Изобретение относится к автоматике и может быть использовано для управления угледобывающими комплексами, работающими в автоматизированном ре- жиме в условиях тонких пологих пластов со сложной горно-геологической обстановкой.
Цель изобретения - повьшение безопасности работ и увеличение произво- дительности комплекса за счет ликвидации простоев, обусловленных задав- ливанием секций крепи.
Новизна способа заключается в том что в отличие от регулирования ско- рости подачи комбайна в зависимости от нагрузки на двигатель и скорости конвейера предлагается дополнительно регулировать скорость подачи комбайна в зависимости от скорости опуска- 1ния верхнего перекрытия секции крепи и в случае возникновения опасности задавливания секций крепи увеличивать скорость подачи комбайна так, чтобы успеть передвинуть крепь до того, как секция будет задавлена.
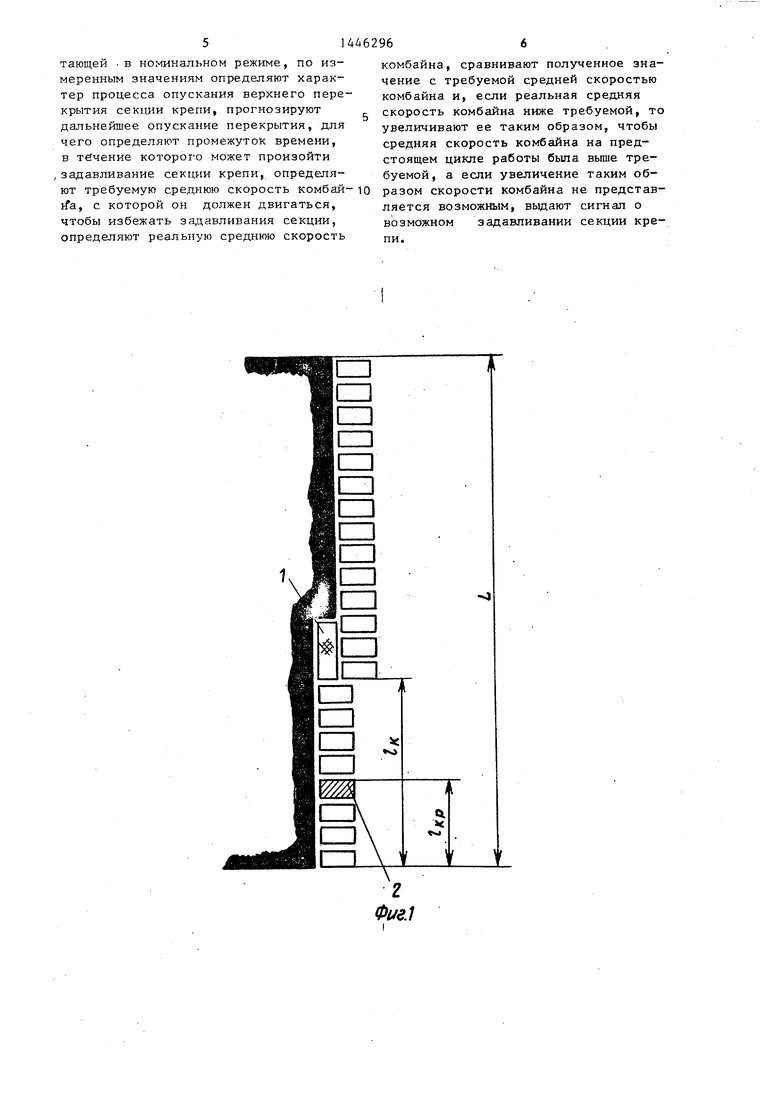
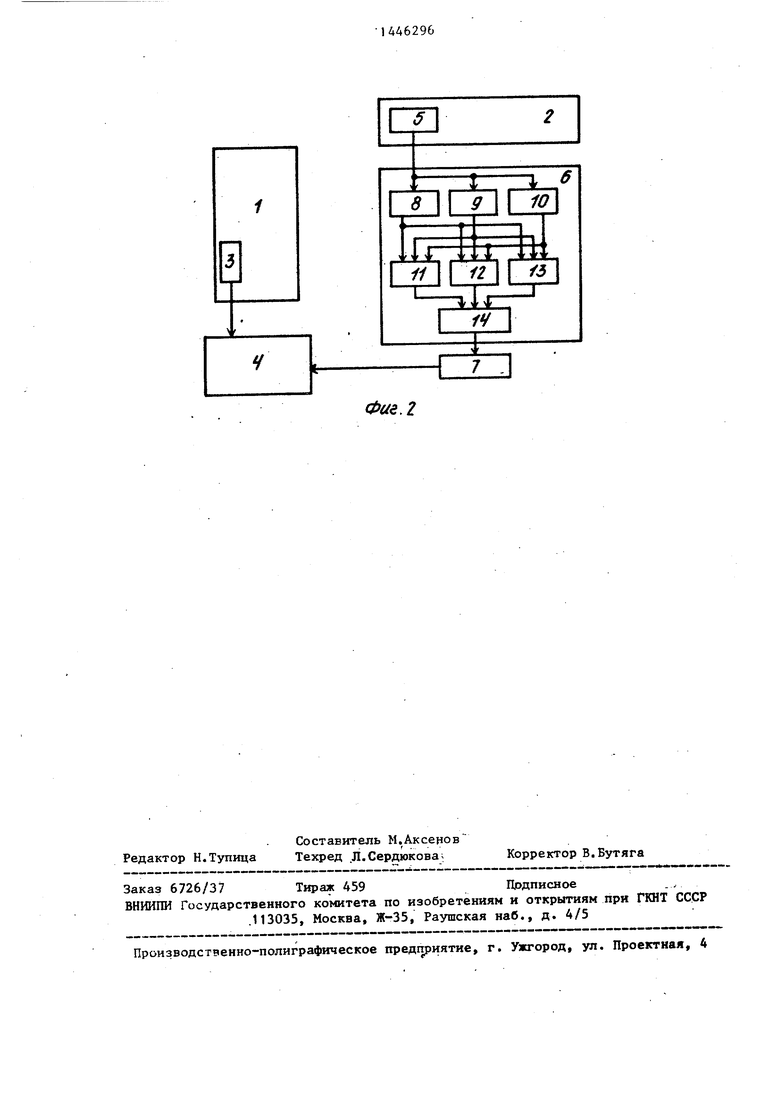
На фиг. 1 изображено расположение комбайна 1 и крепи 2 в кoмплeкcнo- e- ханизированном забое (лаве);на фиг.2 структурная схема системы, р.еализую- щей способ управления очистным механизированным комплексом.
Процесс опускания верхнего перекрытия крепи достаточно медленный и его можно измерить и сделать выводы о его характере и скорости. Наличие информации о ходе процесса опускания перекрытия дает возможность принять управляющие воздействия по предотвращению посадки (задавливания) секции крепи на жесткую.
Решить задачу получения информаци о характере опускания верхнего перекрытия можно путем изменения скорост этого процесса и дальнейшего прогно- зирования его во времени.
Дпя получения возможности опера- тивно определять характер пов1гдения перекрытия крепи во времени аппроксимируют характеристики этого процесса с помощью полиномов второй степени:
b(t)
а, + a,t + ,
значения величины распора 55 (раздвижности) крепи; коэффициенты, учитывающие тип кровли и характер А:ти - ки крепи.
Дпя прогнозирования опускания кровли в ходе угледобычи измеряется распор перекрытия крепи через равные промежутки времени и определяются коэффициенты а, а,, а. Поскольку неизвестных коэффициентов три, то достаточно три размера, по результатам которых рассчитываются указанные коэффициенты :
h(t,) а„ + a,t, -I-
h(tj) ао + а,Ц + (2) h(t3) ао + a,t + ,
где h(t, ),h(t,j)
h( tj) - значения величрш распора верхнего перекрытия крепи, измеренное три раза через промежутки &t;
а, а,, а - искомые коэффициенты аппроксимирующего выражения. .
Решая известными методами систему уравнений (2), можно определить коэффициенты а,, а, ад. По ним получаем формулу (1). с численными значениями коэффициентов, с помощью которой методом экстраполяции прогнозируется поведение верхнего перекрытия крепи.
Делью прогноза является определение такого момента времени, когда верхнее перекрытие опустится настолько, что произойдет задавливание крепи.
Приравняв уравнение (1) значению начальной раздвкясности В и решив его относительно t, можно определить период времени, в течение которого исчерпается начальная раздвижностъ и произойдет задавливание крепи:
(3)
И а.
а t +
дБ
CQ
55
&t,
-a, +-Jat HJ ,-2 После решения уравнения (3) становится известным промежуток времени, в течени.е. которого произойдет посадка крепи на жесткую. К концу этого промежутка необходимо вывести секцию из этого места, т.е. передвинуть крепь.
Зная имеющийся промежуток времени, дпину лавы и мест9 нахождения комбайна, определяют среднкяо скорость,, с которой должен двигаться комбайн, .
чтобы успеть передвинуть крепь из опасного участка (фиг. 1):
где
ср.х V
(.
.Ы At
+ L + 1
liLJ
(А)
ср. к
L 1„ требуемая средняя скорост
комбайна;
длина лавы;
Р
V
ср.к
где V
р.К
расстояние от начала лавы до места нахождения комбайна;
расстояние от начала лавы до рассматриваемой крепи. В числителе формулы (4) - путь, ; который необходимо пройти комбайну 1 до рассматриваемой секции крепи 2 (фиг. 1). Он слагается из расстояния от комбайна до конца лавы (L - IK) всей длины лавы L и расстояния от начала лавы до секции крепи .
Чтобы не произошло задавливания крепи, необходимо выполнение условия
Vp.,(5)
- реальная скорость комбайн в лаве,
Если условие (5) не выполняется, то необходимо увеличить скорость подачи комбайна так, чтобы V.. стала больше.
Если условие (5) выполняется, т.е реальная средняя скорость комбайна на участке выше требуемой для предотвращения задавливания секции, то регулирование скорости осуществляетс так же, как в известном способе, бе учета опускания перекрытия.
.Предлагаемый способ реализуется с помощью системы автоматизированного контроля состояния крепи. Поскольку каждая секция может быть задавлена, /itj, определяется для каждой секции. Если полученное u.tii(it цикла (время цикла выемки угля в лаве), то такие секции из дальнейшего анализа исключаются. определяется для секций у которых цикла. Таких секций может быть несколько, тогда Vcn выбирается максимальной по всем секци- ям.
Для упрощения все операции описываются для одной секции.
Система, реализующая способ управления очистным механизированным комп лексом, содержит (фиг.2) установленный на комбайне I датчик 3 положения комбайна, выход Которого связан с . первым входом ЭВМ 4. На секции крепи
46296
2 установлен датчик 5 раздвижности, сигналы с которого поступают на вход вычислительного устройства 6, выход ц которого через аналого-цифровой преобразователь 7 (АЦП) подключен к второму входу ЭВМ 4.
Вычислительное устройство состоит их трех блоков 8-10 задержки, трех блоков 11-13 расчета коэффициентов и блока 14 расчета промежутка времени.
Способ осуществляют следующим образом.
В процессе работы комплекса в мо10
15 менты времени t
t и
t., датчиком 5
раздвижности измеряются величины распора верхнего перекрытия секции крепи, соответственно h(t,), h(t2) и h(t). Электрические сигналы, пропорциональные указанным величинам распора, поступают, на входы соответственно первого 8, второго 9 и третьего 10 блоков задержки. По окончании трех размеров распора указанные сигналы с
выходов блоков задержки поступают на входы каждого из блоков 11-13 расчета коэффициентов, где по формулам (2) определяются соответственно коэффициенты а, а, а 2, характеризующие
горно-технические условия конкретной лавы. Вычисленные значения коэффициентов поступают на вход блока 14, где по формулам (3) рассчитывается промежуток времени ut.,, значение которого в виде аналогового сигнала поступает на вход АЦП 7 и, преобразуясь в цифровой сигнал, заводится на второй вход ЭВМ 4, с помощью которой по формуле (4) рассчитывается требуемая средняя скорость комбайна V,- , значение которой затем сравнивается с реальной средней скоростью комбайна
. Формула изобретения
Способ управления очистным механизированным комплексом, основанный на измерении нагрузки на привод комбайна с последующим изменением скорости подачи в сторону ее снижения при увеличении нагрузки, отличающийся тем, что, с целью повышения безопасности работ и производительности комплекса за счет ликвидации простоев, обусловленных задавливанием секций крепи, измеряют через заданные промежутки времени величину распора каждой секции, рабо
тающей в номинальном режиме, по измеренным значениям определяют характер процесса опускания верхнего перекрытия секции крепи, прогнозируют дальнейшее опускание перекрытия, для чего определяют промежуток времени, в течение которого может произойти задавливание секции крепи, определяют требуемую среднюю скорость комбай- ifa, с которой он должен двигаться, чтобы избежать задавливания секции, определяют реальную среднюю скорость
комбайна, сравнивают полученное значение с требуемой средней скоростью комбайна и, если реальная средняя скорость комбайна ниже требуемой, то увеличивают ее таким образом, чтобы средняя скорость комбайна на предстоящем цикле работы была выше требуемой, а если увеличение таким образом скорости комбайна не представляется возможным, выдают сигнал о возможном задавливании секции крепи.
Изобретение относится к горной автоматике и м.б. использовано в угледобывающих комплексах. Цель - повышение .безопасности работ и производительности комплекса за счет ликвидации простоев, обусловленных задавлн- ванйем секций крепи. Для этого измеряют через заданные промежутки времени величину каждой секции, работающей в номинальном режиме. По измененным значениям определяют характер процесса опускания верхнего перекрытия секции крепи. Прогнозируют дальнейшее опускание перекрытия. Для этого определяют промежуток времени, в течение которого происходит задавливание секции крепи. Затем определяют требуемую среднюю скорость комбайна, с которой он должен двигаться. Для избежания задавливания секции определяют среднюю скорость комбайна. Сравнивают полученное значение с требуемой средней скоростью комбайна. При реальной средней скорости ниже требуемой увеличивают ее так, чтобы средняя скорость На представляющем цикле работы была вьше требуемой. В случае невозможности увеличения скорости вьщают сигнал о задавливании секции крепи. 2 ил. (Л
Фие.2
| Способ регулирования скорости подачи комбайна | 1981 |
|
SU968391A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ автоматического управления забойной машиной и конвейером | 1971 |
|
SU583304A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
