Изобретение относится к устройствам для подводного отбора и подъема на поверхность проб грунта и полезных ископаемых и может быть использовано при проведении исследований грунта дна водных акваторий.
Целью изобретения является повышение эффективности работы за счет увеличения количества отбираемой пробы грунта, точности ее забора и надежности работы устройства.
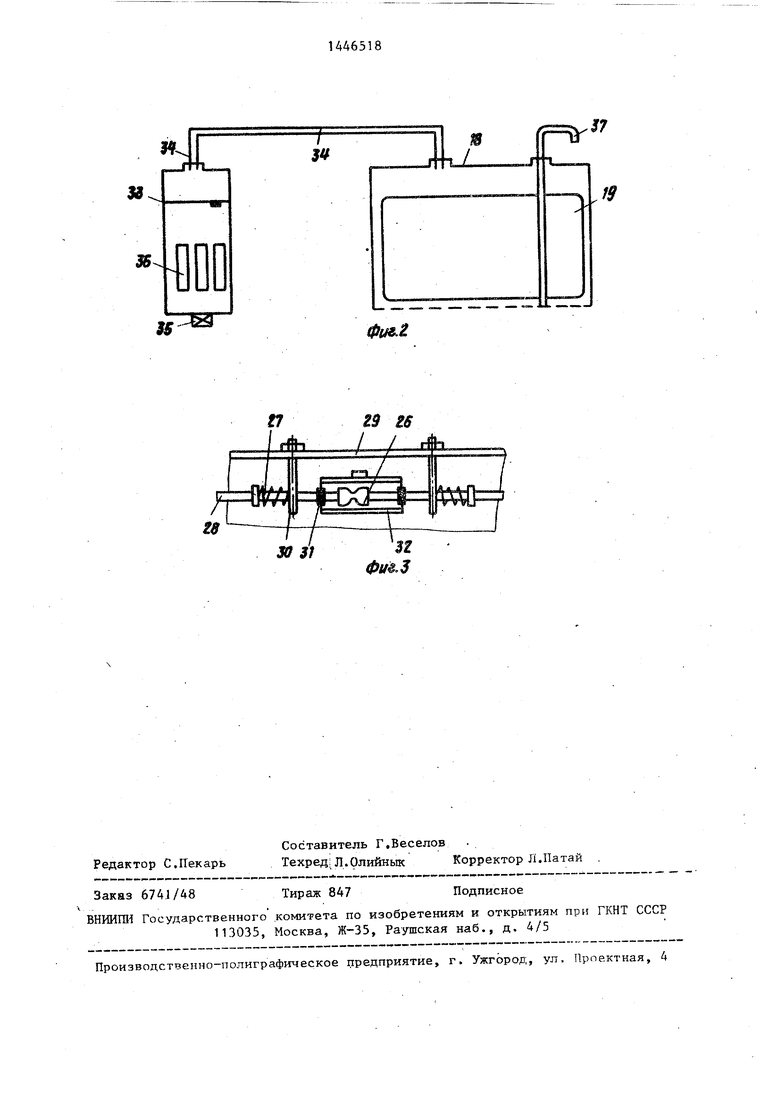
На фиг, приведено устройство с пробоотборным органом, общий вид; на фиг,2 - газогенератор, общий вид; на фиг,3 - сбросной механизм, общий вид.
. Устройство вьтолнено в виде горизонтального ориентированного удлиненного тела цилиндрической формы, имеющего в поперечном сечении форму правильного десятиугольника,. Наличие плоских граней на поверхности аппарата повышает технологичность изготовления несущей рамы и легкого корпуса без существенного ухудщения гидродинамических свойств устройства.
Конструктивно устройство объединено в четыре самостоятельных функциональных модуля, крепящихся на общую несущую раму корпус 1, Это модули постоянной и переменной плавучести, модуль сбора сырья и энергетический модуль.
Рама выполнена из тонкостенных труб, внутренняя полость которых заполнена механической смесью масла и стеклянных микросфер, что позволяет придать конструкции рамы нулевую или небольшзто положительную плавучесть.
Модуль постоянной плавучести состоит из трех отдельных блоков, размещенных с йосовой 2, средней 3 и кормовой 4 частях аппарата. Блоки модуля собраны из отдельных сферопласти- ковых элементов, склеенных между собой компаундом на основе .эпоксидной смолы,
Об Ь.ем и размещение блоков 2-4 по длине устройства рассчитано таким образом, что в порожнем состоянии обеспечивается дифферент устройства на нос в пределах 10-12 , а в состоянии с грузом дифферент на корму -Той же величины. Такое изменение дифферента устройства в процессе эксплуатационного цикла погружение-всплы тие позволяет уменьшить затраты энергии на его стабилизацию и управт
0
s
0
5
0
5
0
5
0
5
ление.в 1,2-1,3 раза по сравнению с дифферентом на ровный киль.
В верхней части носового блока плавучести для облегчения поиска всплывшего аппарата в море размещены свето- и радиомаяки 5, заключенные в отдельные прочные корпуса из стекла, В кормовом и носовом блоках плавучести по центральной оси устройства выполнены цилиндрические направляющие ниши-каналы 6 с раструбами 7 внизу, В нижней части раструбов смонтированы направляющие решетки 8, Нижняя часть каналов выходит в полость, образованную днищевой частью устройства, В нишах-каналах 6 укреплены подруливающие двигатели 9 вертикального перемещения , В кормовом блоке установлены две неподвижные насадки 10 маршевых двигателей J1, которые имеют ограждение 12, Оси насадок параллельны основной линии устройства и развернуты под углом 10° наружу по отношению к диаметральной плоскости устройства для улучшения его маневренности. Модуль переменной плавучести состоит из прочных корпусов 3 для воздуха или газа высокого давления, прочных корпусов 14 для балластной жидкости, насосных станций 15 для перекачки балластной жидкости, а же из управляющих каналов, трубопро- водов и другой гидравлической арматуры (не показаны), в нем также размещена насосная станция 16 привода маршевых двигателей.
Здесь же установлены прочные корпуса 17 системы управления и цистерна 18 для размещения эластичной емкости 19, куда в процессе работы выкачивается балл:астная жидкЬсть из прочных корпусов 14,
Марщевые и подруливающие двигатели снабжены реверсивными гидромотора- /ми (не показаны), работа которых обес- печивается от насосной станции 15, Непосредственно за насадками 10 маршевых двигателей 11 расположены горизонтальные кормовые рули 20, которые быть оборудованы дистанционным Приводом, связанным с системой управления устройства (не показаны). Винты двигателей приводятся во вращение гидромоторами (не показаны). Модуль сбора включает в себя рабочее колесо 21 с лопастями, оснащенное приводом с понижающим редуктором (не показаны), и бункером 22 для груза. Ра31446518
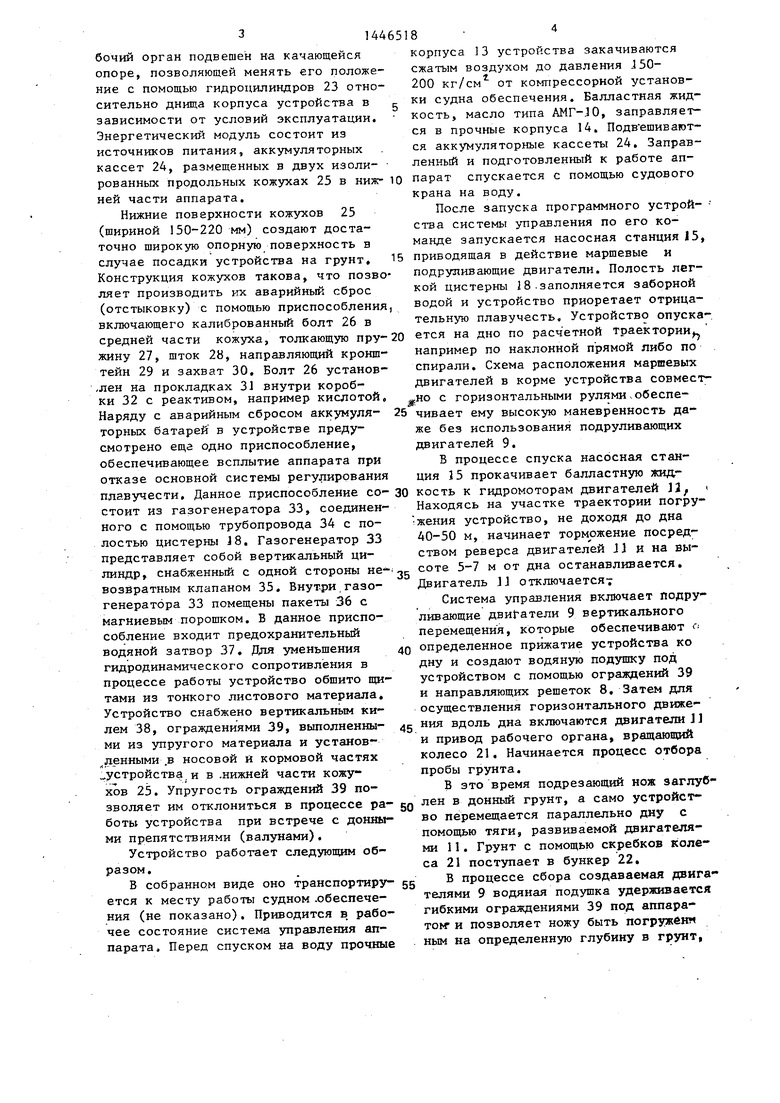
бочий орган подвешен на качающейся корпуса 13 устройства закачиваются опоре, позволяющей менять его положа- сжатым воздухом до давления J50- ние с помощью гидроцилиндров 23 отно- 200 кг/см от компрессорной установ- сительно днища корпуса устройства в с судна обеспечения. Балластная жид- зависимости от условий эксплуатации. кость, масло типа АМГ-JO, заправляет- Энергетический модуль состоит из ся в прочные корпуса 14. Псдв ешивают- источников питания, аккумуляторных . ся аккумуляторные кассеты 24. Заправ- кассет 24, размещенных в двух изоли- ленный и подготовленный к работе ап- рованных продольных кожухах 25 в ниж- 10 парат спускается с помощью судового ней части аппарата.крана на воду.
Нижние поверхности кожухов 25 После запуска программного устрой- (шириной 150-220 мм) создают доста ства системы управления по его ко- точно широкую опорную поверхность в манде запускается насосная станция 15, случае посадки устройства на грунт, 15 приводящая в действие маршевые и Конструкция кожухов такова, что позво- подруливающие двигатели. Полость лег- ляет производить кх аварийный сброс кой цистерны 18 .заполняется заборной (отстыковку) с помощью приспособления, водой и устройство приоретает отрица- включающего калиброванный болт 26 в тельную плавучесть. Устройство опуска- средней части кожуха, толкающую пру-20 ется на дно по расч етной траектории жину 27, шток 28, направляющий кронш- например по наклонной прямой либо по теин 29 и захват 30, Болт 26 устаиов- спирали. Схема расположения маршевых
,лен на прокладках 31 внутри короб- двигателей в корме устройства совмест- ки 32 с реактивом, например кислотой, но с горизонтальными рулями,обеспе- Наряду с аварийным сбросом аккумуля- 25 чивает ему высокую маневренность да- торных батарей в устройстве преду- же без использования подруливающих смотрено еще одно приспособление, двигателей 9.
обеспечивающее всплытие аппарата при Б процессе спуска насосная стан- отказе основной системы регулирования ция 15 прокачивает балластную жид- плавучести. Данное приспособление со- 30 кость к гидромоторам двигателей 3 стоит из газогенератора 33, соединен- Находясь на участке траектории погру- ного с помощью трубопровода 34 с по- жения устройство, не доходя до дна лостью цистерны 18. Газогенератор 33 40-50 м, начинает торможение посред- представляет собой вертикальньй ци- ством реверса двигателей JJ и на вы- линдр, снабженный с одной стороны не-ч н останавливается, возвратным клапаном 35, Внутри,газо- Двигатель JJ отключаетсят генератора 33 помещены пакеты 36 с Система управления включает подру- магниевым порошком. В данное приспо- ливающие двигатели 9 вертикального собление входит предохранительный перемещения, которые обеспечивают водяной затвор 37, Для уменьшения 40 определенное прижатие устройства ко гидродинамического сопротивления в дну и создают водяную подушку под процессе работы устройство обшито щи- устройством с помощью ограждений 39 тами из тонкого листового материала, и направляющих решеток 8, Затем для Устройство снабжено вертикальным ки- осуществления горизонтального движе- лем 38, ограждениями 39, выполненны- 45 вдоль дна включаются двигатели J ми из упругого материала и установ- и привод рабочего органа, вращающий
ленными .в носовой и кормовой частях колесо 21, Начинается процесс отбора
устройства и в .нижней части кожу- пробы грунта.
хов 25. Упругость ограждений 39 по- В это время подрезающий нож заглуб- зволяет им отклониться в процессе ра- 50 донный грунт, а само устройст- боты устройства при встрече с донны во перемещается параллельно дну с ми препятствиями (валунами).помощью тяги, развиваемой двигателяУстройство работает следующим об- ми 11. Грунт с помощью скребков коле- разом,са 21 поступает в бункер 22,
В собранном виде оно транспортиру- 55 процессе сбора создаваемая двигается к месту работы судном .обеспече- телями 9 водяная подушка удерживается ния (не показано). Приводится в. рабо- гибкими ограждениями 39 под аппара- чее состояние система управления ап- TOW и позволяет ножу быть погружен парата. Перед спуском на воду прочные ным на определенную глубину в грунт,
а также дает возможность свободно передвигать устройство эдоль дна.
Балластная жидкость в это время поступает во всасьгоающую полость насос- 5 ной станции 16,
После того, как устройство за определенное время заканчивает отбор пробы, системы его выключаются.
После паузы подается сигнал с сис-Ю темы управления, который включает гидромоторы соединенных последовательно насосных станций J 5 на перекачку балластной жидкости. Одновременно подается управляющий сигнал на перепуск 15 сжатого воздуха из прочных корпуг сов 13 в корпуса 14. Одновременно осуществляется перекачка балластной жидкости из корпусов J4 в эластичную емкость 19 полости легкой цистерны 18 20 без затрат большого количества электроэнергии от аккумуляторов. После завершения процесса перекачки балластной жидкости устройство приобретает нулевую или положительную плавучесть 25 в зависимости от загрузки бункера. Для подъема устройства на поверхность включаются гидромоторы маршевых дви - гателей 13, После всплытия на поверхность двигатели IJ отключаются и 30 включается система обнаружения, световой маяк 5 и радиомаяк, входящие в систему управления.
На поверхности по команде программного устройства выпускается в атмо- j сферу сжатый воздух из прочных корпу-.
сов 14, Цикл работы на этом заканчивается,
В случае аварийного всплытия уст;- ройства реактив через определенней . момент времени разъедает бол 26 и происходит сброс кожухов 25 вместе с источником питания, сброс кожухов под водой позволяет использовать их в качестве аварийного балласта,
Наряду с аварийным сбросом источников питания при отказе,основной системы регулирования плавучести используется газогенератор 33. Специальное устройство, например часовой механизм с ударником (не показан), обеспечивает контакт магниевого порошка с забортной водой через заданный временной интервал. Образующийся при этом водород поступает в верхнюю часть цистернь J8 и вытесняет находящуются там воду. Положительная плавучесть при этом составит окололо 2000 И.
50
55
5 0
0
5
Устройство для подводного отбора проб имеет следующие преимущества перед известными. Повышается КПД устройства при погружении на любую глубину за счет отбора за один спуско- подъем большого количества проб, уменьшаются габариты и вес за счет регулирования грузоподъемности устройства, исключения использования твердых балластных грузов и загряз- н ение ими дна глубоководных водоемов, повышается маневренность и функциональная гибкость устройства, а следовательно, точность пробоотбора при работе на дне. За счет конструктивного выполнения блока постоянной плавучести и каналов с решетками снижаются транспортные потери отобранной пробы при применении бункера. Повышается в конечном итоге эффективность работы устройства за счет снижения общей себестоимости пробоотбора ЖМК, применения сбросных устройств и газогенератора.
Преимущество данного устройст--. ва по сравнению с известными путем повышения эффективности работы достигается за счет того, что предлагаемое устройство может отбирать за один спускоподъем значительное количество лроб грунта. Применение модуля постоянной плавучести, выполненного из отдельньпс блоков, размещенных в носовой, средней и кормовой частях, позволяет при работе устройства на дне принимать устойчивое горизонтальное положение и сокращать при этом время «аабора грунта, т,е. также повьш1ать эс{)фективность,
Снабжение устройства пери ферийны- ми ограждениями, каналами с раструбами и направляющиг ш решетками позволяет применять двигатели вертикального перемещения, когда устройство при пробоотборе на ДНЕ касается его не всем корпусом, а лишь рабочим органом, за счет возникновения эффекта так называемой водяной подушки, Такой эффект не достигается при работе на маршевых двигателях.
За сче т применения управляемых двигателей повышается маневренность и функциональная гибкость устройства, т.е. повьш1ается точность пробоотбора, ЧТО необходимо при проведении разведочных работ в океане для обнаружения полей залега:ния, плотности зале- гания и состава грунтов.
Надежность работы устройства в том, что в случае аварии при ПОМОЕЩ сбросног О устройства отсоединяются кожухи с аккумуляторами и устройство приобретает положительную плавучесть, самостоятельно, без помощи двигателей, поднимаясь на поверхность. На- ряду с этим может быть использован газогенератор, образующийся при этом газ позволяет также аппарату приобрести положительную плавучесть.
Формула изобретения
1. Устройство для подводного отбора проб грунта и полезных ископаемых, включающее корпус с модулем постоянной плавучести, маршевые двигатели с насадками, грунтозаборный орган, установленный в нижней части устройства, рули, модуль переменной плавучести и источники питания, о т л и - ч ающе е с я тем, что, с целью
среднего и кормойого блоков, располо женных в соответствующих частях корпуса устройства, а носовой и кормо- вой блоки этого модуля вьтолнены с каналами, раструбами и направляющими решетками, причем модуль переменной плавучести снабжен газогенератором,а грунтозаборный орган снабжен уста- 10 новленным внутри него бункером-накоп телем и гидроцилиндрами,
2,Устройство по п.J, отличающееся тем, что сбросное устройство выполнено в виде кронштей на, установленного на нем захвата, пруж11Йы со штоком и калиброванного болта, установленного на штоке с воз можностью взаимодействия с пружиной.
3,Устройство по П.1, о т л и 20 чающееся тем, что насадки ма шевых двигателей установлены под углом J 0° к диаметральной плоскости устройства,
4,Устройство по П.1, о.т л и 15
повышения эффективности его работы за 25 чающееся тем, что носовой и
кормовой блоки модуля постоянной пла вучести снабжены установленными в их каналах подруливающими двигателями,
счет увеличения количества отбираемой пробы и представительности ее, а также надежности работы устройства, оно снабжено двумя кожухами для источников питания со сбросными устройствами, установленными дв-умя параллельными рядами в нижней части устройства, и периферийными ограждениями, установленными в носовой и нижней частях кожухов, при этом модуль постоянной плавучести выполнен из носового.
среднего и кормойого блоков, расположенных в соответствующих частях корпуса устройства, а носовой и кормо- вой блоки этого модуля вьтолнены с каналами, раструбами и направляющими решетками, причем модуль переменной плавучести снабжен газогенератором,а грунтозаборный орган снабжен уста- новленным внутри него бункером-накопителем и гидроцилиндрами,
2,Устройство по п.J, отличающееся тем, что сбросное устройство выполнено в виде кронштейна, установленного на нем захвата, пруж11Йы со штоком и калиброванного болта, установленного на штоке с возможностью взаимодействия с пружиной.
3,Устройство по П.1, о т л и чающееся тем, что насадки маршевых двигателей установлены под углом J 0° к диаметральной плоскости устройства,
4,Устройство по П.1, о.т л и
чающееся тем, что носовой и
кормовой блоки модуля постоянной плавучести снабжены установленными в их каналах подруливающими двигателями,
5.Устройство по n.J, отличающееся тем, что газогенератор выполнен в виде цилиндра с водя- . ным затвором и клапаном.
6.Устройство по П.1, отли- чающееся тем, что рули установлены за насадками маршевых двигателей и снабжены ограждениями,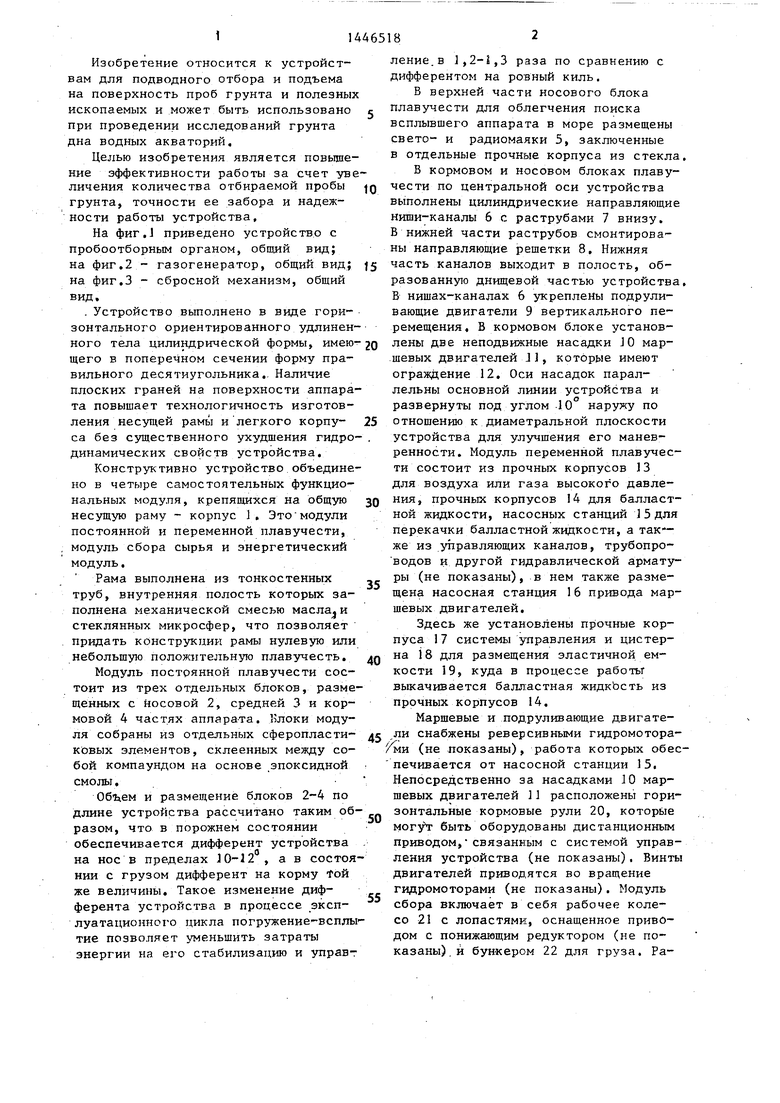
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подводного отбора проб грунта и полезных ископаемых | 1987 |
|
SU1446520A1 |
| АВИАДЕСАНТИРУЕМЫЙ СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2022 |
|
RU2782037C1 |
| Плавучий кессон-завод | 1983 |
|
SU1188249A1 |
| ПОДВОДНЫЙ ТАНКЕР | 1993 |
|
RU2062731C1 |
| ПОДВОДНЫЙ ГАЗОВОЗ ДЛЯ ТРАНСПОРТИРОВКИ СЖИЖЕННОГО ПРИРОДНОГО ГАЗА ИЗ АРКТИЧЕСКИХ РАЙОНОВ | 2022 |
|
RU2779768C1 |
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| Транспортировщик водолазов | 2021 |
|
RU2760757C1 |
| ПЛАВАЮЩАЯ БРОНИРОВАННАЯ ГУСЕНИЧНАЯ МАШИНА | 2006 |
|
RU2326769C2 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| ЭКСКУРСИОННЫЙ КОМПЛЕКС ДЛЯ МОРСКИХ ПРОГУЛОК | 2001 |
|
RU2215667C2 |
Изобретение относится к устройствам для подводного отбора и подъема на поверхность проб грунта и полезных ископаемых к может быть использовано при проведении исследований грунта дна водных акваторий. Целью изобретения является повьшение эффективности работы за счет системы регулирования плавучести замкнутого типа, увеличивая количества отбираемой пробы и повышения точности пробоотбо - ра. Устройство содержит систему регулирования плавучести, использующую принцип изменения объема гибкой полости за счет перекачки в нее масла из прочных корпусов, выполнено в виде горизонтально ориентированного тела удлиненной формы и снабжено тремя самостоятельными блоками постоянной плавучести из сферопластика несущей рамы, на которой смонтированы прочные корпуса систем регулирования ппаву - чести и управления устройством, насосными станциями приводов длительно- го комплекса и регулирования плавучес-- ти, маршевыми двигателями в непод - вижных насадках и вертикальными подруливающими устройствами в поперечных каналах, расположенными в носовой и кормовой оконечностях, перпендику лярно). основной плоскости устройства, 5 з,п.ф-лы, 3 ил. (Л С PMWnv 9d :л тЛ эо
i.ir .
V ,п а гз 33 13
20 3
ZS 8 Zt
3S
:
19
| Авторское свидетельство СССР № 999749, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство дельта-модуляции с цифровой адаптацией | 1980 |
|
SU930664A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
