схват изделия» в позицию «выдача изделия» и малая частота повторения рабочих циклов, т.е. невысокая производительность. Недостаток является результатом того, что комбинированный механизм содержит большое число подвижных звеньев (движушихся масс) и кинематических пар, что увеличивает расход мощности на осуществление процесса и ограничивает скорости движения звеньев.
Задачей настоящего изобретения является снижение энергозатрат на процесс передачи изделий, повышение производительности и точности работы манипулятора.
Решение поставленной задачи достигается тем, что в манипуляторе для передачи изделий, содержащем передаточный механизм с ведущим и выходным звеньями, исполнительный механизм с губками для захвата изделий и привод, ведущее звено передаточного механизма выполнено в виде кулачка, совершающего возвратно-поступательное движение, выходное звено связано с ведущим посредством промежуточного звена, последнее совершает поступательное движение в плоскости, перпендикулярной плоскости движения кулачка.
На одном конце промежуточного звена смонтирован ролик для взаимодействия с рабочим профилем ведущего кулачка, другой конец промежуточного звена шарнирно связан с выходным звеном.
На промежуточном звене перпендикулярно его продольной оси закреплены, по меньшей мере, два стержня, сопряженные с прямолинейными неподвижными направляющими.
Выполнение кинематической связи ведущего и выходного звеньев передаточного механизма посредством промежуточного звена, совершающего поступательные движения в плоскости, перпендикулярной плоскости движения ведущего кулачка, имеет свои преимущества При рабочем и холостом ходах, т.е. при движении, промежуточное и выходное звенья передаточного механизма образуют собой «жесткую» систему в виде единого звена, в котором отсутствуют линейные и угловые движения звеньев относительно друг друга. Это способствует точности движения и снижению энергозатрат на процесс передачи изделий.
В предлагаемом манипуляторе промежуточное звено передаточного механизма связано с ведущим звеном посредством ролика, сопрягаемого с рабочим профилем, выполненным в виде фигурного паза в теле кулачка. Этим исключается необходимость применения силового упругого элемента - пружины при выполнении холостых ходов.
Стержни, закрепленные на промежуточном звене перпендикулярно продольной оси последнего и сопряженные с неподвижными прямолинейными направляющими, исключают возможность поворотного движения промежуточного звена. Число стержней должно быть не меньше двух.
Заявленный манипулятор отличается от прототипа конструктивными элементами, связью между элементами, формой выполнения взаимного расположения элементов. Эти отличия способствуют повышению точности работы и производительности, снижению энергозатрат на процесс передачи изделий.
Предлагаемый манипулятор поясняется фиг.1, где представлена кинематическая схема манипулятора.
Манипулятор для передачи изделий содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для захвата изделий и привод 4.
Передаточный механизм 1 выполнен в виде кулачково-рычажного механизма, ведущее звено-кулачок 5 которого связано с выходным звеном 6 привода 4, совершающим возвратно-поступательные движения, и сопряжено посредством ролика 7 с промежуточным звеном 8, которое шарнирно связано с выходным звеном 9, смонтированным в прямолинейных направляющих 10. На промежуточном звене перпендикулярно его продольной оси закреплены стержни 11 и 12, смонтированные в прямолинейных направляющих 13. Ролик 7 звена 8 размещен в фигурном пазу 14, выполненном в теле ведущего кулачка 5.
Исполнительный механизм 2 включает ведущее звено, которым является выходное звено 9 передаточного механизма, два выходных звена 15 и 16 с губками 3 для захвата изделий, шарнирно связанных посредством пальца 17 с упомянутым ведущим звеном, неподвижный кулачок-копир 18 с фигурными пазами 19 и 20 для сопряжения с роликами 21 и 22, смонтированными на свободных концах выходных звеньев 15 и 16.
Манипулятор для передачи изделий работает следующим образом.
При работе привода 4 его выходное звено 6 генерирует возвратно-поступательное движение ведущего кулачка 5, при этом ролик 7, взаимодействуя с фигурным пазом 14 в теле кулачка, вызывает поступательное движение промежуточного звена 8 и шарнирно связанного с ним выходного звена 9, при этом оба звена перемещаются синхронно, как единое жестко связанное звено. На границах ходов выходных звеньев 15 и 16 губки, имитирующие движение выходных звеньев, занимают разжатое положение. Одна из границ ходов соответствует позиции «схват изделия», другая - позиции «выдача изделия».
В позиции «схват изделия» в разжатые губки подается изделие - объект манипулирования. В начале рабочего хода губки, имитируя движение выходных звеньев, сжимаются, охватывая изделие по большей части его периметра, и переносят изделие в другую позицию. Разжатое и сжатое положения губок обеспечиваются в результате взаимодействия роликов 21 и 22 выходных звеньев 15 и 16 с фигурными пазами 19 и 20 в теле копира 18.
По достижении позиции «выдача изделия» губки разжимаются, перестают удерживать изделие и оно выводится из манипулятора. При холостом ходе (без изделия) губки также занимают сжатое положение, поскольку ролики 21 и 22 выходных звеньев 15 и 16 взаимодействуют с теми же фигурными пазами в теле копира 18, что и при рабочем ходе.
Предложенное конструктивное выполнение манипулятора для передачи изделий позволит снизить энергозатраты на процесс передачи изделий, повысить производительность и точность выполнения операций, составляющих процесс передачи изделий от машины к машине, например, в линии приведения рыбных консервов в товарный вид.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333827C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
Изобретение относится к устройствам со сложным движением выходных звеньев, применяемым при обслуживании работы технологических машин, станков, прессов. Манипулятор содержит передаточный механизм с ведущим и выходным звеньями, исполнительный механизм с ведущим звеном, являющимся выходным звеном передаточного механизма, выходными звеньями с губками для захвата изделий и неподвижным кулачком-копиром с фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма и привод. Ведущее звено передаточного механизма выполнено в виде кулачка, совершающего возвратно-поступательное движение, а выходное звено передаточного механизма кинематически связано с ведущим посредством промежуточного звена, совершающего поступательное движение в плоскости, перпендикулярной плоскости движения кулачка. Изобретение обеспечивает точность функционирования и повышение производительности с малыми энергозатратами. 2 з.п. ф-лы, 1 ил.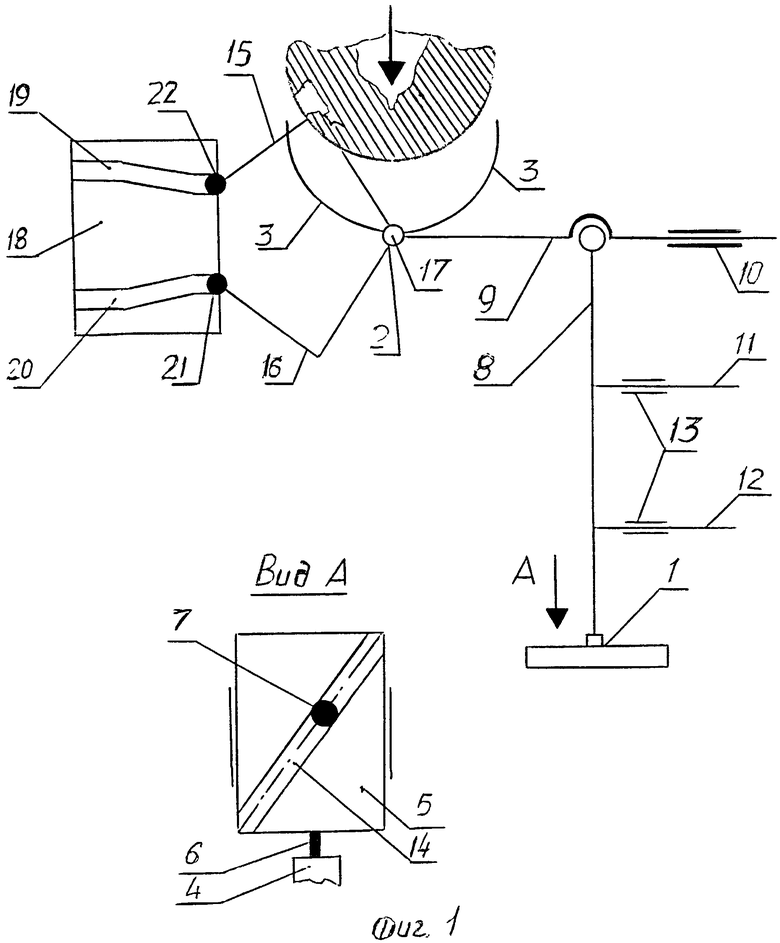
1. Манипулятор для передачи изделий, содержащий передаточный механизм с ведущим и выходным звеньями, исполнительный механизм с ведущим звеном, являющимся выходным звеном передаточного механизма, выходными звеньями с губками для захвата изделий и неподвижным кулачком-копиром с фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма и привод, отличающийся тем, что ведущее звено передаточного механизма выполнено в виде кулачка, совершающего возвратно-поступательное движение, выходное звено передаточного механизма кинематически связано с ведущим звеном посредством промежуточного звена, совершающего поступательное движение в плоскости, перпендикулярной плоскости движения кулачка.
2. Манипулятор по п.1, отличающийся тем, что на одном конце промежуточного звена смонтирован ролик для взаимодействия с рабочим профилем ведущего кулачка, а другой конец промежуточного звена шарнирно связан с выходным звеном.
3. Манипулятор по п.2, отличающийся тем, что на промежуточном звене перпендикулярно его продольной оси закреплены, по меньшей мере, два стержня, сопряженные с прямолинейными неподвижными направляющими.
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312763C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

